对水下航行器推进对转双转子永磁电机的研究外文翻译资料
2021-12-27 22:24:43
英语原文共 10 页
翻译1:对水下航行器推进对转双转子永磁电机的研究
摘要:这篇文章提出了一种用对转双转子永磁同步电机驱动水下圆柱形航行器的一对反转螺旋桨。使用这种电机可以避免水下航行器的偏航和旋转,同时保持完美的电磁性能。因为安排了直接驱动,所以电机驱动系统的效率提高了,体积容量和成本也增加了。更重要的是,得益于电刷和滑环的移除,该电机比传统的水下直流驱动系统更加可靠。在电磁设计中,对磁极数 、永磁体大小、定子绕组的设计和无磁材料都进行了分析和优化。最后,设计出了一款额定功率为10.8KW、额定转速为1000r/min的反转双转子盘式永磁电机。分析了电机的主要性能参数,比如电动势、转矩还有机械应力,这些分析都证实了该电机设计的有效性和在水下航行器的应用。
关键词:对转、双转子、电机设计、永磁电机、水下航行器的推进
I.介绍
近几年来,因为可用于勘探深海资源和军事目的,水下航行器技术发展迅速。推进系统是水下推进器最重要的组成部分之一。目前,有两种常用的推进系统。一个是热力推进系统,还有一个是电机推进系统。
拿鱼雷作为例子,就效率和控制性能来说,电力驱动系统比热力推进系统更有优势。然而,如果只用一个电机驱动,航行器的摇摆和旋转会给航行造成一定的问题。如果使用两个转向相反的电机,这个问题就可以解决了。这种拓扑结构可以在双转子直流电机中实现, 在这种情况下, 两个转子向相反的方向旋转, 以驱动两个反旋转的螺旋桨。尽管如此, 由于这是一个直流电机, 需要两套换向器 (刷子和滑环), 这反过来又会引起维护和可靠性问题。或者, 径向双转子永磁电机 (RDPMS) 可以提供类似的性能, 无需任何机械换向器。设计者希望径向双转子永磁电机产生相同的扭矩,所以外部气隙磁通密度比传统电机小。因此,外部电机的利用率不足,所以整个系统的输出相对较低。此外,径向磁场电机的核心利用率仅为75%,而轴通盘式等效电机可以达到超过90%的核心利用率
近十年来,一些研究员对双转子电机进行了研究,如内外双转子永磁电机和内外双转子异步电机,【10】和【11】对于双转子、径向通量、转矩绕组、永磁电机的设计和优化方法以及齿槽转矩降低技术进行了深入的讨论。然而,这些机械安排两个转子在一个连接轴上,这个接头只有一个机械端口。【12】中提到了一种双机械端口电机,它利用两个分离的机械轴作为扭矩的输出。【13】中提出了一种用于水下航行器具有反向旋转转子的轴向永磁同步电机。这些研究都已经证明了双转子盘式永磁电机优于双转子直流电机和径向双转子直流电机。但是,由于双转子盘式电机特殊的结构,目前没有可参考的设计方法,因此这篇文章是为了研究它的电磁设计方法,然后分析设计方案的性能。
II.原理和特点
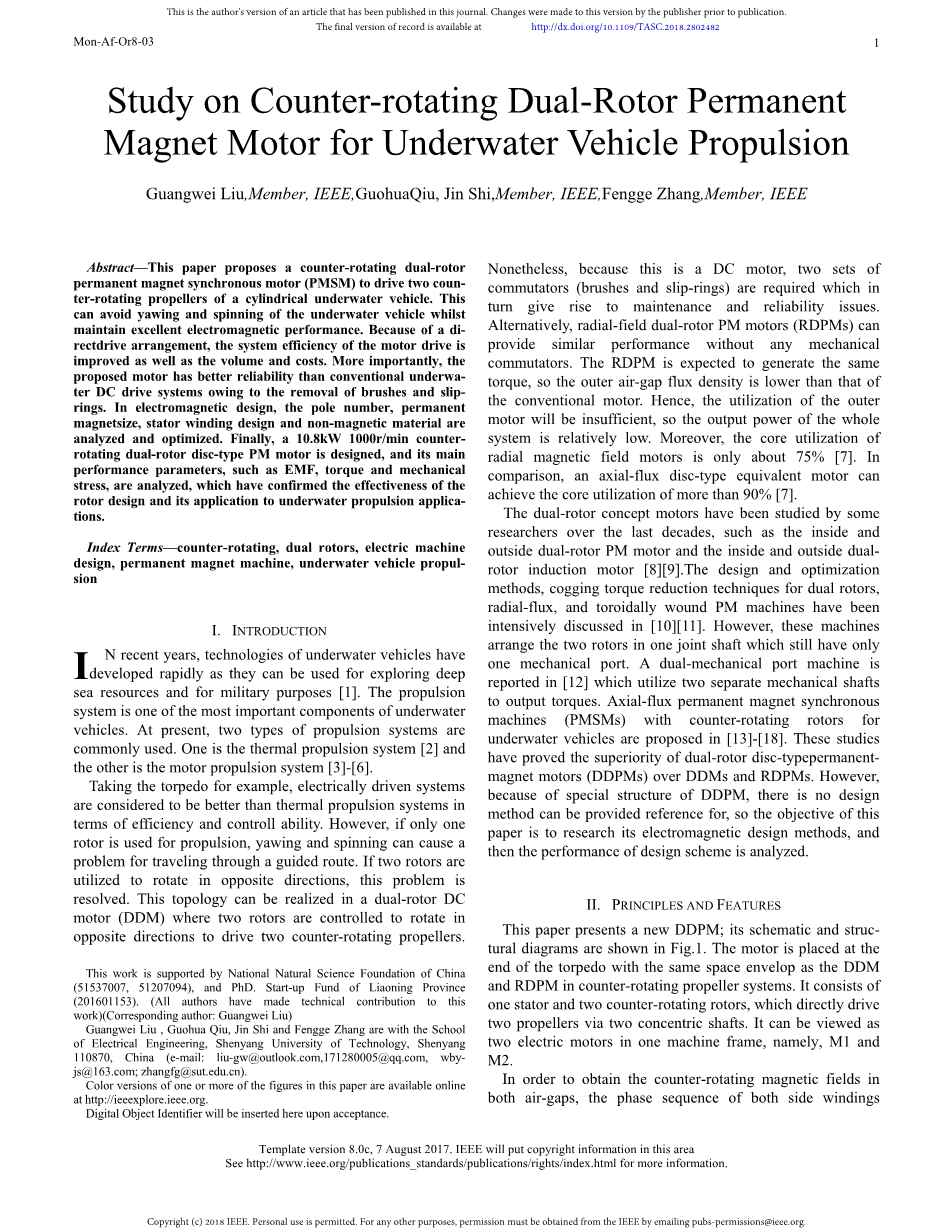
这篇文章提出了一种新型双转子盘式永磁电机,其原理图和结构图如图1所示。在反旋转螺旋桨系统中,电机被放在鱼雷的末端,其包络空间和双转子直流电机、径向双转子直流电机一样。它由一个定子和两个对转的转子组成,通过两个同心轴直接驱动两个螺旋桨。可以将他们看作是在一个机械框架下的两个电机,命名为M1和M2.。为了获得两个气隙中的反旋转磁场,两个侧绕组的相序应通过改变定子芯两侧两个相(b相和c相)的绕组来实现反相,如图2所示。当定子绕组通以三相对称电流时,定子两侧就会产生反旋转磁场。因此,产生反向电磁扭矩。这相当于传统永磁同步电机以相同速度驱动两个转子。
在这种拓扑结构中,两个磁路在两个转子周期改变的过程中产生周期的变化,从而导致气隙磁通的周期性变化。为了避免耦合效应,用绝缘材料将电机的定子分开。
III.设计方面的考虑
对转双转子盘式永磁电机的电磁设计过程要比传统的永磁电机复杂,因为它有两个转子、两个气隙、两个定子绕组以及两个磁通共用相同的定子轭。
A.磁极数的选择
研制新型的双转子盘式电机是为了取代现有的双转子直流电机和径向双转子电机,因此设计规范是相同的,以进行公平的比较。表I列出了这些信息。
首先,在电机设计中要考虑磁极数,磁极数对电机和齿槽的性能有很大影响。为了在定子轭中达到相同的磁通密度,有三种不同磁极数方案并且使用3D有限元的分析方法对其进行分析。因为盘式电机在轴向和径向都有磁通,3D模型能够考虑到两个方向的磁场和边缘效应。结果如图3所示。
4极电机的额定功率比6极电机低,同时因为很长的尾端绕线方式,4极电机的铜损更高。当插槽区域相同时,4极电机的定子轭相对较薄,造成4极电机的定子轭磁通密度高于6极电机,导致4极电机的额定功率较低。如果4极电机的插槽区域更小,那么它的定子轭厚度增加,将定子轭磁通密度提高到6极电机的水平,但由于插槽面积的减小,导致额定功率下降。
对于8极电机,随着磁极数的增加,每极磁通降低,所以定子、转子轭厚度也减小,插槽变得更深,从而可以安装更多的绕组,提高额定功率。但是,当定子轭太薄时, 机械应力不能满足要求,所以不采用这种设计。如果为8极和6极电机选择相同的插槽尺寸, 定子轭将是安全的, 额定功率彼此相似,但是8极电机的核心损耗会更高, 因为在相同速度下它的频率高于6极电机的频率。
图4比较了不同电磁设计方案的额定功率和损耗。结果显示,8极薄定子轭电机具有最高额定功率, 但转子强度低, 不能满足此类电机的要求。8极厚定子轭电机比6极电机损耗高。尽管4极电机损耗小,但是额定功率低。所以很明显,6极电机是最好的选择。
B 永磁体的设计
永磁电机的极弧系数和永磁体厚度的分析结果。极弧系数设定范围0.55到0.85,永磁电机厚度设置为0.3到0.5之间。当永磁体厚度为0.3mm,6极电机的气隙磁通量相对较低。当厚度增加到4mm,电机的几何视图(轮廓视图)和电机气隙磁密如图5所示。(R:径向方向。距离:沿圆周方向。B(z):磁感应沿z轴)。气隙磁密的RMS值为0.75T.如果永磁体厚度为5mm,则转子和定子芯饱和。
当永磁体的厚度和间隙分别为4mm和1mm时,对不同极弧系数的电机的电动势波形进行了比较,如图6所示。当极弧系数为0.75时,电动势波形的正弦值好于其他情况。当极弧系数为0.85时,电动势波形振幅小于其他情况。所以,将电机极弧系数设置为0.75,线路电压振幅为530V。
C 绕组的设计
当绕组并联时,电机相对于两个电机分开工作。并联绕组电机的绕组端相对较长,如图7a所示。图7b显示的绕组端较短的串联绕组。
电机质量也很重要,根据计算与仿真的结果,当绕组为并联时,铜的用量将增加16%。所以,当绕组为串联时,电机成本减少,铜损降低。
D 绝缘材料的影响
两个转子上的永磁体造成了定子的轴向力,轴向力对于反旋转双转子电机是独特的,但是,当定子中间使用非磁绝缘材料时,两个转子的磁通可以解耦,减少轴向力的波动,提高电机的稳定性。同时电动势的波形得到改善。
E 齿槽扭矩分析
对于6极电机,设计了一款额定功率为10.8KW的双转子盘式电机,分析了该电机的齿槽扭矩。对于开槽永磁电机,将产生齿槽永磁扭矩,影响转矩脉动并引起振动和噪音,说明齿槽转矩不能忽略【20】.当极弧系数是0.75,电机不加负载时,每个转子最大的齿槽扭矩为3.5Nbull;m. 如果永磁体倾斜一个定子齿的宽度,每个电机的齿槽扭矩最大值为0.8N.m.当电机负载时,每个电机的电磁转矩为49.8N.m.
IV.有限元分析
基于第三节中的设计考虑,设计了一款额定功率为10.8KW的电机。在本节中运用有限元的方法计算并分析该电机的磁场、电动势、转矩和机械应力。
- 磁场的计算
为了简化电机的模型,可以用2D模型取代电机的3D仿真模型,盘式电机可以等效为直线电机并且盘式电机的圆周可以展开为一个平面。最好在内径和外径的中点展开3D模型,因为在这个位置便于进行计算【21】。
2D、3D模型的电动势仿真对比结果如图8所示。图中显示,两者的波形和振幅相差不多,错误率低于5%。直线电机的额定力为520N,展开位置的半径为0.124m,因此,单电机的等效转矩为64.5N.m。由于2D模型没有边缘效应和弯曲效应,转矩的计算值大于3D模型的转矩值。所以有必要在等效模型中使用29%的安全系数。
对于盘式电机,有必要分析转子与定子之间的轴向吸引力。2D模型中的垂直应力可以等效为盘式电机中的轴向吸引力。图9显示了吸引力,有效值差不多为9.7KN. 当在定子中间使用3mm厚的绝缘材料,吸引力的波动会变小,在一定程度上降低了电机的噪音和轴承的磨损。
- 转矩角的计算
同步电机的一个重要特征是功率角特性。对于水下航行器的反向旋转螺旋桨推进系统,内部和外部的感应电动势应相等,所以电弧反应电抗可以相等或者近似相等。转矩角曲线如图10所示。可以看到,盘式电机的转矩角相同。
- 应力与变形
根据上述计算的应力,可以模拟出盘式电机的轴向应力模型。永磁电机的轴向应力如图11所示。从图中可以看出,最大的应力是4.32MPa,远小于转子的应力额定值。最大的变形量0.02mm,仅占气隙长度的2%。以上所有结果满足电机的设计要求。
V 结论
提出一款反旋转双转子盘式电机是为了提高水下航行器推进系统的性能。从这篇文章中,可以得到一下结论。
1)4极电机的总损耗和额定功率低于6极电机和8极电机。8极电机的额定功率高于6极电机, 但转子强度较低。所以6极电机是最好的选择。
2)当极弧系数为0.75,永磁体厚度为4mm时,电动势的波形最好。
3)对于给定的输出功率,绕组串联时的铜损可以节约16%
4)两组定子之间使用非磁材料可以最大限度降低交叉耦合效应,改善反电动势和转矩脉动的波形。
5)永磁转子和定子之间的吸引力造成的最大应力和形变非常小,不会改变机械结构的设计。
6)在水下航行器驱动中,本文提出的对转永磁同步电机可以有效的代替传统电机。这项技术也可以运用到其他的推进系统。
翻译2:对于水下推进反旋转永磁同步电机矢量控制的研究
摘要——在这篇文章中,设计出了一款反旋转永磁同步电机。反旋转永磁同步电机和传统的同步电机主要的区别在于转子和电弧都向相反的方向旋转。这种电机效率高并且适用于水下航行器。基于矢量控制理论的速度控制调节器被应用于反旋转永磁同步电机。根据普通永磁同步电机及其工作原理,建立了永磁同步电机的数学模型。为了研究, 用 MATLAB和SIMULINK 模拟了包括永磁同步电机模型、空间矢量脉宽调制 (CR-PMSM) 和矢量控制在内的整个系统驱动。之后,在TMS320F2812控制平台上执行控制系统,并应用于构建的反旋转永磁同步电机上。仿真和实验结果表明,矢量控制方法在反旋转永磁同步电机速度跟踪中具有突出的特点。
关键词-反旋转永磁同步电机, 螺旋桨推进应用, 矢量控制方法。
I.介绍
反旋转, 也称为同轴反转。反旋转指机构的一部分围绕一个共同的轴,向相反的方向旋转, 通常是为了优化扭矩的影响。例如一些飞机螺旋桨,导致一个活塞或涡轮螺旋桨发动机的最大功率驱动两个螺旋桨相反方向旋转。反旋转螺旋桨在一些船用传输系统中很常见,特别是水下潜艇系统。
传统的电力驱动系统,比如螺旋桨推进系统主要缺点是效率低和噪音大。因为能够改善这些缺陷,反旋转电机作为一个电力推进系统越来越吸引人们的兴趣,来代替传统的电力驱动系统。在文献【3】中,研究并实现了作为电力推进系统的反旋转直流电机。但是,直流电机的换向、温升和寿命短等缺点促使了反旋转交流电机的设计。在各种交流电机中,由于反旋转永磁电机具有高效率、体积小、高功率密度等特点能够成为最好的竞争选择。
永磁同步电机是根据其感应电动势的波形分类,即正弦和梯形波形。正弦型被称为永磁同步电机, 感应电动势为梯形波的电机以永磁直流无刷电机为代表。文献【2】和【5】中提出了反转直流无刷电机的模型和速度控制。这些电机比永磁电机具有更大的功率密度,但是直流无刷电机的功率脉动是一个缺点。所以,在这篇文章里研究了具有正弦电动势波形的反向旋转永磁同步电机,该电机具有更平滑的扭矩。
针对于反转永磁同步电机的控制方法,需要使用效率矢量控制来满足快速性。在矢量控制中,对旋转部件位置的了解是必不可少的,可以通过传感器或者不使用传感器来实现。考虑两个旋转部件,传感器的安装和位置数据传输是主要的问题。一个或两个编码器无法解决这些问题。在第一种方案中, 编码器轴与其中一个旋转部件耦合然后编码器框架耦合到另一个旋转部件上。为了传输旋转部件上编码器的数据,有必要使用滑环组来延长电机尺寸。该方案不仅难以对齐调整旋转件, 而且由于位置传感器的使用, 系统的可靠性也越来越低。在第二个方案,两个固定的编码器独立传输绝对数据位置。在这个方案,滑环被除去了但是仍存在一
资料编号:[3311]



