仿生机器鱼的运动模拟和基于神经网络的偏航控制外文翻译资料
2022-10-31 14:31:30
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
仿生机器鱼的运动模拟和基于神经网络的偏航控制
周超, 侯增光, 曹志强, 王硕,谭敏
中国科学院自动化研究所复杂系统与智能科学实验室,北京100190
文章信息 摘要
文章历史:
2011年3月11日
本文着重于仿生机器鱼波动推进的建模和基于该模型的神经网络偏航控制器的仿真。
首先,由于第一链路在偏航控制中的振荡的引入,建立了基于拉格朗日自由游动的运动模型,并且在耦合动力学和运动学函数的基础上进行计算,得到了广义力和流体动力的关系.第二,通过从这个模型生成的数据来训练神经网络,以便获得可由每个链路的不同偏移来控制方向的偏航控制器。最后,对该模型进行仿真来演示与检验控制器的性能。
关键词:
仿生机器鱼
运动建模
偏航控制
简介
鱼具有游泳运动,尤其是在开放水域和具有限制性的栖息地中显示出极强的机动性。这种运动机制与典型的人造车辆形成鲜明对比,其优点已经吸引了许多研究者的注意,并且提出了各种理论来解释鱼的游泳运动的机制,进一步总结出了其运动的驱动模式[11,15-17,19]。仿生机器鱼的许多原型[1,5,8,9,12,20-22]是在模仿鱼类的游泳运动中完成与改进的。一般来说,仿生机器鱼被定义为基于鱼的游泳技能和解剖结构的鱼状水生运载体,包括其波状/浮游体运动、高度可控的翅片和大面积比的尾巴。在麻省理工学院开发了一种称为RoboTuna(该项目开始于1993。他们的目的是探讨构建机器人潜艇可以繁殖方式金枪鱼游泳和的可能性,看他们是否能找到一种优越的动力系统自主水下航行器(AUVs)。他们的实验是成功的因为他们发现他们的鱼是更具有可操作性和使用更少的能源比其他机器人潜艇。)的8连杆箔片振动机器人机构,这个机器人在一个主动控制的身体上测量力。 RoboTuna和随后的RoboPike [3]项目试图创造AUV(自主水下航行器),使其更加节能从而增加的任务持续时间。这些项目利用灵活的后身体和拍打箔(尾鳍),利用外部流体力产生推力。此外,加藤认为控制胸鳍状机械结构是用来推进的,从而研究出黑鲈鱼机器人原型[8]。
最近已经做了分析机器鱼的运动[4,13,14]和控制[10]的工作。 例如,Burdick的研究小组研究了鳟行式运动,包括复杂的控制策略和流体动力学分析[18]。麦基萨克和奥斯特洛夫斯基[4,13]已建立由李群对称性减少对称结构的机器鱼拉格朗日模型。 布瓦耶,珀赞德和卡里尔 [14]提出了一个连续的三维游泳鳗鱼样机器人的动态建模。 我们实验室的研究人员已经开发出了一系列的多连杆机器鱼的原型,他们已经在原型[21,22]的基础上进行了信息处理,合作和3D运动等工作。机器鱼是一种有吸引力的水下航行器,因为它存在高效,机动和无噪音的潜力。
然而,在开发机器鱼中基本的偏航控制方法仍然缺乏广泛的研究。 例如, 机器鱼的头部(第一链节)的波动在以前的工作中经常被忽略,因为它的振幅与推进相比很小[18]。运动模型可以大大简化,运动学和动力学可以分解,但是它们不能描述机器鱼的运动的所有细节,因为当头部振动时许多能量被浪费。这些模型也不适合于定向控制,其中,头部的运动太大而不能被接收,并且定向的变化难以与振荡区分开。为了解决这些问题,一个自由游泳的模型,没有非振荡器y头运动的假设是必要的。同时,可以通过改变对称的波动中心来控制机器鱼的推进方向,这意味着偏航控制需要在每个控制循环中计算每个链路的偏移。然而,由于力的复杂性,难以控制取向变化。因此,在此建议通过模型训练的神经网络预测控制器来计算每个链路的偏转以控制转动运动。
本文的其余部分安排如下。 第2节介绍了机器鱼的动力学和动力学模型和水动力模型的研究。 第3节介绍了神经网络预测控制的设计。 模拟在第4节做出,第5节结束本文。
机器鱼模型
在本节中,我们提出了一个简化的仿生机器鱼原型的序列结构及其推进运动机制。 机器鱼的运动基于拉格朗日函数和流体力建模。
鱼状运动
鱼有多种运动方式,可分为水平面运动和垂直面运动,前者包括匀速巡航前进或后退、C形转弯、S形转弯等;后者包括上浮下潜运动。可以在分析匀速巡航运动规律的基础上进行建模设计机器鱼,然后再研究此机器鱼的其他运动方式。鱼体的匀速摆动前进( 即巡航运动) 过程可以视 为一种从鱼头向鱼尾方向传播的行波,它的波幅逐渐增大,且其波幅包络呈二次曲线的特征,波形为正弦波,因此鱼体的前进波可以通过二次曲线与正弦曲线合成而来。实际上,鱼的运动并没有一个固定的规律,但可以近似地借用数学模型来描述,只要这个模 型的误差在可以接受的范围内即可。
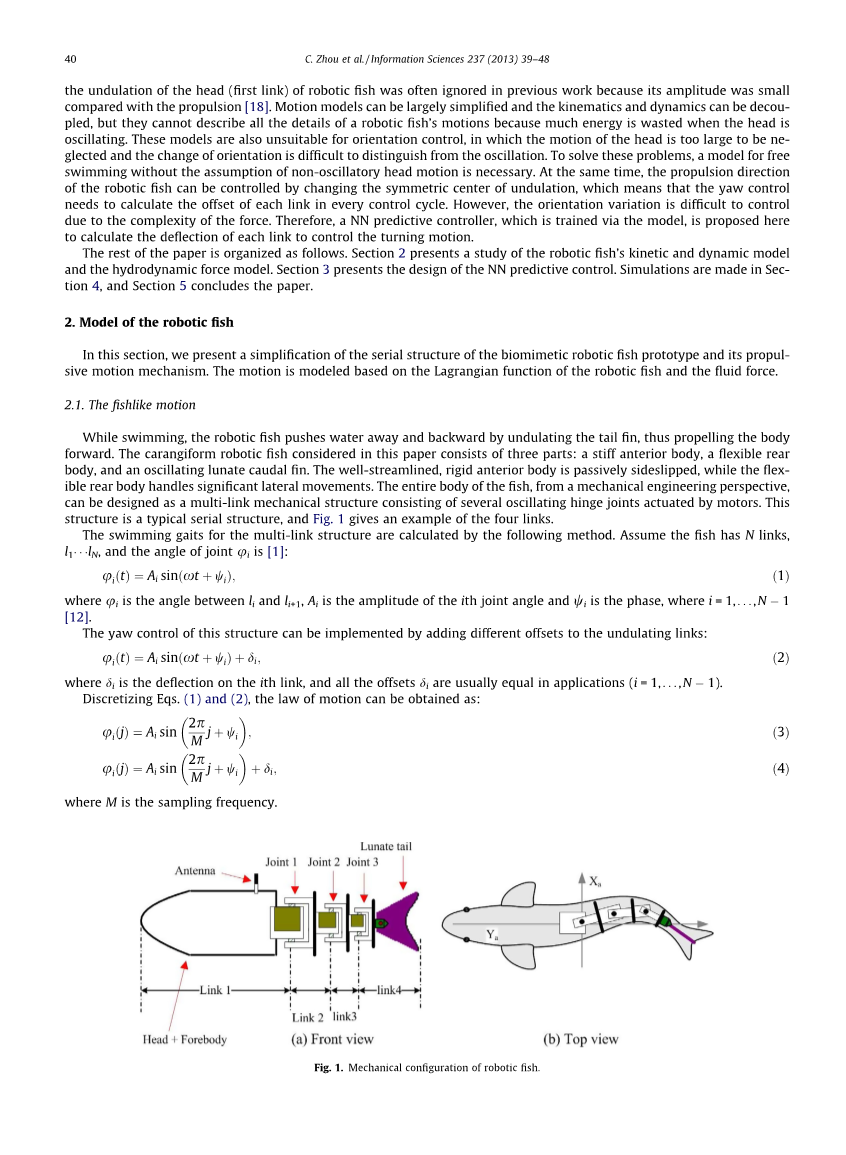
当游泳时,机器鱼通过使尾鳍的摆动而将水推开并向后推动,从而向前推动身体。 本文所考虑的条纹状机器鱼由三部分组成:一个僵硬的前体,一个柔性后体和一个摆动的月尾尾鳍。 机器鱼呈现出良好的流线型,刚性前体被动侧滑,而柔性后体处理显着的侧向运动。 从机械工程角度来看,鱼的整个身体可以被设计为由通过马达驱动的多个摆动铰链节头组成的多连杆机械结构。 这种结构是典型的串联结构, 图1给出了四个链路的示例。
通过以下方法计算多连杆结构的游泳步距。 假设鱼有N个链路,l1... l2,并且关节的角度为[1]:
(1)
其中i是li和li 1之间的角度,Ai是第i个关节角的振幅,是相位,其中i = 1,...,N-1 [12]。
该结构的偏航控制可以通过向波动链路添加不同的偏移来实现:
(2)
其中是第i个链路上的偏转,并且所有偏移i在应用(i = 1,...,N 1)中通常相等。
离散方程 (1)和(2),运动定律可以获得为:
(3)
(4)
其中M是采样频率。
图(1)机器鱼的机械配置。
简化系统
这种机器鱼是典型的串行机器人,其运动可以通过拉格朗日函数描述。然而,机器鱼和更熟悉的机器人之间的一个显着差异是机器鱼的运动没有固定点(例如,用于机械臂的基础框架)或固定参考系统(例如,对于移动机器人)。机器鱼自由地在水中游泳,并且其链节的运动与水相互作用,使得运动确定流体动力的大小和方向,其相反地确定鱼的运动。动态和动态问题因此耦合,因此它们不能单独计算。等式(1)和(2)仅给出链路的相对运动定律。
仿生机器鱼的基本概念是建立拉格朗日函数。从第二类拉格朗日方程获得的广义力等于流体力学计算的力。最后,可以建立偏微分方程组。给出了一些假设以简化建模:
- 机器鱼体可以认为是N连接板[1,19]。
- 机器鱼在静止的水中游泳,并且不受环境中的反射波的影响。
- 机器鱼的变形可以忽略,除了关节的运动。
- 运动仅在二维分析,这是最重要的推进情况。
简化多连杆结构的俯视图如图2所示,其中参数针对XOY(世界直角坐标系(WRCS))进行标记。
在图 2,li既是机器鱼的第i个链节,也是链节的长度。i是第i个链路和极轴r之间的角度。i是第i个链路与第(i-1)个链路的延长线之间的角度。 如果逆时针测量,参数i,i都是正角。 (xfi ;yfi ), (xgi ;yig ) 和(xi,yi) 分别是图的中心,重心的中心和第i个链节的结束点。 当机器鱼正在推进或转动时关节角度由方程(1)或(2)给出。
系统的拉格朗日函数 根据第2.2节中的第四个假设,势能是恒定的。 每个链节的动能包括相对于WRCS的平移部分和相对于质量中心系统的旋转部分。 因此,拉格朗日函数定义如下: 其中mi是第i个链节的质量,Ii是第i个链节相对于质心系统的惯性矩。然后,选择x1,y1,h1作为广义坐标,即,X = x1,Y = y1,H = h2。 现在,xi,yi,hi可以以下面的形式重写:
图( 2) 简化的机器鱼和参数的定义。
:
其中lgi 表示 (xi,yi) 和 (xgi ,ygi )之间的长度
我们重写拉格朗日函数L = L(X,Y,H)如下:
力和力矩模型
作用在机器鱼上的流体动力由瞬时运动确定。 在大雷诺数[1,14,20]的情况下已经广泛用于文献中的流体动力学阻力模型被用于分析垂直于游泳机器鱼的表面的力。 然后,流体力学表示如下:
其中=CS / 2是阻力系数。 ,C和S分别是水的密度,形状系数和有效面积。 Vperp;是沿着垂直于表面的方向的速度的投影。
作用在机器鱼上的力被分为三个部分:链节上的压力,接近的流压力和摩擦阻力。
- 链节上的压力表示当机器鱼的第i个链节摆动时的流体动力
其中F perp;i是第i个链节上的压力,v perp;i是第i个链节沿垂直方向的速度的投影, perp;是平板型的C的阻力系数。
lt;
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[141794],资料为PDF文档或Word文档,PDF文档可免费转换为Word



