采用波变量法的双边遥控挖掘机触觉设备的新颖设计外文翻译资料
2022-09-20 10:19:47
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
采用波变量法的双边遥控挖掘机触觉设备的新颖设计
Dongnam Kim 1 , Kyeong Won Oh 1 , Chang Seop Lee 1 , and Daehie Hong 2,#
1 Graduate School of Mechanical Engineering, Korea University, 5-1, Anam-dong, Sungbuk-gu, Seoul, South Korea, 136-713
2 School of Mechanical Engineering, Korea University, 5-1, Anam-dong, Sungbuk-gu, Seoul, South Korea, 136-713
# Corresponding Author / E-mail: dhhong@korea.ac.kr, TEL: 82-2-3290-3369, FAX: 82-2-3290-3864
摘要
在许多高层建筑已被拆除或拆毁的同时,研究人员已经开发出了许多新的拆解方法和设备。其中,挖掘机上配备的附件,如压碎机或破碎机已经被最广泛的应用到了许多需要拆除的废墟上。本文介绍了可以用于从远程站点控制挖掘机触觉设备的一种新颖的设计和控制算法。新设计的遥控装置与挖掘机运动学之间有良好的匹配,以便使挖掘机即使在新手操作下也能够得到直观的操控。该装置还可以通过挖掘机力反馈将触觉感官告知于操作员,这将给予操作员更好的远程操作挖掘机的感觉,并有助于避免危险情况的发生。为了开发远程操作的算法,本文分析了基于挖掘机运动学和动力学的力反馈机制,使用波变量法来实现双边遥控操作的控制。该触觉装置的可行性通过现场试验进行验证。
关键词:双边控制、拆除、挖掘机、触觉、波变量法
1 简介
建筑自动化对机器人技术来说具有极大的兴趣。由于近几年增加高层建筑的建设,拆除废墟也变得相当普遍。挖掘机通常是用在机械拆除的方法中。然而,拆解过程中是非常危险的,有时甚至会导致死亡事故。防止这种事故的一种方式是从远端安全位置操纵该挖掘机。这使得操作员能远离飞溅的破碎物,并能防止即使机器以任何方式损坏所对操作员造成的危害。
在大量机器人解决方案的论文中对有关于挖掘机的自动化和远程控制技术的研究相对较少。挖掘机远程控制所需的感测装置和运动控制算法成为一种可行的技术。正如DiMaio等人所说,虚拟挖掘机可被运用于控制真实挖掘机之前。从Frankel和Koivo等人的工作中可以看出,所涉及的运动学分析是用来开发合适的运动控制算法。然后,为了在触觉设备上应用力反馈机构,对挖斗前端的外力进行了动态分析估计。基于运动学和动力学同时分析的挖掘机运动控制算法已经被开发出来,这已成为一个智能挖掘机的基础。为了方便触觉设备的远程操作,力反馈算法需要通过结合一个双向通信系统进行调整。Hannaford研究的双端口网络与Lawrence开发的四通道体系结构,这两者都形成了双边远程操作机器人的基础。波变量法有时也被使用于远程操作系统的开发。进一步工作存在的焦点是关于阻抗控制施加到双向控制系统。机器人接触任务的性质也是远程操作控制领域的一个重要因素。最后,许多类型的操纵杆已经为了克服现有杆式操纵杆固有的弱点而进行了检查。
复杂液力模型如阀动力学被用于现有的液压控制算法来估算输出状态。调压阀有时被用于控制泵的压力,以满足更为稳定地操作控制,而伺服阀用于更准确的控制。然而,这些液压元件是昂贵的,并且由于其高度的非线性特性使得它们的动力学是非常复杂的。换句话说,它是很难预测给定输入信号的气缸力的。本文提出在每个气缸使用压力转换器,而不是使用复杂的阀动力学和昂贵的液压元件。在这种方式下,挖掘机可以通过估算的气缸力和链路参数进行更容易的控制。下一个装置要与现有杆式操纵杆一起完成,自从其运动映射与该挖掘机完全不同之时,这个装置就既不直观,也不再适合作为触觉装置。Kim等人提出使用配备有角度传感器的与挖掘机形状类似的人臂,但力反馈是不可能与此设备相似的。最近商业的触觉设备,例如幻影系列,已被运用于力反馈。然而,幻影设备的机械结构意味着它不适合于挖掘机的控制。操作者会被参与幻影设备的被动链接所疑惑,并且在长时间使用它之后会受到身体劳累之苦。为了解决这些问题,本文提出了专门针对挖掘机控制设计的新的触觉装置。此触觉装置是为了克服传统的操纵杆或幻影设备的缺点。因此,初学者可以使用该设备直观、舒适的控制挖掘机。使用波变量法的力反馈机制也适用于该触觉装置。最后,为了在拆除领域测试此远程操作挖掘机,挖掘机的履带也被控制。研究移动机器人的测距控制可适用于改善此基本活动的控制。
所涉及到的运动学和动力学在第2节进行了简要说明。基于动态模型的运动控制算法在第3节中提出。在接下来的第4节中对新的触觉装置连同其控制进行了介绍。随后对实验结果进行检查以验证所提出的触觉装置的可行性。
2 挖掘机运动学与动力学
2.1运动学
挖掘机有四个自由度的运动能力,也就是说,有四个旋转接头:悬臂、臂、铲斗和转动。悬臂、臂和铲斗的旋转发生在二维平面,转动轴线与固定的平台垂直,如图1和图2所示。因此,铲斗前端在平面的位置可从正向运动学独立摆动变量的三个主要链路的角度来计算。正向运动学给予了关节变量以产生铲斗的位置和方向。每个关节由液压缸驱动,所以可以在缸筒长度已知的情况下来计算关节角度。该计算变换气缸空间到关节间隙。用于挖掘机正向和反向运动学的详细推到可以在现有的研究中找到,因此本文就省略了。
图1 用于远程操作的小型挖掘机(铲斗容量为)
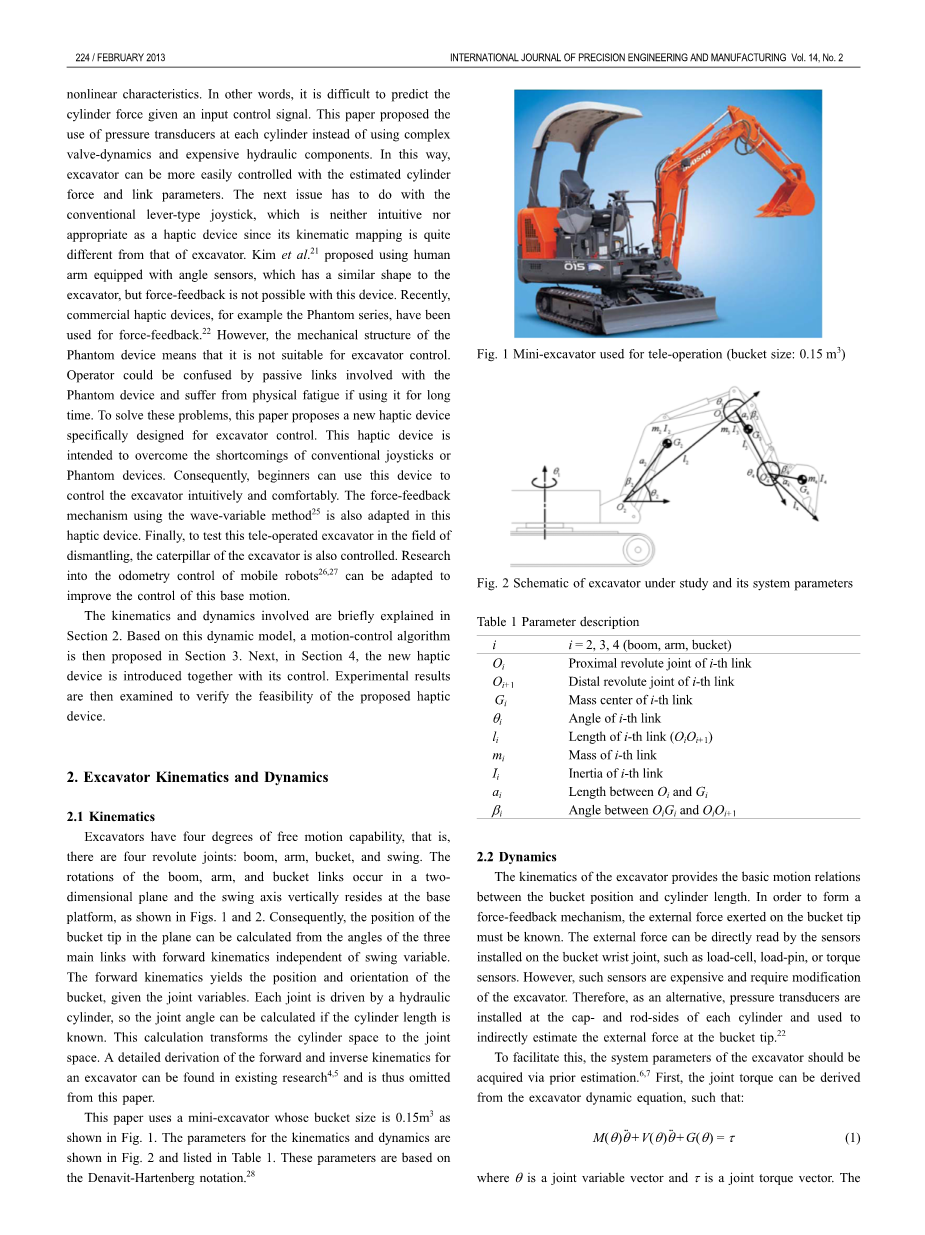
图2 挖掘机原理及系统参数
本文采用一个铲斗容量为0.15m3的小型挖掘机为例,如图1所示。运动学和动力学参数如图2所示,并列于表1当中,这些参数是基于D-H矩阵符号的。
表1 参数说明
|
i |
i=2,3,4(悬臂、臂、铲斗) |
|
相邻连杆近端旋转关节 |
|
|
相邻连杆远端旋转关节 |
|
|
连杆质心 |
|
|
连杆角度 |
|
|
连杆长度() |
|
|
连杆质量 |
|
|
连杆转动惯量 |
|
|
到的长度 |
|
|
之间的角度 |
2.2动力
挖掘机的运动学提供了铲斗位置和气缸长度之间的基本动作的关系。为了形成一个力反馈机构,所施加在铲斗前端的外力必须已知。该外力可以通过安装在铲斗腕关节的传感器,如负载传感器、应力销,或者扭矩传感器被直接读出。然而,这种传感器是昂贵的,并且需要在挖掘机上进行安装。因此,作为替代,压力传感器安装在每个气缸的顶部和杆侧,并用来间接估算在铲斗前端的外力。
为了推动这项工作,应通过事先估计而确定挖掘机的系统参数。首先,关节扭矩可以从挖掘机动态方程导出,即:
(1)
其中?是一个关节变量矢量,?为关节扭矩向量。然后将动力学方程分解为一个系统参数向量和一个回归矩阵?,重新将动力学方程写为(参见详细推导):
(2)
参数向量包括动态和静态部分,为:
(3)
当挖掘机连杆臂移动时,动态参数是有效的,并与线性程度和角动量有关,而静态参数则与重量有关。下面进行了实验来估计动态参数。在45秒钟使挖掘机三个连杆臂任意移动,然后对气缸长度以16毫秒为采样周期进行采样。采样总数约为2800次。气缸长度由安装在气缸的线性编码器测得,并通过适当的运动学关系转换成连杆角度。然后,用角速度和加速度来计算回归矩阵。在计算来自角位置在矩阵上的加速度时使用了由Tafazoli提出的低通滤波技术,以便于降低噪声放大的量。接着,关节扭矩向量是直接由气缸入口与出口的气压,以及缸筒的大小来计算得出的,现以缸筒内径为5.5cm、推杆直径为3cm来计算。其结果可获得该回归矩阵和转矩矢量。最后,通过最小二乘法估计的静态和动态参数。其结果为,。在第一个实验中还估算了关节的摩擦系数,但被认为是最小的,因此随后被忽略。
估算的参数与另一组时间设定为20秒的实验数据进行了验证,如图3所示。实线是从气缸压力数据直接转换得出所述的关节力矩,而虚线表示使用估计的参数通过公式(3)所得出的计算扭矩,它们显示良好的一致性。
2.3外力
有趣的是,要注意到公式(3)产生的是一个无负载情况下所估计的关节扭矩,即只是由于纯动态惯性和连杆的重量。当一个外部作用力作用在铲斗时,在关节气缸处便会产生附加压力。表示为:
(4)
其中是对于外力的关节扭矩向量。外力矢量可以通过雅可比矩阵来获得,以使得:
(5)
图3 悬臂、臂和铲斗估算和测量的扭矩之间的比较
3 挖掘机运动控制
3.1硬件系统
使用一个铲斗容量为的微型挖掘机,配备有比例控制阀和放大器。为了获取链接角度,在三个气缸上各安装了一个线编码器,从而可测量气缸杆的长度。最后,在每个气缸的顶部及杆侧安装了六个压力换能器,以便能根据输入控制信号测得气缸力。控制程序使用Visual C 编码。在一个工业PC上安装一个型号为6024E的DAQ板(国家仪器公司)和一个PCI8136板(凌华公司),以便能使用模拟I/O并接受线编码器的信号。
3.2位置控制
触觉控制在位置控制上的实现是最为经常的。然而,挖掘机的位置控制设计的液压部件,例如伺服阀、气缸和泵,其通常显示高度非线性行为。已经有大量的研究去模拟这些液压元件及其应用。然而,在这种方式下开发的模型太复杂以至于无法用于控制目的。从商业化生产的挖掘机上获得这类车型的所有液压元件的动态参数也是相当困难的。此外,昂贵的伺服阀将需要用于改进控制。
在挖掘机控制方面,比例阀的不工作区,悬臂、臂和铲斗连杆的惯性是最关键的非线性器件。即连杆在直到输入电压被偏置到一定量,以克服不工作区和惯性的情况下才会移动。在本文中使用的控制策略是,将偏压加到被用于补偿剩余非线性动力学和干扰的控制输入端和PD(比例和微分)控制。这个最小输入偏置是对启动连杆运动的预先测量前反馈。
最小输入根据挖掘机的配置而变化,具体指的是在连杆惯性上的变化。例如,向外延伸了的臂在向内折叠一次时对悬臂油缸增加了更多的重量。即最小输入是关节角度的函数。然而,在相对于气缸力的测量时,由于气缸力已经包括连杆惯性,从而使其变为独立的惯性变化(即独立的关节角度)。为了实现这个实验对输入偏置信号的自动测量,从而开发了一个适用的程序。在连杆开始移动超过0.05°后,输入电压在每个0.5s的持续周期内都会增加0.01V。图4(a)表示铲斗连杆的测量数据。图中x轴代表铲斗旋转运动动态参数在390-260°范围内的估计气缸力。y轴表示出了铲斗在该位置时开始旋转运动所需的最小输出电压。输入电压的范围是0-5V。中性点电压为2.5V,超过2.5V铲斗发生转动,低于2.5V铲斗保持原有状态不动。在图4(a)中,铲斗从完全转储位置(390°)移动至转动位置(260°)。首先,气缸拉铲斗连杆使其保持位置,这拉力约为1000N(拉力由约束确定为正向)。在铲斗通过垂直位置之后拉力减小并逐渐变为负(推)力。输入电压约为恒定的2.74V()。-900N之后,由于重力作用输入电压必须增加。换句话说,输入电压的增加是用来抵抗重力效应的。图中的细线表示由自动测量程序所测得的数据。细线用一个二次多项式来表示如下:
(6)
同样,对于铲斗连杆的倾倒运动的曲线图如图4(b)所示。对于悬臂和臂的最小输入电压可以通过相同的方法而获得。这些关系作为前馈表现被用于位置控制。位置控制的实验结果如图5所示。悬臂、臂和铲斗的任意位置命令都由主触觉装置并提供给位置控制器进行执行。控制反映(细线)追踪稍微延迟一点的命令。
图4 铲斗开始运动的最小输入电压与气缸力的关系
图5 位置控制的实验结果
4 遥控操作
4.1触觉装置
基于上一节中所描述的运动控制算法,本节开发了一个主触觉臂的远程运行系统。将传统的杠杆型操纵杆用于挖掘机遥控,此操纵杆基本上与安装在挖掘机工作舱的相同。然而,使用传统的操纵杆对于新手操作员来说过于复杂。这不仅要使操作员具有相应的头脑使操纵杆移动到相应的位置以完成挖掘机的运动,同时因为他们不能感知环境条件,对于初学者来说也很难控制远程站点的设备。
在本文中设计了一个适用于实际挖掘机的直观的触觉装置。我们想出了几种不同类型的触觉设备的想法。如图6所示的触觉设备是最终的设计,是新手和有经验的挖掘机操作人员认真评估的选择。该装置模拟了挖掘机的动作联系,悬臂、臂和铲斗的动作被分别映射到肘、腕和食指,如图6所示。与需要两只手的常规操纵杆相比,触觉装置除了摆动主连杆之外其余都可用一只手来操作。其结果
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148370],资料为PDF文档或Word文档,PDF文档可免费转换为Word



