蠕动排水管道检测机器人运动机构设计毕业论文
2020-04-08 14:25:33
摘 要
排水管道在长期使用过程中不可避免的会受到污水污物的腐蚀和内部自身的老化问题,这会造成管道的堵塞、破损、泄露等诸多问题,进而会损害人们的财产安全,因此定期进行排水管道检测维修必不可少。而人工检测操作困难,效率低,甚至会给检测人员的健康带来严重危害。管道机器人正好可以解决这一棘手的问题,它的出现极大地解放了劳动了,所以对排水管道检测机器人的研究具有重大意义和应用前景。
本文针对城市排水管道检测,提出了一种蠕动式的管道检测机器人,并做了如下研究工作:
(1)在参阅了大量管道检测机器人的文献后,对比了不同类型机器人各自的特点和不足,并简要介绍了国内外管道检测机器人的结构方案;
(2)系统地分析了管道检测机器人的功能,其中包括运动功能和检测功能;
(3)研究了蠕动运动机理,对夹紧机构和支撑机构进行了方案分析和选择,详细地介绍了各个功能的实现方法并对主要零部件进行了分析计算。
关键词:排水管道检测 蠕动式机器人 运动机构设计
Abstract
In the long-term use of the drainage pipeline, it is inevitable that it will confront the corrosion of the sewage or pollutants and the aging problems in internal structure. Which can result in lots of problems in the pipeline such as clogging, breakage, leakage, and etc. Furthermore, it will make harm to the property safety of human beings. Therefore, it is essential to keep regular inspection and maintenance of drainage pipelines. However, the manual detection operation is always difficult and inefficient, and may even cause serious adverse effects on the physical health of the operators . Pipeline robots can solve this thorny problem perfectly, whose emergence has greatly liberated labor. Consequently, there is great significance and application prospects for the research of drainage pipeline inspection robots.
In this article, we proposed an idea of the peristaltic pipeline inspection robot and the main research content are as follows:
(1)Comparing the characteristics and deficiencies of different types of robots and introducing the structural schemes of pipeline inspection robots at home and abroad briefly after reading a large number of references on pipeline inspection robots.
(2)Analyzing the functions of the pipeline inspection robots systematically , which includes the movement function and the detection function;
(3)Discussing the peristaltic motion mechanism , developing the way how to evaluate and select clamping mechanism and supporting mechanism, describing the realization method of each function in detail and calculating the main components.
Keywords: Drainage pipe inspection, Peristaltic robot, Motion mechanism design
目录
摘 要 3
Abstract 4
第1章 绪论 1
1.1 课题研究的背景和意义 1
1.2 管道机器人国内外研究现状 1
1.3 论文内容安排 5
第2章 排水管道检测机器人功能分析 7
2.1 拟达到的技术指标: 7
2.2 功能分析 7
第3章 蠕动式管道检测机器人总体结构设计 9
3.1 管道检测机器人运动方式对比 9
3.2 蠕动机器人运动原理 10
3.3 总体运动机构设计 11
3.3.1 整体尺寸设计 11
3.3.2 伸缩机构方案设计 11
3.3.3 夹紧机构方案设计 12
3.3.4 驱动机构方案设计 17
3.3.5 总体机构方案设计 18
3.4 蠕动机器人功能实现方法分析 18
第4章 主要零部件的设计计算 20
4.1 滚珠丝杠螺母的设计计算 20
4.2弹簧设计计算 21
4.3电机功率计算 21
第5章 总结与展望 23
5.1主要结论 23
5.2研究展望 23
参考文献 24
致谢 25
第1章 绪论
1.1 课题研究的背景和意义
排水管道系统是城市必不可少的基础设施之一,用于汇集、运输和排放生产生活中产生的污水、工业废水以及自然界的雨水等,从而保证人们的生产生活环境干净、舒适、安全,可以说,城市的排水管道系统是一个城市水污染防治、城市排渍、排涝以及防洪的重要设施。然而由于排水管道在长期使用过程中不可避免的会受到污、废水的侵蚀和内部自身的老化问题,日积月累,这些问题势必会造成管道变形、破损、结垢甚至是堵塞和泄露,这不仅会影响管道的正常使用,甚至会使城市遭受污染和内涝之灾,造成重大的财产损失。因此,必须对管道进行定期检查和维修以及时发现和解决管道问题。
传统的管道检测方法有两种:一种是由相关人员携带设备进行检查,这种方式不仅受限于管道尺寸,而且操作十分困难,对工作人员的操作技术要求高,同时由于管道内残存的废气废水,会造成工人健康的严重损害;另一种常见的方法是工程量巨大的人工开掘检测发,该方法效益很低,而且往往会有碍于道路交通。可以看出,传统方法费时费力,而且都是随机检测,漏检的概率大。因此,十分有必要研制一种自动装置,能够进入到管道内部,对排水管道系统进行完整的高效的检测。
管道机器人正好可以解决这一棘手的难题。管道机器人是管道机器人是集驱动技术、传感器技术、控制技术以及信号处理技术与一体,可携带操作机械沿着管道的内部或者外部行走并在计算机自动控制或者人员操作下进行管道作业的机电一体化设备[1]。利用管道检测机器人代替人工检测排水管道有以下几点优势:第一,管道检测机器人尺寸小,可以进入人无法进入的细小管道中进行检测;第二,排水管道中存在大量淤泥、污物以及有毒气体和可燃性气体,利用管道机器人进行检测,保证了作业安全及卫生;第三,管道检测机器人运动灵活,速度可调,而且作业时直接进入管内不同进行大量开掘,保证了检测的效率;第四,管道检测机器人驱动力大,可携带各种检测设备,既可以对区域管道进行全面检测排查又可以只对目标管道进行精准定位检测,准确率高,可靠性强。目前,管道检测机器人已经受到各国重视,具有非常大的市场需求,因此,对于管道机器人的研究具有重大意义。
1.2 管道机器人国内外研究现状
管道内检测机器人根据其运动是否可控可划分为主动运动机器人和被动运动机器人两大类,被动方式即管道猪[2]。主动运动机器人携带的驱动源,有自主行走能力的能力,而且可以控制自身的速度和方向。除此之外,还能携带检测装置,从而可以很好地用来进行管道检测和维修。目前主要的主动运动机器人有履带式机器人、轮式机器人、蠕动式机器人、螺旋式机器人和腿式行走机器人。
 图1-1展示的清华大学研究人员制作的是一种管道猪模型[3]。这个机器人能实现能源自给,这是因为它能自动调节节流口开度而实现介质压差以获得能量,另外它还能将流体能量转变为电能,来供给检测装置。
图1-1展示的清华大学研究人员制作的是一种管道猪模型[3]。这个机器人能实现能源自给,这是因为它能自动调节节流口开度而实现介质压差以获得能量,另外它还能将流体能量转变为电能,来供给检测装置。
图1-1 能源自给式管道猪
 图1-2展示的是加拿大INUKTUN公司生产的履带式管内机器人[4]。从图中可以看出该机器人采用双履带结构,而且两履带的夹角可以调整其特点是履带间的夹角可以调节,在管道中行走时,调整履带夹角即可适应不同管径,在平地上运动时,两履带平行。
图1-2展示的是加拿大INUKTUN公司生产的履带式管内机器人[4]。从图中可以看出该机器人采用双履带结构,而且两履带的夹角可以调整其特点是履带间的夹角可以调节,在管道中行走时,调整履带夹角即可适应不同管径,在平地上运动时,两履带平行。
图1-2 双履带机器人
 图1-3展示的是上海交通大学陈宗尧等研制的履带式管内机器人[5]。利用履带机器人在越障方面的优势,该管道机器人适用在核工业管内的检修。机器人整体采用关节履带式机构,机身前后各有一组履带,前后履带臂具有辅助越障的功能。遇到障碍物时,通过前后履带臂与中间驱动履带的位置协调配合完成越障动作。机器人的越障能力取决于前端履带臂能否达到障碍物的高度,并与电动的转矩有很大的关系。
图1-3展示的是上海交通大学陈宗尧等研制的履带式管内机器人[5]。利用履带机器人在越障方面的优势,该管道机器人适用在核工业管内的检修。机器人整体采用关节履带式机构,机身前后各有一组履带,前后履带臂具有辅助越障的功能。遇到障碍物时,通过前后履带臂与中间驱动履带的位置协调配合完成越障动作。机器人的越障能力取决于前端履带臂能否达到障碍物的高度,并与电动的转矩有很大的关系。
图1-3 关节式履带机器人
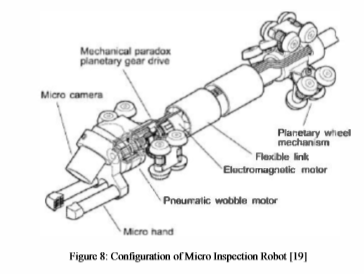 图1-4展示的是由Suzomori等人开发的微型轮式管道检测机器人[6]。该机器人用于1英寸管道检测,功能性和实用性很强。该原型配备了410,000像素的彩色CCD摄像机,可以提供足够的分辨率,以便在管道内表面找到小至11微米的微裂缝,并且拥有一个具有六个自由度的双手系统,用于爬行运动。
图1-4展示的是由Suzomori等人开发的微型轮式管道检测机器人[6]。该机器人用于1英寸管道检测,功能性和实用性很强。该原型配备了410,000像素的彩色CCD摄像机,可以提供足够的分辨率,以便在管道内表面找到小至11微米的微裂缝,并且拥有一个具有六个自由度的双手系统,用于爬行运动。
图1-4 微型轮式管道机器人
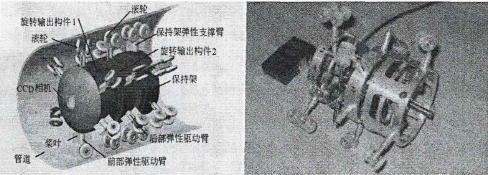 如图1-5是由中科院沈阳自动化研究所的李鹏等人研制的轮式机器人[7]。该机器人有适应管道功能。通过对传动机构的优化设计,采用螺旋驱动减少电机数量,同时使控制简单。该机器人配备CCD相机,能够在气体或半气体半液体的环境中作业,另外在轮腿部分加装桨叶可提供额外驱动力。正常运行时,各部分滚轮均接触管壁,通过前部驱动臂旋转前进;遇到障碍时,机器人的前后驱动臂传动比发生改变,后驱动臂产生更大的驱动力促使前驱动臂越障。通过对机器人保持架优化设计进一步提高整体的越障能力和运动稳定性。通过实验发现,这种螺旋驱动轮式机器人能够在直径90mm和180mm的管内正常移动,并且可顺利越过管内的同也台阶阻碍。
如图1-5是由中科院沈阳自动化研究所的李鹏等人研制的轮式机器人[7]。该机器人有适应管道功能。通过对传动机构的优化设计,采用螺旋驱动减少电机数量,同时使控制简单。该机器人配备CCD相机,能够在气体或半气体半液体的环境中作业,另外在轮腿部分加装桨叶可提供额外驱动力。正常运行时,各部分滚轮均接触管壁,通过前部驱动臂旋转前进;遇到障碍时,机器人的前后驱动臂传动比发生改变,后驱动臂产生更大的驱动力促使前驱动臂越障。通过对机器人保持架优化设计进一步提高整体的越障能力和运动稳定性。通过实验发现,这种螺旋驱动轮式机器人能够在直径90mm和180mm的管内正常移动,并且可顺利越过管内的同也台阶阻碍。
图1-5 螺旋轮式机器人
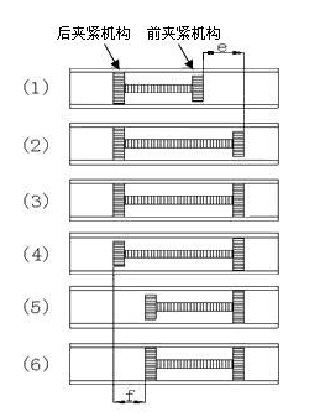
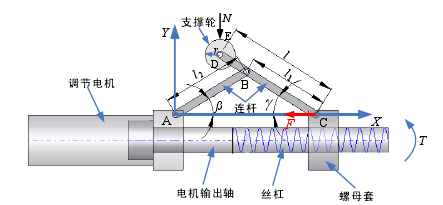
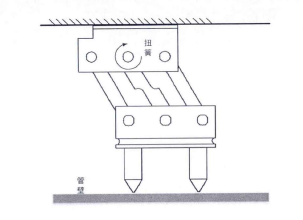
图1-6所展示的两个机器人是由北京邮电大学年四成等人所研制的类蠕动管道机器人[7](如图1-6a)和具有大扭矩特性蠕动式管道机器人[8](如图1-6b)。其中类蠕动式管道机器人的运动原理是借鉴蠕动运动机理而形成对的一种周期震荡式运动。它由前部支撑单元、中间弹簧轴以及后部涡轮蜗杆驱动单元组成,具体运动过程为,后部驱动单元持续运动,经过中间弹簧轴的周期性伸缩传动至前部支撑单元,从而完成整个类蠕动过程。该机器人可以再垂直管壁爬行并且可以通过U型等弯道,前部可搭载检测装置进行检测。具有大扭矩特性的管道机器人同样采用蠕动运动机理,由电机驱动滚珠丝杠进行轴向位移,弹簧机构进行支撑,由曲柄滑块演变的扭簧机构进行夹紧。这两种机器人都适用于200mm的管径,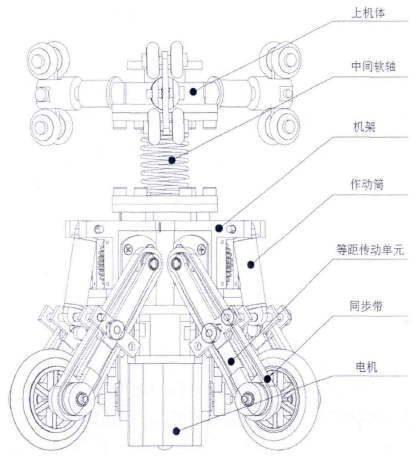 但是前者驱动力不去,且只能单向运动,后者不能转弯。
但是前者驱动力不去,且只能单向运动,后者不能转弯。
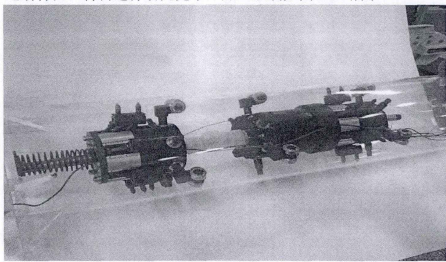 图1-6a 类蠕动机器人
图1-6a 类蠕动机器人
图1-6b 具有大扭矩特性的蠕动式管道机器人
图1-7展示的是由Osuka 等人开发的螺旋式管道检测机器人SPRING[9]。作为一个管道检查机器人,它可以灵活地通过气体管道。研制过程中通过反复实验发现了两个主要问题。一是在接近管道段的弯道时, 机器人在快速减速后停止。这是由于前翅片被管壁堵塞, 因为机器人柔性不够。为了解决这个问题, 有必要重新设计身体的刚度,身体的锥度以及翅片的形状和排列。另一个问题是轮胎打滑导致机器人进入弯道时会被卡住,这是因为在进入弯道时, 车身表面和墙壁之间的夹角更大导致轮胎和墙壁不能接触。
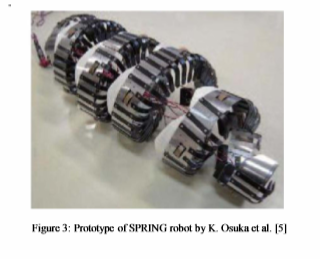 图1-7 螺旋式管道机器人SPRING
图1-7 螺旋式管道机器人SPRING
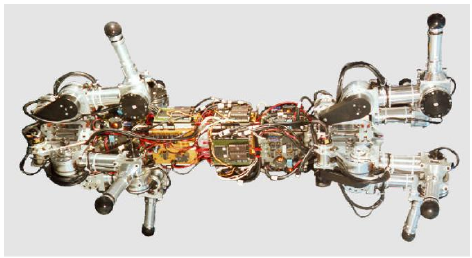 图1-8展示的是由慕尼黑大学研制的足式行走管道检测机器人MORITZ [10]。这个机器人有八条行走腿,上下各四条,以周向90度均匀排列,每条腿有两个活动关节,由直流电机驱动,机器人长月750mm,可以在直径600mm的管中行走。这个机器人可以从水平到垂直任意倾角的管道中行走,而且躯体还可以弯曲,非常灵活。但是另一方面,该机器人结构过于复杂,控制困难。
图1-8展示的是由慕尼黑大学研制的足式行走管道检测机器人MORITZ [10]。这个机器人有八条行走腿,上下各四条,以周向90度均匀排列,每条腿有两个活动关节,由直流电机驱动,机器人长月750mm,可以在直径600mm的管中行走。这个机器人可以从水平到垂直任意倾角的管道中行走,而且躯体还可以弯曲,非常灵活。但是另一方面,该机器人结构过于复杂,控制困难。
图1-8 多足行走式机器人
1.3 论文内容安排
本文将进行管道检测机器人运动机构的设计,会利用到SolidWorks和CAD等建模软件对机器人的结构进行进一步的具体化和详细化。全文共5章,论文具体的结构安排如下:
第1章为绪论,首先介绍了课题研究和开发的目的与意义,综述了管道检测机器人的国内外发展现状,最后说明了各章节的主要内容。
第2章主要对管道检测运动机构记性了功能分析,主要功能包括运动和检测功能。
第3章首先对比分析了管道检测机器人各种运动方式的特点,最终确定运动方式为蠕动式;之后介绍了蠕动运动的机理;接着对整体运动机构进行了模块化方案设计,确定了整体方案后再进行了问题分析并提出了解决方案。
第4章对主要零部件进行设计计算以及电机选型。
第5章主要是对以上研究结果进行总结和分析,得出所研究的结论和成果,并提出以后工作中所需要改进与解决的问题。
第2章 排水管道检测机器人功能分析
本课题所设计的管道机器人主要用于排水管道内部的检测。本章主要对管道内检测机器人的本体即运动机构进行功能需求分析。
2.1 拟达到的技术指标:
(1)适应管径:大于等于200mm;
(2)移动速度:大于等于30mm/s;
(3)驱动力:大于等于500N;
(4)结构简单化、易于控制。
2.2 功能分析
(1)有足够大的驱动力
毫无疑问,管道机器人最主要的任务就是检测管道或管道接口处的情况,这要求管道机器人要能配载多种检测装置。这就要求机器人有足够的驱动力去搭载这些装置,但在运动过程中机器人还需要克服各种阻力,主要为以下两个方面:
- 由于管道环境复杂,管道中会有很多污物甚至淤泥,同时拼接处还会存在很多接头和台阶,不光滑的表面无疑会增加机器人的前进阻力。
- 电源有两种供给方式,拖缆式的和无缆式的。拖懒式是指机器人在管道内运动过程中会拖着线缆一起运动,由于缆线落地,当机器人爬行的距离较远或遇到弯管时,线缆与与管壁的摩擦力势必会给机器人较大的阻力;当采用无缆方式,为了保证机器人的作业时间和作业距离,需要机器人自身携带容量足够大的电池,但同时也增加了机器人本体的重量,一样是增大了阻力。
总之,机器人运动过程中会遇到很多阻力,但是受限与管道环境,电机又不能过大,因此,选择效率高的传动方式十分重要。
(2)有良好的管径自适应能力
管道在制造、安装的过程中,肯定会出现瑕疵导致管径会有微小变化,同时管道内因为常年运输生化污水、废水,势必会对对管壁造成损害或是说形成不规则凸起,就需要机器人有一定的自适应性,避免管道机器人卡死在管道中,造成堵塞等严重后果。
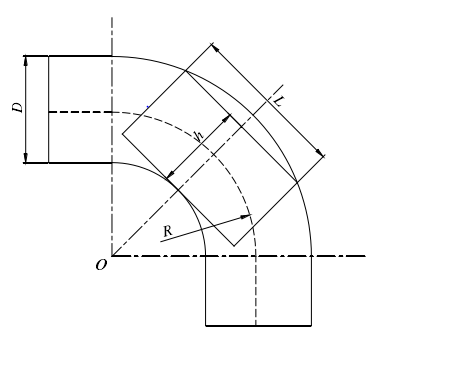
(3)有良好的过弯能力
城市管网系统错综复杂,存在着大量U型、T型以及十字型接口,为了使管道检测机器人能检测更准确高效,过弯不可避免,那么过弯时就一定要保证三个要求:平稳过弯管、灵活适应接口管径变化、过弯后保持或是能及时调节本体姿态。为了满足这些需求,就需要管道检测机器人运动灵活,协调性好,尺寸合适既能保证电机数量和功率大小又能过弯,能适应微小管径的要求。
- 检测功能
检测功能是管道检测机器人必不可少的的一个功能,它是指能实时检测机器人的运动及工作情况,反馈给控制系统,根据需要对执行机构进行调整。可以看出,检测是机器人能自我调整完成指定动作的必要条件。这些功能由多种传感器组成的检测系统融合完成。需要检测的内容主要包括以下几个内容:
- 机器人的速度检测
当管道检测机器人在管道中运动时,必须时刻对运动速度进行控制。当遇到较大的阻力时,必须及时调整运动速度,以保证运动稳定,同时可以增大驱动力,这就要求地面操作人员能随时掌握机器人的实时速度来进行更好的控制。另外,对运动速度的随时监测还可以及时发现机器人运动的异常,从而进行调整或是检修。
- 机器人的倾角检测
检测机器人在管道中作业时,由于会受到各种环境变化,包括管道内部环境阻力和线缆拖动阻力,这些阻力合在一起可能会对机器人本体造成额外力矩作用,导致机器人倾角的变化甚至是翻转,这样会造成机器人对管道的检测失准,因此必须对管道机器人的倾角进行实时检测。
- 机器人的位置检测
管道机器人需要在距离弯道或是障碍物适当距离时就检测到其存在,并且检测出距离反馈给控制系统来调节机器人的运动状态。
由于本文主要研究的是管道检测机器人运动机构,所以不对外部检测(对管道状况的检测)进行说明。
第3章 蠕动式管道检测机器人总体结构设计
在分析了管道检测机器人的功能需求后,本章提出了一种蠕动式排水管道检测机器人,然后根据其功能需求以及蠕动式管道机器人行走特性,采用模块化的设计方法,综合比较每个机构对的各种实现方法,确定蠕动式管道检测机器人运动机构的总体方案。
3.1 管道检测机器人运动方式对比
在第一章绪论部分已经介绍了国内外研究人员研制的各类机器人。下面对各自的特点进行分析。管道内检测机器人根据其运动是否可控可划分为主动运动机器人和被动运动机器人两大类,被动方式即管道猪。主动运动机器人用携带的驱动源实现自主行走能力,其中速度和方向都可控,可以很好地用来进行管道检测和维修。目前主要的主动运动机器人有履带式机器人[11-12]、轮式机器人[13-14]、蠕动式机器人[15-16]、螺旋式机器人和腿式行走机器人。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: