光纤中继模块清洗平台的控制系统设计毕业论文
2020-04-08 13:22:19
摘 要
进入21世纪以来,全球的信息科学技术快速发展,大家想要的是更快的信息传输速度和更大的信息含量,因此接着就出现了3G、4G以及光纤通讯技术,并且它们在短短几年内飞速发展。这些技术已经慢慢的扎根人们的生活,大大的促进了社会的发展。
随着光通信技术的成熟,光纤模块的需求量日益增长。在光纤通信过程中,光纤模块是实现光电转换的关键器件,是必不可少的硬件构成[1]。现在的光纤模块有下面几种类型:光接收模块、光发送模块、光收发一体模块和光转发模块四种。在这之中,光收发一体模块是应用最为广泛的[2]。
在生产光纤模块的过程中,企业必须检测光纤模块的清洁程度,如果不合格则还需要对其进行清洗,除去光纤模块接口上的污渍,保证光纤模块接口达到规定的清洁程度。现今的检测和清洁过程,大多数是由人工来进行检测和清洁,这样的方式不仅浪费人力,工作效率非常低,而且工人们的标准互相不同,自己的标准也有浮动,所以对于光纤模块的产品质量来说是非常不利的。
根据以上所述的内容,本文设计了光纤模块清洗平台的总体结构和一套控制系统,该平台的主要功能是对光纤模块接口的清洁程度的检测,并对接口清洁程度不合格的进行清洗,使光纤模块的清洁程度达到企业所规定的标准。本次设计的论文主要内容包括以下几点:
- 光纤模块清洗平台的控制方案设计。基于光纤模块在各个工位上的顺序,设计出了一套控制方案。
- 光纤模块清洗平台的基本结构设计。根据设计出的控制方案,对每个工位的基本机构进行了简单的设计。
- 光纤模块清洗平台控制系统的硬件选择。通过计算机械手的各个运动的数据,对其相应的步进电机或气缸进行选型。
- 光纤模块清洗平台机械手的程序设计及仿真。根据整体的控制方案,画出机械手的梯形图,再进行编译和仿真。
关键词:光纤模块;清洗;控制系统;机械手
Abstract
Since the beginning of the 21st century, the global network technology has developed rapidly. People have higher and higher requirements for the speed and quantity of information transmission. The resulting is the emergence of 3G, 4G, FTTX, and optical communication technologies. Rapid development in time. These technologies have slowly taken root in people's lives and have greatly promoted the development of society.
With the maturity of optical communication technologies, the demand for optical modules is increasing. In the optical communication process, the optical module is a key device for realizing photoelectric conversion and is an essential hardware component. Today's optical modules have the following types: optical receiving modules, optical transmitting modules, optical transceiver modules, and optical forwarding modules. One of the most common is optical transceiver modules.
In the production of the optical module, we need to detect the degree of cleanness of the optical module and clean the unqualified ones, remove the stain on the interface of the optical module, and ensure that the interface of the optical module reaches the specified degree of cleanliness. Most of today's inspection and cleaning processes are detected and cleaned manually. This method not only wastes manpower and is inefficient. It is an important factor constraining the improvement of production efficiency, and the standards for manual inspection and cleaning are different and floating.It is not conducive to achieving effective control of product quality.
This article mainly aims at the above characteristics, has designed a control system and the basic structure of the optical module cleaning platform.It has realized the clean degree examination to the optical module interface, and cleans the light module that the degree of cleanliness does not reach the standard, and causes it to achieve the predetermined standard. The main content of this article is the following:
- Design of control scheme for optical module cleaning platform. Based on the order of the optical modules at each station, a set of control schemes was designed.
- The basic structure design of the optical module cleaning platform. According to the designed control scheme, the basic mechanism of each station is briefly designed.
- The hardware selection of optical module cleaning platform control system. By calculating the data of each movement of the robot, the corresponding stepping motor or cylinder is selected.
- Optical module cleaning platform manipulator programming and simulation. According to the overall control plan, I draw the ladder diagram of the robot, and then compile and simulate.
Keywords: optical module; cleaning; control system; mechanical arm
目录
第一章 绪论 1
1.1研究的目的及意义 1
1.2国内外研究现状 2
1.2.1 湿法清洗技术 2
1.2.2 干法清洗技术 3
1.3主要设计内容 4
第二章 光纤模块清洗平台的控制方案设计 5
第三章 光纤模块清洗平台的基本结构 8
3.1光纤模块清洗平台的总体结构 8
3.2上料工位结构 8
3.3加拔塞工位结构 9
3.4检测工位结构 10
3.5清洗工位结构 11
3.6上料机械手结构 12
3.7运料机械手结构 13
第四章 光纤模块清洗平台的控制系统的硬件选择 14
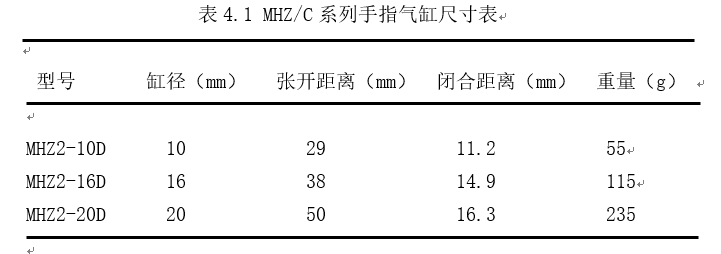
4.1手指气缸的选型 14
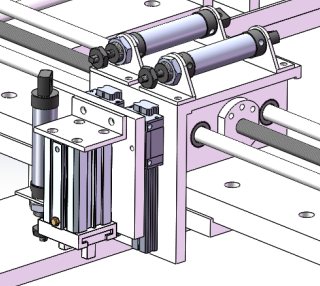
4.2上料/运料机械手的气缸选择 14
4.3步进电机的选型 15
第五章 光纤模块清洗平台的控制系统的软件设计 18
5.1 PLC选型及I/O接口分配表 18
5.2控制系统的PLC程序设计 19
5.2.1回原点程序 20
5.2.2取料/运料机械手原点指示 21
5.2.3手动程序 22
5.2.4自动循环程序 24
5.3控制系统的PLC程序的调试 24
第六章 总结与展望 26
6.1总结 26
6.2展望 26
参考文献 27
致谢 29
附录 30
第一章 绪论
1.1研究的目的及意义
21世纪以来,世界范围内信息化的发展的速度越来越快,大家通过网络办事的时候越来越多,而且大家越来越多的通过网络来传递信息和接触社会各界的信息。而光纤模块在光纤通讯中是极其重要的,所以在最近几年得到了社会的广泛关注。
在光纤通信的整个过程中,光纤模块中的光电转换是非常关键的步骤,所以自从我们开启研究和使用光纤通讯的时候,各大企业就一直在研究光纤模块。光纤模块的主要功能是电信号首先被转变成光信号,然后光信号再被转变成电信号,从而来完成对信息的传输[3]。但是因为在光纤模块的设计过程中,外界环境的影响必须要被考虑在内,光纤模块的传输效率会受到外界环境的很大干扰。所以为了使光纤模块工作的稳定性得到保证,以及信息的完整性得到保证,必须使光纤模块可以保持有稳定的输出。所以一般会设计一个控制电路在激光驱动器中,这个控制电路可以自动调节光纤模块的输出功率,让它的输出可以一直保持稳定,从而使光纤模块的稳定性和信息传递的准确性得到保障[4]。
但是说到光接收模块,光接收模块所收到的光信号是来自于激光发射器的。一样地,这种光信号拥有特定的码率,想要传达的信息就包含在这种光信号的码率里面。光接收模块收到这种拥有特定码率的光信号后,光信号里面的码率信息可以被光纤接收模块里面的光电检测二极管采集到,接着又被转变成电信号[5]。但是不能直接使用从光电检测二极管输出的电信号,在使用之前,电信号还需要通过放大电路被放大,然后这种光信号才能被我们使用。
光纤模块包括以下几个部分:光电子器件、功能电路和光接口[6]。而光电子器件主要包括了两个部分:发送部分和接收部分。在发射部分,光电转换可以把电信号转变成光信号,而且为了防止发送部分转换后光信号受到外界环境的干扰,所以发射部分的里面设计了一个自动控制光功率的电路,从而保证了光信号功率的稳定性。而接收部分主要有光探测二极管。光检测二极管可以辨认出输入的光信号,识别它所带有的信息,然后通过处理后又使得这些光信号被转变成对应码率的电信号,然后再对电信号进行放大处理,然后电信号才能被使用,信息的接收过程得以完成。

图1.1光纤模块实物图
光纤模块生产过程中的一个必要步骤就是光纤模块接口的检查操作和清洁操作。光纤模块接口可以被一个直径非常小的灰尘给遮挡住,以至于光纤模块的信息传输效率降低了很多。因此在生产光纤模块完成后,需要检查和清洗光纤模块的接收接口和发送接口的清洁程度,对检测不合格的光纤模块进行接口的去污处理,直至使其达到企业所规定的清洁程度。现今的检测和清洗方法大多是如下所述:检测人员通过摄像头来拍摄光纤模块接口的表面,通过肉眼来判对接口表面的清洁程度。如果其需要清洗,那么工作人员会用毛刷或着气喷枪等清洁工具对光纤模块接口进行清洗。但是随着社会各界使用光纤通讯的越来越多,光纤模块的需求量越来越大,这样的方式不仅浪费人力,工作效率非常低,而且工人们的标准互相不同,自己的标准也有浮动,所以对于光纤模块的产品质量来说是非常不利的。
根据以上所述,本课题对光纤模块的清洗平台进行了研究和设计,最终设计出一套清洗平台的控制系统。根据对光纤模块实际生产过程的观察,本文设计的清洗平台具有以下几个部分:上料工位、加拔塞工位、检测工位和清洁工位等四个工位,并设计了两个机械手(上料机械手和运料机械手)来完成光纤模块在各个工位间的来回运送,以此实现对光纤模块的准确检测和清洁,不仅使得光纤模块的生产效率得到了大大的提高,而且使得光纤模块的生产质量得到了保证。
1.2国内外研究现状
光纤模块是光通信的核心部件之一[7]。从最初我国的通讯技术冲破西方国家的垄断开始自主钻研,然后现在4G信息传输的兴起,以太网体系、安防体系和电力体系智能化等社会各界大大的提高了对信息传输的需求。但是国内外的这些技术都是对光纤模块的设计和测试技术,光纤模块在生产过程中的清洁程度检测和清洗技术的自动化集成程度并不高。但是光纤模块的检测和清洗等单体设备还比较成熟。
1.2.1 湿法清洗技术
湿法清洗技术是:在液体介质的环境下,通过一些外部的力,比如机械力或者电磁力等,需要被清洗的零件的表面被这些力作用,从而使得零件表面的污渍被除掉。湿法清洗被用在很多个方面,包括机械拭擦、手工清洗、高压水射流清洗和超声波清洗等。
机械拭擦是的工作过程是:把需要清洗零件被放进液体介质的环境中,通过产生的机械力,通过这些力使得污渍从零件表面被去除的方法。这种方法的原理和过程与以前的手工清洗大致上相同,它就是手工清洗的机械化的清洗方式,通过合理地利用机械装备,使得清洗的效率和质量提高了许多。这种方法不仅降低了工人的劳动力,而且对于手工清洗来说,机械拭擦的清洗方法可以通过调节机械设备的强度,使整个清洗过程中的强度要求能够保持预定的值,从而使零件表面的损伤可以大大的降低。
超声波清洗工作过程是:把需要清洗的零件置于液体介质的环境中,在液体介质中放入超声波,然后超声波使得液体介质产生高频率的振动,从而在液体介质中产生一些作用,比如加速度作用和空化作用。液体介质和零件表面的污垢收到这些作用的影响,然后污垢脱离零件表面,从而达到清洗的目的。
兆声波清洗和超声波清洗有几个共同的特点:这两种方式都是把需要清洗的零件放入液体介质的环境中,都是通过声波在液体介质环境中产生的一些振动作用对物体表面的污垢进行清洗。但是这两种清洗方式的原理完全不一样。兆声波清洗需要用的声波频率的范围是 500KHz—499GHz,在这种情况下,液体介质在声波中能够快速的运动,零件表面的污垢被产生的高速冲击波不断的作用, 从而完成清洗零件表面污垢的工作。
1.2.2 干法清洗技术
干法清洗技术是:在没有液体介质的条件下,直接产生作用力作用在需要清洗的零件的表面,使得污垢从零件的表面剥离开来,从而达到清洗的目的。
机械清洗的工作过程是:在外部机械力的带动下使得毛刷等清洗工具直接作用于工件一段时间,通过相互作用的摩擦力,使得污垢脱离待清洗的表面,从而达到清洗的目的。机械清洗技术的原理非常简单,同时也容易实现,但是一定要控制清洗工具和待清洗零件之间的摩擦力的大小,太大会导致零件表面的损伤,而太小会导致清洗的效果达不到。
高压气体冲喷清洗方式的工作过程是:在零件需要清洗的位置喷出高压气体,使零件在气体压力的冲刷下脱离零件,从而达到清洗的目的。与机械清洗方式对比起来,高压气体冲喷方式的特点是:零件的表面可以得到有效的保护,不会受到机械力的磨损,而且气体对零件表面对的作用非常均匀, 所以清洗的效果很好。 但是气体的控制是一个比较难的操作,所以这种清洗方法不适合结构复杂的零件。
如今有一种新型的、“绿色”的表面清洗技术——等离子清洗技术。它的工作原理是:通过等离子内部的高能粒子产生的活化作用,使得待清洗的工件表面的污垢发生一系列的物理反应或者化学反应,从而使污垢从零件表面脱离,达到清洗的目的。
1.3主要设计内容
- 了解目前国内外光纤模块清洗的研究状况和市场需求,并收集相关资料。
- 查阅资料仔细研究目前国内外电气设备控制系统的设计。
- 设计出光纤中继模块清洗平台的控制系统方案。
- 完成光纤中继模块清洗平台的控制系统硬件选型。
- 设计出光纤中继模块清洗平台的电气控制原理。
- 根据控制方案用编写出控制的PLC程序。
- 利用GX Works2软件对编写的程序进行仿真。
- 依据设计的结果利用AutoCAD软件画出光纤模块清洗平台控制系统的PLC外部接线图和电路图。
第二章 光纤模块清洗平台的控制方案设计
通过对光纤模块的生产过程的观察与分析,本次设计中设计了光纤模块清洗平台的四个部分,它们分别是上料部分、加拔塞部分、检测部分、清洗部分。上料部分的作用是利用取料机械手将光纤模块运送到加拔塞部分;而加拔塞部分的主要作用是拔出或者加装光纤模块的防尘塞;检测部分的主要作用是检测光纤模块的接口处的清洁程度并给系统反馈一个是否需要清洗的信号;清洗部分的作用是对光纤模块检测出的不合格产品进行清洗,使待清洗光纤模块的清洁程度达到企业预定的标准。
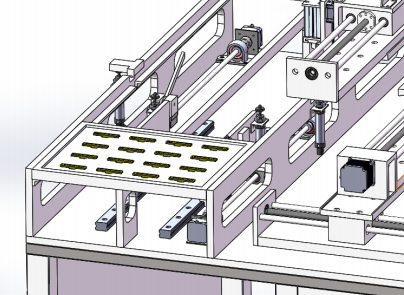
根据上面的这些分析,本文设计出的光纤模块清洗平台需要完成六道工序,分别是:上料工序、拔防尘塞工序、检测光纤模块接口的清洁程度、清洗光纤模块的接口、加装防尘塞工序和下料工序。又因为完成拔防尘塞和加装防尘塞的运动和所需要的机构几乎都一样,所以本文设计只用一个工位完成这两道工序。根据总的设计来看,本文设计的光纤模块清洗平台总共有四个工位,它们分别是:上料工位、加拔塞工位、检测工位和清洗工位。清洗平台的工作示意图如下图所示。
清洗纤光模块
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: