高性能电驱动柔性驱动器设计毕业论文
2020-04-10 17:00:20
摘 要
柔性驱动器在实际中有许多不同的潜在应用,目前在柔性驱动器的发展中迫切需要新驱动材料和具有简单制作及高驱动性能的驱动器。作为电活性聚合物驱动器一个重要分支,利用两层材料热膨胀系数差异产生的应变不匹配的电热双晶驱动器已经得到了广泛的研究。在本文中,通过引入高导电的Ag材料和柔性材料PDMS及PI,首先构造了性能可靠的柔性加热器,在此基础上设计了高驱动性能的柔性PI/Ag/PDMS电热驱动器。该驱动器具有低电压驱动、大弯曲变形、快速响应、可控性及制作简单等优点,当电压为1.9V时,在16秒内弯曲曲率可以达到2.1cm-1,驱动性能明显大于其他的电热驱动器。为了证明该柔性驱动器的潜在应用,设计了一个可以逼真的模拟人手的抓取动作的柔性机器人抓手和两指夹手。通过对该驱动器的进一步的优化设计,可以应用到仿生、全柔性机器人、微纳米机电系统等领域。
关键词:柔性驱动器;应变不匹配;电热;高驱动性能
Abstract
Flexible actuators have many different potential applications in practice. At present, there is an urgent need for new actuation materials and flexible actuators with simple fabrication and high actuation performance in the development of the actuators. As an important branch of the electroactive polymeractuators, the electrothermal bimorph actuators which use the strain-mismatched resulting from the difference in thermal expansion coefficients of two material layers has been extensively studied. In this paper, by introducing highly conductive Ag materials and flexible materials PDMS and PI, a reliable and flexible heater is first fabricated. On this basis, a high-performance flexible PI/Ag/PDMS electrothermal actuator is designed. The actuator has the advantages of low actuation voltage , large bending deformation, fast response, controllability and easy fabrication. When the voltage is 1.9V, the bending curvature can reach 2.3cm-1 in 16 seconds, and the actuation performance is obviously higher than other electrothermal actuators. In order to prove the potential application of the flexible actuators, a flexible robot gripper and two finger gripper were designed to realistically simulate the grabbing action of a human hand. Through the further optimization of the actuator’s design, it can be applied to the biomimetic, fully flexible robots, micro-nano electromechanical systems and other fields.
Keywords: Flexible actuator;strain-mismatch;electrothermal; high-performance
目录
第1章 绪论 1
1.1 柔性驱动器的研究背景、目的及意义 1
1.2 柔性驱动器国内外研究现状 1
1.2.1 柔性驱动器的驱动机理 1
1.2.2 电热柔性驱动器的国内外研究现状 3
1.2.3 电热柔性驱动器的材料研究 3
1.2.4 电热柔性驱动器国内发展动态 4
1.3 电热柔性驱动器课题研究内容及预期目标 5
第2章 电热柔性驱动器理论分析与计算 6
2.1 驱动器的位移、曲率计算及优化 6
2.2 驱动器的响应时间计算及优化 7
2.3 驱动器的效率计算 8
第3章 柔性加热器 10
3.1 加热器材料选择 10
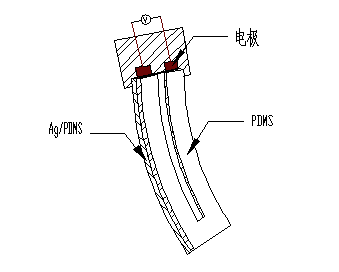
3.2 加热器的结构设计 11
3.3 加热器的制作 12
3.4 加热器性能测试 14
第4章 PI/Ag/PDMS柔性电热驱动器 16
4.1 PI/Ag/PDMS驱动器在直流电压下的驱动性能 16
4.2 PI/Ag/PDMS驱动器在交流电压下的驱动性能 19
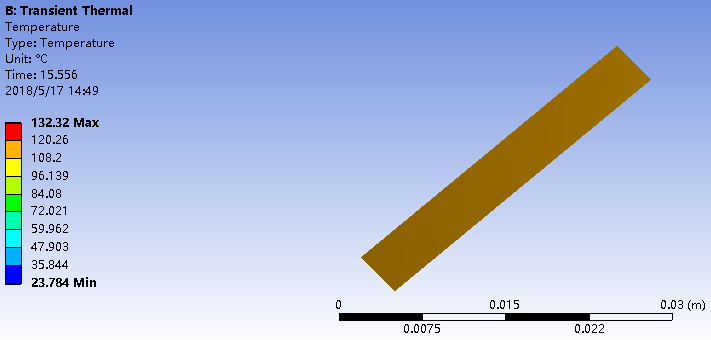
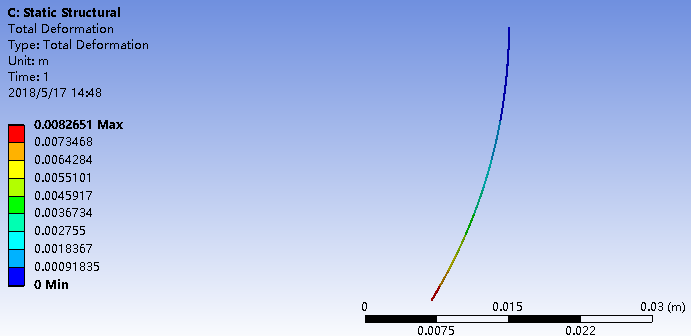
4.3 PI/Ag/PDMS驱动器的有限元分析 20
4.4 PI/Ag/PDMS驱动器的应用 21
第5章 实验 23
5.1 Ag材料的处理 23
5.2 sylgard 184 PDMS的配制 23
5.3 PVA的配制 23
5.4 Ag/PDMS加热器和PI/Ag/PDMS柔性电热双晶驱动器的制作 24
5.5 两指夹持器的制作 24
5.6 柔性电热驱动器的ANSYS仿真 25
5.7 PI/Ag/PDMS柔性驱动器的物理表征 25
总结 26
参考文献 27
致谢 29
第1章 绪论
1.1 柔性驱动器的研究背景、目的及意义
模拟爬行,游泳,跳跃和飞行等自然生物运动策略的软机器人的发展一直是一个长期的追求目标。不同于传统的机器人,传统的机器人是由刚性材料和机械部件制成的,以满足高精度,快速移动,高力和易于控制的要求。[1,2] 由具有多个自由度的柔性部件组成的柔性机器人可以以相对简单的方式完成复杂的运动,实现提高安全性、适应性和复杂运动的目标。此外,由于柔性机器人的灵活性,柔性机器人可以更好地处理微小的物体,抵抗机械损伤并适应环境。 作为柔性机器人关键部件,柔性的智能驱动器发挥着不可或缺的作用。[3,4]
柔性智能驱动器可将光[1,4,9,13]、电[1-3,5-8,10,12,14,16]、热[1-16]、湿度、气压[17]等外部能量直接转化为驱动器自身的形状变化,它不需要通过复杂的能量变换元件,并且可在外部刺激消除后自动恢复到初始状态,受到了国际学术界、产业界的密切关注。在过去的几十年中,柔性驱动器已经得到了广泛的研究,对于当前研究比较广泛的两层结构柔性驱动器来说,也已经实现了包括弯曲和扭曲在内的多种变形形式,其应用研究也已延伸到人造肌肉、开关、爬行机器人、传感器、仿生、操纵器及微纳米机电系统等领域。[1-16] 然而,对简单结构、经济制造、快速大变形、多刺激源响应以及模拟复杂生物运动如飞行和跳跃的柔性驱动器的研究仍然面临挑战。
在柔性驱动器的发展历程中,对于大多数报道的驱动器(不限于电热驱动器),所产生的弯曲角度或曲率相对较小(通常曲率小于1cm -1 )及驱动电压相对较高,这可能会限制柔性驱动器的实际应用。尽管这些传统的机电致动器材料在一些驱动性能方面表现出色,如可复制天然肌肉的某些重要特征(响应速度,位移和可控性)及仿生应用(包括类昆虫运动,飞行机器人和类似鱼的驱动器),但是,它们在其他领域可能仍然不能令人满意,这可能会限制其实现复杂和多种形式的运动。迄今为止,驱动电压高、变形小、响应时间长等缺点仍然是传统机电驱动器的许多实际应用的重大障碍。因此,研究一种具有成本低、易于制造、轻量化、响应时间短、变形大、产生的应力高、驱动电压低以及更通用的操作环境的整体优异性能的柔性驱动器是一个不容置疑的发展趋势。
1.2 柔性驱动器国内外研究现状
1.2.1 柔性驱动器的驱动机理
目前,柔性驱动器的驱动机理主要有以下几种:
(1)相变驱动。相变材料为传统的机电致动器提供了一种有吸引力的替代方案,这种材料依赖于在相变温度下发生快速膨胀所产生的机械力。相变的典型材料例子之一是石蜡,其热机械性能在20世纪30年代早期首次应用于温室中的自我调节通风口。石蜡基执行器在其应变保持在10%体积的改变下,可以提供大的力量。通过利用可逆的液 - 气相转变可以获得更高的膨胀应变,但是这种材料系统传统上难以控制。许多装置在弹性体气球内部或薄膜之间使用截留的液体来形成膨胀腔,利用液体的液体 - 气体转变的软弹性体膜的电触发变形来产生大的面积膨胀,如在弹性体基底中加入乙醇,通过乙醇的液气相变可以产生较大的变形。然而,因为其复杂的内部结构设计,这样的装置对于制造和形成任意形状是具有挑战性的。例如,直接投射或3D打印这些致动器是很困难的。[11]
(2)气压和液压驱动。气体驱动是以空气压缩机为能量源,以压缩的空气为运行介质,进行信号和能量传送的一门工程技术,是实现各种驱动控制、自动控制的关键技术手段。由于空气的可压缩性较好,气动柔性驱动器可以实现更高的柔顺性,同时,气动柔性驱动器还具有易于控制、结构简单、动作平滑、噪声低、无污染以及对控制目标的机械损伤较小等优点。如在划有缝隙的薄聚丙烯管装入气囊,然后施加气压可以实现弯曲、扭曲、收缩、膨胀等单一或者组合的多种运动形式。[17] 对于液压传动系统控制的驱动器来说,其主要职能是传递动力和运动,液压动力和信号控制是其主要构成模块。基于液压驱动系统的驱动器不仅具有轻质、占用空间小、快速响应的特点,而且还具有精准度高和驱动力量大等优势。虽然基于液压和气动流体弹性体的驱动器具有许多优点和实际应用,但是,他们需要外部压缩机和压力调节元件进行辅助控制,这在一定程度上限制了它们的小型化和实际应用。
(3)光驱动。在自然界中,光能源是无穷尽的、无污染及高安全性的。光是一个多参数可调的刺激,其单色性,波长,强度,偏振和照明位置可以精确调整,以操纵驱动器。 此外,由光引起的驱动器与由其他刺激所控制的驱动器不同,光驱动具有提供远程,非接触式和非电磁干扰以及生物组织渗透操作的显着优点。[13] 他们卓越的优势使得可以通过去除复杂的部件和减小尺寸来简化驱动器装置成为可能。到目前为止,光驱动的能量转换途径包括光化学致动、光热致动、光电致动和辐射压力致动。对于光驱动来说除了能量转换途径之外,材料结构组装也是一个关键因素,因为其可以实现由纳米尺度的光诱导效应转化为宏观变形,这对于实际应用是有用的。此外,包括膨胀(收缩),弯曲,扭曲和旋转等多种复杂的宏观运动也取决于光致动器的结构组装。因此,能量转换和结构组装方法对光致动器设计都至关重要。[9]
到目前为止,大量的光致动器领域的研究主要集中在光化学和光热效应的驱动上。 然而,大多数现有的研究都汇集在光化学致动器上,其中心设计思想侧重于光响应有机分子的结构设计和优化。在光驱动器的研究中,材料主要集中在液晶弹性体(LCEs)和有机分子晶体(OMCs)上。它们都可以进行光诱导分子异构化,在各向异性分子组装时能够积累分子尺度变形和宏观体积变形。尽管由于对上述材料的研究而取得了显着进展,但也存在难以进行分子设计,合成和组装等问题,因此仍需要进一步的探索和研究以及新材料的开发。[13]
(4)电驱动。通过电阻率较小的能量转换元件(Ag、CNT、石墨烯等),将电能转化为热能,然后利用材料热膨胀系数的差异将热能转换为机械能并实现电热驱动。其采用的材料主要有金属、金属氧化物、电活性聚合物及碳纳米材料等。[1-16]
(5)光电复合驱动。单独的光或者电进行驱动的驱动器在实际应用中会存在一定的限制。光电复合驱动器可以实现更加高级的运动,在实际中会实现更多和更复杂的应用。因此,开发具有对多种刺激响应和对各种仿生应用进行多种复杂运动输出的新型复合驱动器对于驱动器的发展具有重大意义。[1]
1.2.2 电热柔性驱动器的国内外研究现状
在电驱动机理中,电活性聚合物致动器(EAP)由于其轻便,灵活和低成本的特性而得到了广泛的研究和应用。根据它们的驱动机制,它们大致可以分为两类:离子型和场激活型。在离子型分类中,致动器主要在使用液态电解质的电化学系统中致动,并且驱动电压相对较低。 然而,致动主要仅出现在电解质溶液中,由于要求液体电解质的高标准安全封装,这在实际应用中存在许多的不便。在场激励分类中,介电弹性体驱动器具有应变大,快速响应,能量密度高等诸多优点。然而,由于介电弹性体相对于陶瓷的介电常数较低,因此通常需要较高的施加电场(高达1.28〜10 8 V / m)来驱动,这在实际应用方面受到了严重限制。[3,5,6,7]
在驱动器的各种类型的激励中,电是比较容易和便利的一种刺激源。最近,电热驱动器(ETA)正在逐渐吸引许多研究人员的兴趣,因为它们不含电解质,操作简单,可在空气中稳定运行。更重要的是,它们具有低驱动电压的高性能驱动,克服了电子EAP驱动器中高电压要求的缺点。[3,7] ETA是基于柔韧电极和聚合物的柔性设备,通过电流或光加热能够产生大变形。在电驱动研究发展过程中,ETA有两种类型。 一种是均匀的导电复合膜,可以随着温度的变化而变化,如当温度升高时,复合膜的长度增加。 另一种类型是双层复合膜或三层复合膜,由柔性电极和热膨胀系数(CTE)差别很大的聚合物制成。当电流或光加热时,双层驱动器可弯曲到热膨胀较小的一侧。[1] 对于这两种类型的驱动器,在驱动性能上还没有达到最佳,需要从材料和工艺上进行进一步的研究和开发。
1.2.3 电热柔性驱动器的材料研究
为了实现柔性驱动器的各种复杂的应用,人们致力于构造结构简单,响应速度快,动作大,运动输出复杂的模拟生物运动的电热软驱动器。对于电热柔性驱动器的设计,材料部件是决定驱动器驱动性能的关键成分之一。[1] 双晶片电热驱动器作为EAP驱动器的一个重要分支,其典型的混合结构是由具有不同热膨胀行为的两层材料组成 ,这些材料层可以在外部刺激下由于不对称热膨胀而产生弯曲位移。因此,所使用两个材料层之间的热膨胀系数(CTE)的不对等会对驱动性能产生决定性的影响。[6,16]
传统使用的双晶片驱动材料包括金属,金属氧化物和硅,其中大部分具有正CTE(在加热时扩展)。但是,它们通常用于微米级或纳米级致动器,并且所产生的位移受其CTE差异相对较低的限制。[16] 此外包括形状记忆合金和压电陶瓷在内的许多无机材料也已被评估为驱动器材料,然而高工作温度和电压限制了它们的应用范围。另一方面,基于介电弹性体,共轭聚合物和聚合物凝胶的软致动器具有诸如柔软性、质量轻和光学透明性等优点。然而,响应速度慢,寿命周期短以及低能量转换效率也限制了聚合物驱动器的性能。[5] 更重要的是,它们的制造方法存在困难。因此,迫切需要探寻新的驱动性能杰出的驱动材料。
在电热双晶驱动器当前的探究中,其使用的材料涵盖碳纳米管(CNT)、石墨烯和聚合物复合材料等。包括碳纳米管(CNT)和石墨烯在内的碳纳米材料具有显着的柔性、光学、热学、电学和机械性能,已被视为柔性致动器的有发展前景的材料候选者。[1,3,5-8,10,12,14-16] 目前已经制造了基于CNT或石墨烯的各种类型的致动器,以展现包括快速响应和大的机械变形的高性能驱动。在之前的研究中,已经有几种用碳纳米管制作的热驱动器。例如,通过在多壁CNT的侧壁上沉积薄金属氧化物或金属薄膜而开发用于热致动的纳米级三晶型或双晶型器件,以及由垂直排列的CNT阵列和聚合物复合材料制成的微型悬臂梁驱动器。[5] 尽管如此,宏观上基于CNT的具有优良驱动机能的驱动器依然很少见。此外,由于负CTEs的独特性质,石墨烯及其衍生物也是ETA的合适候选材料,目前包括石墨烯/环氧微驱动器、石墨烯/氧化石墨烯驱动器、海绵石墨烯驱动器、海绵石墨烯/ PDMS驱动器等在内基于石墨烯的驱动器已经被研究出来。[7]
碳纳米管(CNT)和石墨烯通常用于软电热致动器中作为引入温度变化的加热器(通过焦耳加热)。然而,CNT或石墨烯加热器的相对高的电阻增加了驱动电压。[3] 这些电热驱动器中的大多数在几十伏下工作,除了极少数例外。 高压使得这种驱动器除了引起安全问题之外,还对实际应用带来挑战。因此开发高电导率、耐高温的柔性材料以提升柔性驱动器的驱动性能是非常重要的。
1.2.4 电热柔性驱动器国内发展动态
柔性智能驱动器是一个新兴的研究方向,在他的发展过程中仍然具有许多的挑战。相对于国外而言,我国在柔性驱动器领域的发展虽任重而道远,但也取得了不错的进展。据国内媒体报道,近期,中国科学院苏州纳米研究所与合肥工业大学合作,共同研究和开发出了一种仿效人弹手指动作的新型光驱动跳跃仿生机器人。这种跳跃式机器人在受到太阳光照射后,可以向上跳跃并且高度大于自身高度的 5 倍,同时在空中做出类似翻滚的动作,受到了国内外的广泛关注。[1] 因此,为推进我国柔性驱动器等方面的研究进展,应借鉴国外柔性驱动器发展的先进经验,力争在柔性驱动器的发展上有重大突破。
1.3 电热柔性驱动器课题研究内容及预期目标
柔性驱动器在柔性电子系统、软机器人系统等领域拥有巨大的应用前景。本此毕设拟利用电-热-机械驱动原理设计并制作柔性驱动器,然后将多组柔性驱动器以一定的方式组合,制作出一些简单柔性机器人。通过合成和选择电热柔性材料、具有不同热膨胀系数的柔性驱动材料层,以及图案化工艺,实现电-机械驱动器以及柔性机器人的制作。
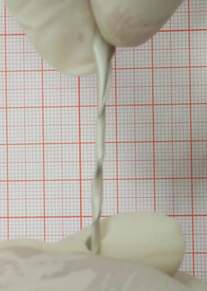
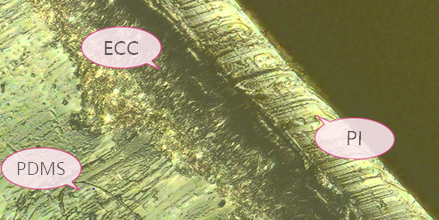
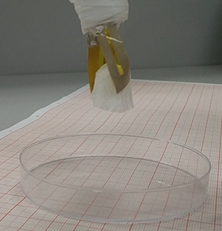
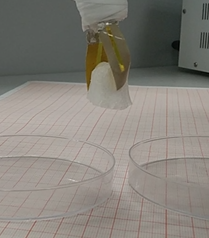
在本文中,通过将银(KI溶液处理)、PDMS、PI结合在一起,设计了一种高驱动性能的柔性电热驱动器,基本实现了低驱动电压、大弯曲变形、简单经济以及快速响应的性能要求。当施加1.6V的低电压作用20s,这种驱动器的弯曲曲率可以达到1.4cm-1,当施加1.9V的电压作用16秒时,驱动器的弯曲曲率可以达到2.1cm-1,这一性能明显优于其他的同类型的双晶电热驱动器。驱动器的优越的驱动性能归功于银材料的高导电性、加热器在弯曲过程中的可靠性、PDMS和PI的热膨胀系数的巨大差异以及所使用材料的高温稳定性和柔软性。通过丝网印刷和旋涂的方法即可完成加热器和驱动器的制作,这种方法具有制作简单和成本低的特点。当交流电施加在驱动器上时,可显示出可逆的摆动。这种具有良好驱动性能的电热双晶体驱动器的设计可以为多功能高度仿生设备和全柔性机器人的发展建立基础,作为演示,精心设计了一个将驱动器作为手指的两指机械夹手和单臂抓手,它可以在低电压激励的情况下实现对微小物体的快速抓取,并且抓取的重量是自身重量的2.5-3倍。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: