机器人淋浆系统的设计毕业论文
2020-04-12 15:44:08
摘 要
熔模铸造能够生产并且适合生产表面光洁度高、尺寸精度高、复杂形状的部件,因此在航空、武器、医疗器械等领域备受欢迎。随着这些行业的蓬勃发展,由熔模铸造制成的工件需求量越来越大。然而铸造型壳淋砂淋浆工艺过程突出存在工作劳动强度大、人力效率低下、工艺制造质量水平不稳定等问题,所以目前需要改进该工艺的生产方式,使得铸造后的产品质量得以保证,与此同时经济性也要符合企业的预期。本文设计一套机器人和人工协同加工共融式系统,实现将工人从高强度人力劳动中解放出来并提高生产效率与质量的目标。
本文首先通过对熔模铸造精密技术国内外现状的充分调研,了解了基本的熔模铸造自动化生产线的思路。在完成了ABB机器人的选型和机械结构的设计后,利用RobotStudio仿真软件进行实际自动化生产线的模拟,编写相应的机器人程序。再针对机器人所需完成的动作,利用西门子PLC开发一套控制系统,实现人机交互。该系统能完成高强度重复的型壳淋浆淋沙等工艺过程。在加工过程中机器人与工人协同加工,准确高效地完成加工任务,同时很好地保证工人的安全。
关键词:熔模铸造;ABB机器人;RobotStudio;PLC控制
Abstract
Investment casting can produce and is suitable for the production of parts with high surface finish, high dimensional accuracy, and complex shapes. Therefore, Investment casting is popular in the fields of aviation, weapons, and medical equipment. As these industries thrive, the demand for work pieces made from investment castings is increasing. However, the cast-in-shell leaching process has the problems of high labor intensity, low manpower efficiency, and unstable process quality. Thus, it is necessary to improve the production method of the process so that the quality of the product after casting can be guaranteed. At the same time, economic performance must also meet the company's expectations. In this paper, a robotic and artificial collaborative processing fusion system is designed to achieve the goal of liberating workers from high-intensity human labor and improving production efficiency and quality.
Through the full investigation of precision technology at home and abroad in investment casting, I have understood the basic idea of the investment casting automation production line. After completing the selection of the ABB robot and the design of the mechanical structure, the RobotStudio simulation software has been used to simulate the actual automated production line and prepared the corresponding robot program. Then aiming to control the robot to complete the required actions, I have used Siemens PLC to develop a control system to achieve human-computer interaction. The system can complete high-strength repeated shell leaching and other processes. In the process of processing, the robots and the workers cooperate to complete the processing tasks accurately and efficiently while ensuring the safety of the workers.
Key Words:Investment Casting;ABB Robot;RobotStudio;PLC control
目 录
第1章绪论 1
1.1熔模铸造工艺流程 1
1.2国内外研究现状 2
1.2.1国内研究现状 2
1.2.2国外研究现状 3
1.3课题来源、研究内容与意义 6
1.4论文主要研究与开发工作 7
第2章机械系统的设计 9
2.1机器人的选型 9
2.2机械抓手的设计 9
2.3工艺路线的设计 11
第3章系统开发 12
3.1仿真软件介绍 12
3.2系统的要求及思路 12
3.3仿真系统设计 14
3.3.1搭建仿真平台 14
3.3.2仿真和离线编程流程 15
3.3.3仿真运行I/O信号 16
3.3.4核心组件介绍 16
3.3.5动态Smart组件的设计 18
3.4系统编程和仿真 19
3.4.1程序编制 19
3.4.2仿真分析 21
第4章控制系统的设计 24
4.1控制系统需求分析 24
4.2控制系统总体方案设计 24
4.2.1 PLC的选型 24
4.2.2触摸屏的选型 25
4.2.3软件介绍 26
4.3控制系统开发 27
第5章总结与展望 32
5.1总结 32
5.2展望 32
参考文献 34
附录 36
致谢 47
第1章 绪论
1.1 熔模铸造工艺流程
熔模铸造又称失蜡法铸造,在蜡模表面涂上多层耐火材料,如高岭矾土、石英砂等,待其彻底硬化干燥后,熔去其中的蜡模从而制成型壳,再经过高温焙烧,以减小型壳的热膨胀系数,最后对其进行浇注,获得铸件的一种常用方法。由于获得的铸件都具有较好的线性尺寸公差、形位公差和表面粗糙度,故也称为“熔模精密铸造”,熔模精密铸造相对于普通的砂型铸造,工艺较为复杂,工艺要求也高。熔模精密铸造是一项近净形成形工艺,它不仅适用于各种类型的合金铸造,还适用于铸造耐高温、形状复杂铸件[1]。

图1.1 熔模铸造过程描述
如图 1.1 所示,模具用于生成所需形状的蜡图案。用一种耐火材料锆石,然后是陶瓷浆料,最后是粘结剂来包覆这种模具,这种模具是在烤箱中缓慢烧制而成的。蜡被熔化,金属在陶瓷模具中铸造成型。然后销毁该模具以移除铸件。过程通常称为“失蜡”过程
制壳是熔模精密铸造过程中最为核心的内容,其主要工序和工艺为[1]:
(1)模组清洗:为了使蜡模能够在涂料中被完全润湿,需要将蜡模表面的油污彻底洗去,将蜡模放入去油污的蚀刻液中,大概三秒后再放入清洗液中,如此重复到次,清洗完后用气枪吹干。
(2)涂料配制:蜡模制壳时,每一层的作用不同,每层所用的涂料也不相同,主要性能指标包括涂料粘度和密度,涂料配置完成后,要保持环境温度,并使涂料处于搅拌状态中。
(3)制壳:这是整个制壳过程的核心环节,将已经清洗完毕的模组,以与竖直方向大概30°的角度缓缓浸入配制好的涂料中,这样可以防止蜡模沟槽处产生气泡,待完全浸入后,涂料桶旋转或者模组左右上下晃动,以使涂料能更好的完全润湿模组,涂料完成后可以进行淋砂。
(4)型壳干燥与硬化:模组完成涂浆淋砂工艺后需要在干燥的环境下干燥,使粘结剂固化,干燥的时间由环境的温度和风速决定。
(5)脱蜡:型壳干燥硬化后接下来需要脱蜡,将型壳放在蒸汽发生器中,内部压强保持在到个大气压之间,大概在到分钟内完成脱蜡,脱蜡完成后的型壳需要检查修补,出现碎片、成片剥落的只能废品处理。
1.2 国内外研究现状
精密铸造行业是一个相对劳动密集和技术密集的行业,很多工序如制壳、焙烧、浇注、清理及打磨等工序劳动强度高,环境恶劣,同时操作技能也高。手工操作制壳的生产方式,尽管在操作规程中进行了严格要求,但在生产过程中仍存在一定的问题,具体有[2]:
(1)手工操作制壳时,生产操作过程中沾浆和淋砂的力度以及时间的控制均匀性和一致性差,会导致型壳质量的统一性很难控制。
(2)由于精铸产品大多是批量生产,因此在制壳过程中随着工作时间的加长,操作者操作的动作规范性会逐渐降低,间接会导致制壳过程中看似简单的旋转动作离标准要求越来越远,最终导致型壳涂挂一致性极差。
(3)尽管近年来随着工艺技术水平不断提升,精密铸造制壳车间环境大大改善,但制壳过程中不可避免的粉尘及气体仍局部存在,对手工操作工人身体健康仍存在潜在危害风险。
因此,工业机器人在熔模精密铸造生产线上得到广泛应用是很有必要的,在熔模精密铸造领域应用工业机器人,保证了产品的质量稳定性和可控性,同时大大降低工人的劳动强度,提高生产效率,保证了产品质量的一致性和稳定性,降低了生产成本。
1.2.1 国内研究现状
我国相关制造业的发展滞后,规模还不大,高附加值精密铸件的市场还在成长中。低端的民用市场依旧是我国精铸行业主要面对的市场,中国熔模精密铸造行业的生产装备水平跟发达国家相比,仍存在着较大的差距。具体到每一道工序,例如制作蜡模、制壳的制备,发达国家已有了新的生产方式,我国还停留在初期的加工模式。并且工艺设备的自动化、智能化水平也存在明显差距,从而导致了这种局面不可避免的出现。生产效率不仅不高,产品的质量和数量也不能得到保障。对于某些涉及到国防的军工产品,因为加工技术的不过关,最终的产品达不到生产预期,使得某些技术迟迟不能突破,我国熔模铸造的装备水平急需提高。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
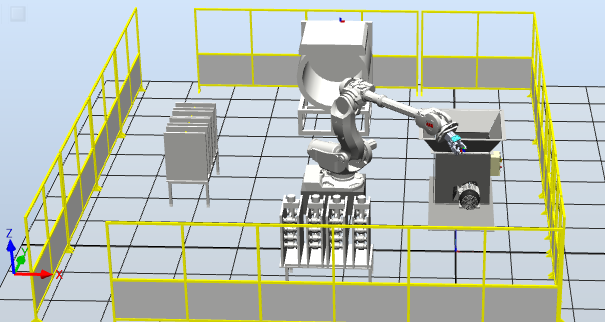
相关图片展示: