环形混合哈尔巴赫磁轴承飞轮电池系统的设计与控制研究外文翻译资料
2022-09-06 11:39:00
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
环形混合哈尔巴赫磁轴承飞轮电池系统的设计与控制研究
Chow Shing Toh, Student Member, IEEE, Shyh Leh Chen, Member, IEEE
摘要:本研究中,飞轮电池系统由5自由度磁轴承和一个内装式电动机/发电机组成。磁轴承的类型为混合式磁力轴承,轴向采用被动磁力轴承(PMB),径向采用主动磁力轴承(AMB)。PMB采用一对环形永磁体以哈尔巴赫阵列垂直排列,支撑转子和飞轮的重量。AMB采用一组环形哈尔巴赫阵列放置在转子端,将对应于定子端的一组线圈。AMB在径向方向既能产生吸引力也能产生排斥力,这主要取决于线圈电流的方向。此外,将讨论环形永磁体的制造,它主要由粘合剂粘结弧形永久磁铁组成,因此它可能导致偏心距的存在。在另一方面,当分析磁力时,一个带有矩形永磁体的多边形结构被认为是相当于一个环形永磁体。当被一个主动反馈控制系统连同一个位置传感器驱动时,驱动器能产生适当的磁力平衡由PMB产生的径向磁力,实现稳定悬浮。AMB应用的线圈为差动式,这会导致一个线性趋势的力的关系。为了达到更高的可靠性,转速的变化将会被考虑到动力学系统中,这主要是因为它与共振和固有频率密切相关。最后,设计的控制器采用积分滑模控制(ISMC),能够克服不确定性的影响并实现良好的稳态精度。此外,数值仿真结果验证了控制器的有效性。
关键词:哈尔巴赫阵列,磁轴承,飞轮电池,非线性控制
- 绪论:
在二十世纪七十年代,提出了将飞轮储能系统主要应用于电动汽车和固定电源备份。当时制造了纤维复合材料转子,并且在二十世纪八十年代磁轴承开始出现。因此使用飞轮作为电能存储可能实现,并且人们开始建立了广泛的研究。
第一代飞轮主要是由钢铁这种材料制成,但只有低能量存储密度。第二代飞轮采用复合材料制成,有更高的能量存储密度,但由于结构和稳定性的限制只有有限的质量[1,2]。第三代飞轮被称为“力量光环”,使用径向磁轴承悬浮薄壁复合铁环,以高速旋转储存动能,相比化学电池有更高的功率密度[3]。
对应用程序需要脉冲电源而言,飞轮系统快速充放电的能力是一个关键技术。因此,在高速应用中的设计,首选替代传统机械轴承的是磁轴承。
解耦控制方法已经被应用于一个由两个径向磁轴承支持的五自由度磁悬浮转子非线性系统[4]。基于动态反馈线性化的非线性控制器的设计意味着,在归一化线性子系统中强耦合转子运动减少到5个解耦运动,包括四个转子的位移和速度,介绍了PID控制器[5]和滑模控制法[6]。八极点径向轴承的优点是每两对极点可以被分配给通常用于力学的笛卡尔坐标x和y [7]。
被动磁力轴承有几个优点,比如他们不需要输入能量并且不需要能量来冷却系统。对于被动磁力轴承,最简单的类型是由两个单片永磁环进行轴向磁化或径向磁化,提出了一种特殊的被动磁力轴承的设计,用来克服在径向和轴向两个方向上的负荷[8]。这种磁悬浮装置横向剪切力不稳定,必须被由主动磁力轴承提供的吸引力和排斥力稳定[9] 。
- 系统模型:
2.1.飞轮系统的描述
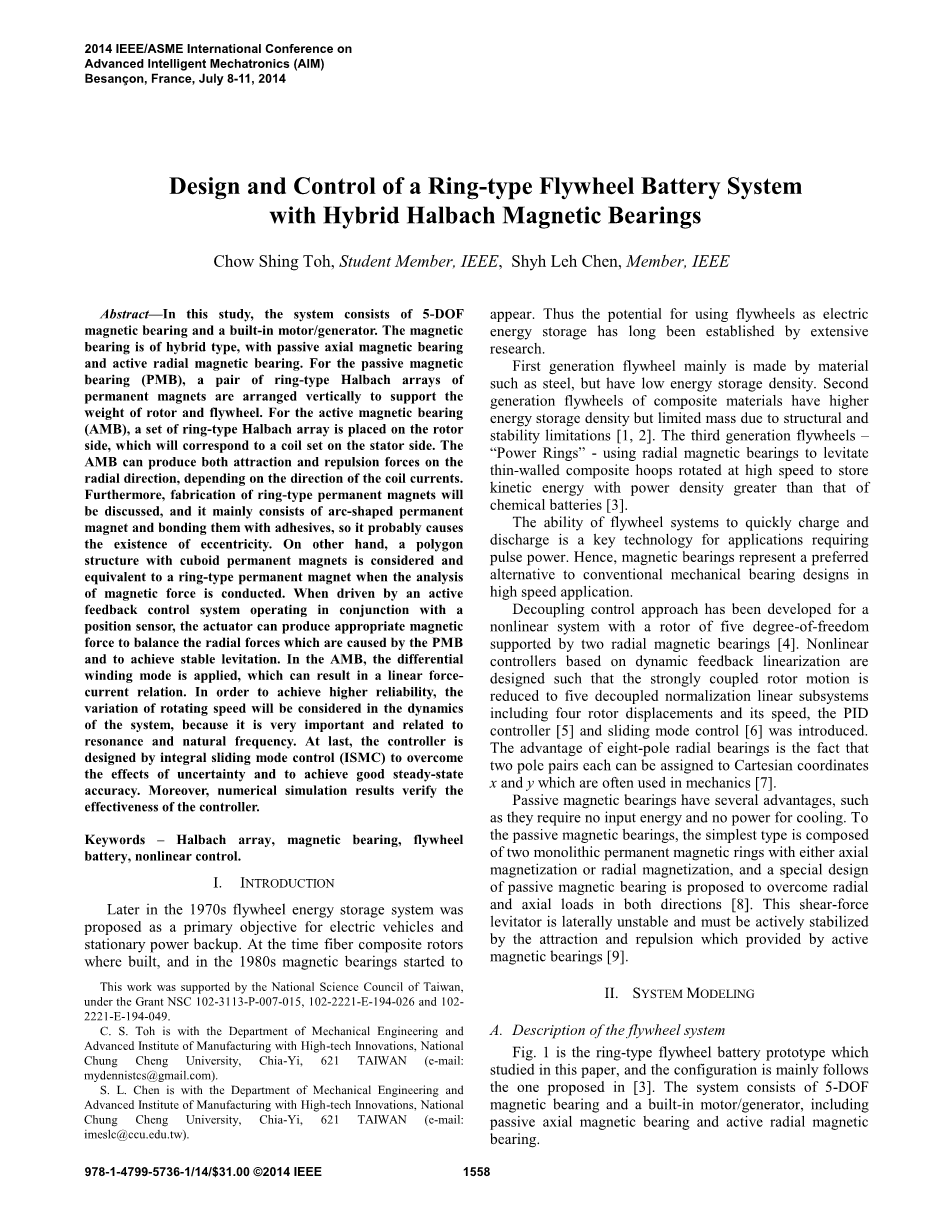
图1是本论文研究的环形飞轮电池原型,并且这个主要采用了[3]中提出的结构。系统由5自由度磁轴承和一个内装式电动机/发电机组成, 轴向采用被动磁力轴承,径向采用主动磁力轴承。
被动磁力轴承
电动机/发电机
主动磁力轴承
图1. 提出的飞轮电池系统模型
这个电动机/发电机安装在飞轮电池系统的中心。当它作为电动机时,电能提供给定子绕组,使转子旋转,并且获得转动能量。在发电机模式中,转动能量存储在转子中,可以通过电力电子电路提取,并且转换为电能输出。
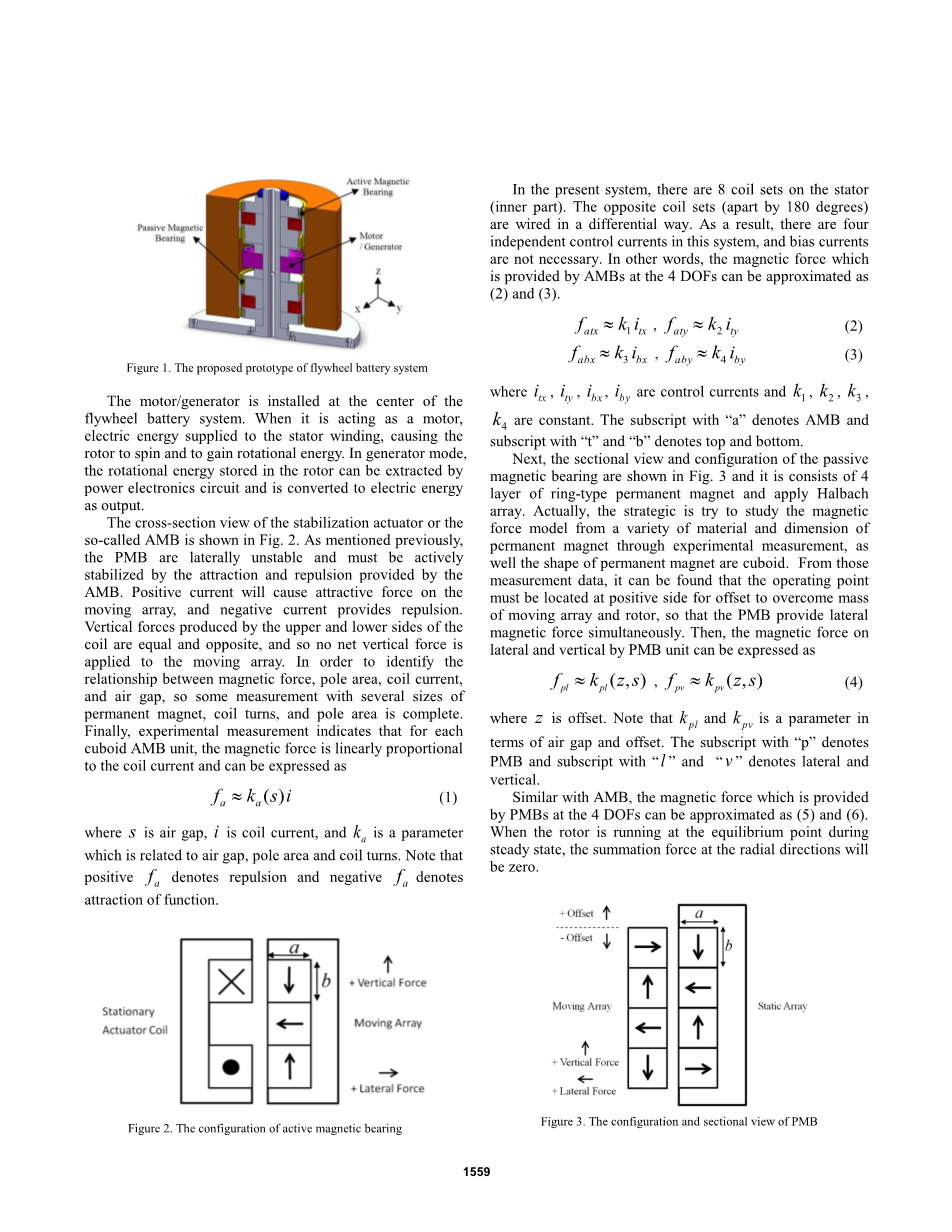
AMB稳定驱动器的横截面视图如图2所示。如前所述,PMB横向不稳定,必须被由AMB提供的吸引力和排斥力稳定。正电流在移动阵列产生吸引力,负电流则提供排斥力。由上下两侧线圈产生的垂直方向上的力大小相等,方向相反,所以没有剩余的垂直方向上的力应用于移动阵列。为了确定磁力,极区,线圈电流和气隙之间的关系,完成了几个不同尺寸的永久磁铁、线圈,和极区的测量。最终,实验测量结果表明,对于每一个长方体AMB装置,该磁力与线圈电流成线性正比,可以表示为:
fa asymp; ka(s)i (1)
公式中s是气隙,i是线圈电流,ka是一个与气隙,极区和线圈有关的参数。注意当fa为正数时表示排斥力,当fa为负数时表示吸引力。
稳定的驱动器线圈
移动阵列
横向力
垂直力
图2. 主动磁轴承结构
在目前的系统中,有8个线圈安装在定子上(内部)。相反的线圈(相隔180度)以差动的方式连接。结果,在此系统中有四个独立控制电流,偏置电流并不是必要的。换言之,AMBs提供磁力在4自由度上可以近似为(2)和(3)。
fatx asymp; k1itx , faty asymp; k2ity (2)
fabx asymp; k3ibx , faby asymp; k4iby (3)
公式中, itx,ity,ibx,iby是控制电流,k1,k2,k3,k4是常数。下标为“a”表示AMB,
下标“t”和“b”表示顶部和底部。
接下来,被动磁轴承的截面图和配置图如图3所示,它是由4层环形永磁体组成并应用哈尔巴赫阵列。实际上,策略是试图通过实验测量不同的材料和尺寸的永久磁铁研究磁力模型,采用永磁体的形状是长方体。从这些测量数据,可以发现,操作点必须位于正面,偏移以抵消移动阵列和转子的质量,因此同时PMB提供横向磁力。那么,由PMB单元提供的横向和纵向的力可以表示为:
fpl asymp; kpl (z,s) , fpv asymp; kpv (z,s) (4)
公式中z是偏移量。注意, kpl和kpv是一个与气隙和偏移量相关的参数。下标“p”表示PMB,下标“l”和“v”表示横向和纵向。
类似于AMB,由PMB提供的磁力的4自由度可以近似为(5)和(6),当转子在平衡点处于稳定运行状态期间,求和力在径向方向将是零。
fptxasymp;k5xt k6xb , fptyasymp;k7yt k8yb (5)
fpbxasymp;k9xt k10xb , fpbyasymp;k11yt k12yb (6)
公式中,xt,xb,yt,yb 是位于磁轴承的转子的位移,k6,k7, k8, k9, k10, k11, k12是常数。
横向力
垂直力
移动阵列
-偏移量
------------------------
偏移量
静态阵列
图3.被动磁轴承结构
2.2.控制方程
为了获得这飞轮电池模型的运动方程,在这里应用能量法。它假定旋转速度随时间变化(ne;0),转子z方向上的位移很小。那么,就可以得到运动方程,并且可以表示为:
sum; Fx= m(ltb lbt)/(lt lb) (7)
sum; Fx= m(ltb lbt)/(lt lb) (8)
sum; Mx= I(b-t)/(lb lt) Iz(t-b)/(lb lt) Iz(xt-xb)/(lb lt) (9)
sum; My= I(t-b)/(lb lt)-Iz(b-t)/(lb lt) (10)
在公式中有:
sum;Fx= k1itx k3ibx k13xt k14xb (11)
sum;Fy= k2ity k4iby k15yt k16yb (12)
sum;Mx= k4ibylb-k2itylt k17yt k18yb (13)
sum;My= k1itxlt-k3ibxlb k19xt k20xb
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146886],资料为PDF文档或Word文档,PDF文档可免费转换为Word



