基于SMA弹簧驱动的仿尺蠖机器人结构设计开题报告
2020-02-10 23:09:08
1. 研究目的与意义(文献综述)
1.1.研究的目的、意义随着科学技术的不断进步,人们的生产、生活正在一步一步的走向实现自动化与智能化。这几年以来,机器人制造技术飞速发展,人们能在生活中中看到各种各样的机器人。这些不同种类的机器人在很大程度上提高了人们的生产效率,而且在作为多个学科技术的综合,机器人在工业以外的如航天、海洋探测、国防、家庭服务、医疗服务等领域,有着广泛的发挥和作用。而爬行机器人对环境有良好的适应性,可以代替人类或者帮助人类执行一些任务,特别是一些人类不方便进入或者极度危险的情况下,比如在一些狭窄的管道、坑道或者废墟中,人们往往需要完成检测、搜索等任务,但是由于体积的限制,人类难进入这些环境,而且在这些环境中还有可能有如核辖射、废墟坍塌等危险情况,对人们生命造成重大威胁。而作为爬行机器人分支之一的仿尺蠖机器人,因为其出色的运动性能,能够在各种较为复杂的环境中运动,所以使用其深入这些环境中,来完成检测、搜索等工作,这能够有效的降低工作人员的危险,减轻人的劳动强度。故将仿尺蠖机器人应用于复杂环境下的作业,是当前机器人技术中非常具有前景和实用价值的一个领域。
1.2.国内外现状
仿生机器人是机器人发展的最高阶段,是仿生学的各种先进技术与机器人领域应用目的的最佳结合,是机器人发展的最终目的[1]。
2010 年由韩国西江大学的 bu hyun shin,young-bong bang 等人研制了一种使用分段螺线管的仿生制动器的微型尺蠖机器人[2]。电磁驱动微致动器是由4段螺线管和导轨组成。永久磁铁的两极是它的固有性质,是不可能改变的,磁极之间同极排斥,异极相吸。但电磁螺旋线圈可以通过改变其中流通的电流方向而改变它的电极方向,所以控制相邻螺旋线圈的电流流向就可以改变线圈之间的作用力,比如两极之间的引力或斥力。所以每段线圈就会受到3个作用力,引力、斥力、与导轨之间的摩擦力。改变每个螺旋线圈的电流大小和方向,控制作用在它们自身上的合力,就可以实现各个线圈的移动,也就是仿生尺蠖机器人整个身体部位的移动。如图 1.1 所示,机器人有四个步骤来完成一个运动周期。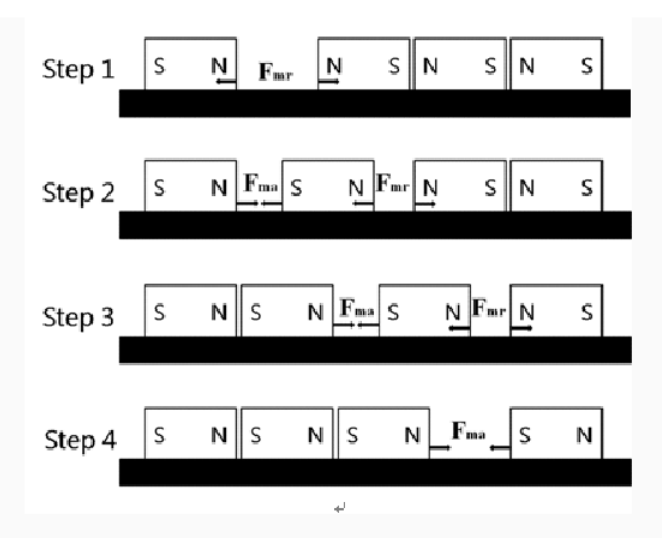
图1.1
2010 年北京交通大学的科学家们发明了一种蠕动式尺蠖机器人[3]。该机器人由很多节连接而成,每一节都固定有一个直流电机控制,可以在竖直平面内运动。直流电机改变相邻两个节之间的连接角度,并且有一个位置传感器用来反馈连接角度。机器人总共有八节,运动时有四节处于弯曲状态,另外四节则与地面保持接触。刚开始时,整个机器人的各节都处于水平静止状态,然后从后段开始,每节的直流电机按一定要求序列的完成指定旋转角度,直到机器人最前端。当一个周期序列完成时,机器人就整体向前移动了一步。具体移动步态如图 1.2 所示。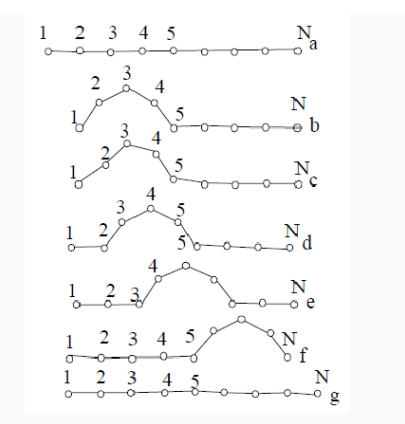
2. 研究的基本内容与方案
2.1.设计的目的由于爬行机器人在搜救,探测领域具有重大意义,本文拟设计一种模仿尺蠖的运动特性,用以蠕动来运动的爬行机器人,借以形状记忆合金弹簧驱动,减小机器人的体积,使其能够进入一些人类无法进入的环境,且能够在一定坡度上进行运动。
2.2.设计的基本内容
a.提出本文设计的仿生尺蠖机器人的总体方案,描述其机械结构。
b.对仿尺蠖机器人的sma弹簧进行静力学有限元分析,并对其运动的过程进行摩擦动力分析。
c.运用三维软件 solidworks建立仿尺蠖机器人的三维模型,对模型进行仿真实验,并分析所得结果。
d.绘制出仿尺蠖机器人的总装配图以及抓地部位和驱动部位的零件图。
2.3.仿尺蠖机器人抓地部位的技术方案
仿生尺蠖机器人的运动方式可大致描绘如下:机器人前端先抓地,后机器人整体长度进行缩收,随后机器人后端抓地,前端松开,机器人回复原长,以此完成一个运动周期,故如何精确控制机器人前后抓地的动作是一个难题。
a.利用机器人两着力点的摩擦系数不同来进行爬行
如图1.2,在机器人运动时为了增大四连杆机构落地部分与地面的摩擦力,可在其端部涂抹摩擦系数较大的橡胶。同时,为了减小刚性脚与地面滑动时的摩擦力,可在其端部涂抹摩擦系数很小的聚四氟乙烯,借由不同的摩擦力来进行爬行[5]。
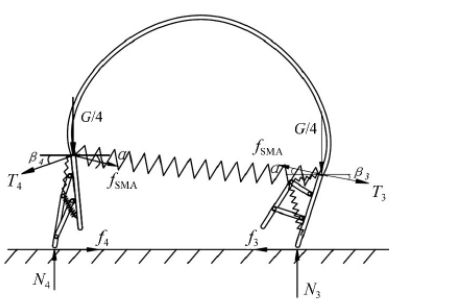
图2.1
3. 研究计划与安排
第1~4周:完成开题报告和英文翻译。
第5周:确定仿尺蠖机器人整体尺寸大小,并选取相关的国标零件及所需弹簧大小。
第6周:根据所尺寸大小对各种方案进行相关计算并确定最终的抓地方案.
4. 参考文献(12篇以上)
[1] 吴文鑫. 变摩擦系数环境下直线电机驱动的仿生尺蠖机器人[d].华中科技大学,2013.
[2] bu hyun shin, yong-bong bang, seung-wook choi. inchworm-like robot locomtion using segmented solenoids. ieee/asme international conference on advanced intelligent mechatronics. montreal, canada, 2010:367-372. han shukui, wang bin, du ren. design and motion of a redundant snake robot. international conference on measuring technology and mechatronics automation., 2010:962-965.
[3] dongwoo lee, sinbae kim, yong-lae park. design of centimeter-scale inchworm robots with bidirectional claws. ieee international conference on robotics and automation. shanghai,china,2011,5:3197-3204.



