建筑施工现场构件吊运装备运行预警系统设计与开发毕业论文
2020-02-19 19:58:56
摘 要
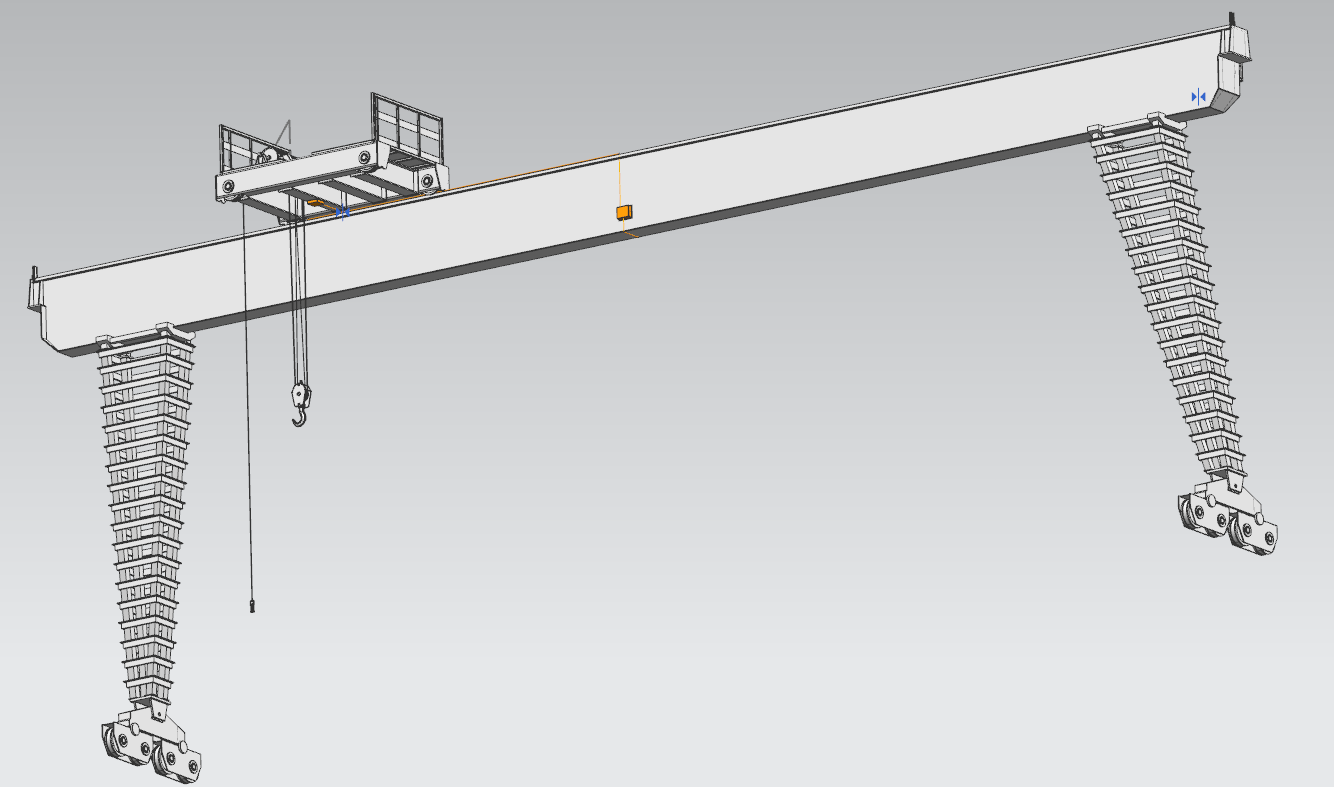
近些年来,随着建筑工业化的飞速发展,模块化建房技术越来越完善,大大节省了人力物力。建筑工业化的趋势是通过预制构件的设计生产使建造房屋变成了组装房屋,但是模块化自动化的组装过程存在着一定的安全隐患,即吊运装备在运行过程中预制构件与障碍物有碰撞的可能,容易造成人员伤亡以及财产损失,由此可见,建筑施工现场吊运防碰撞预警系统对吊运装备运行安全有重要意义。
防碰撞预警系统在各个领域都有着重要的作用,不同的工作环境对防碰撞预警系统有着不同要求。
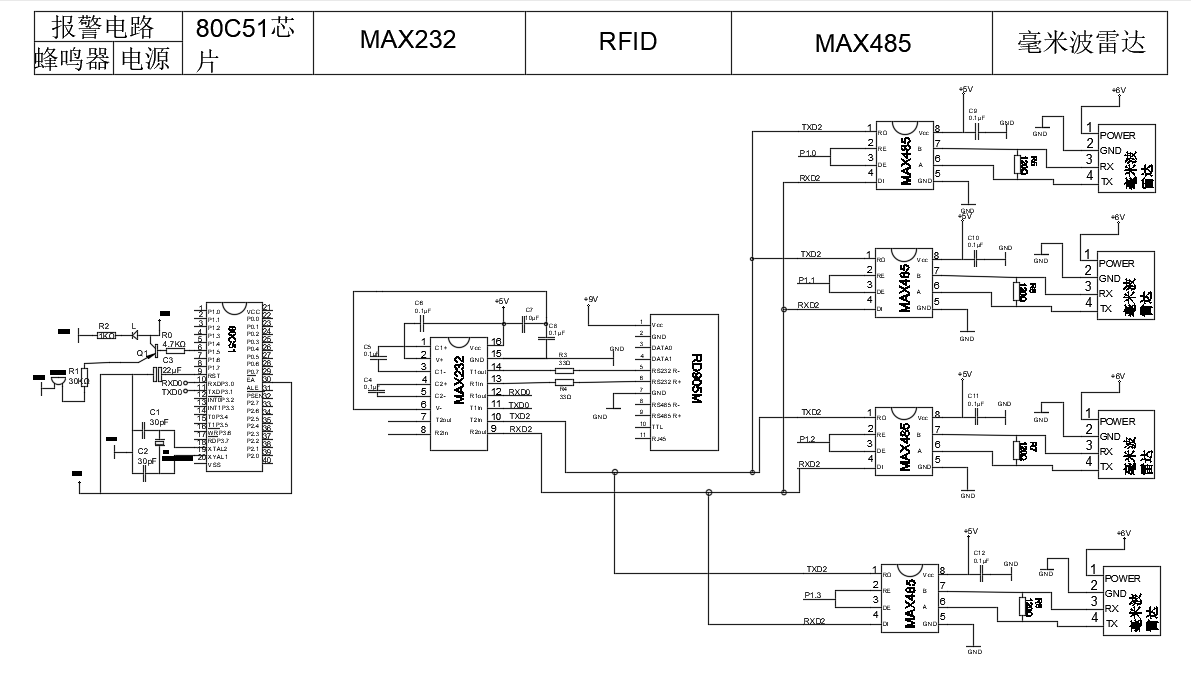
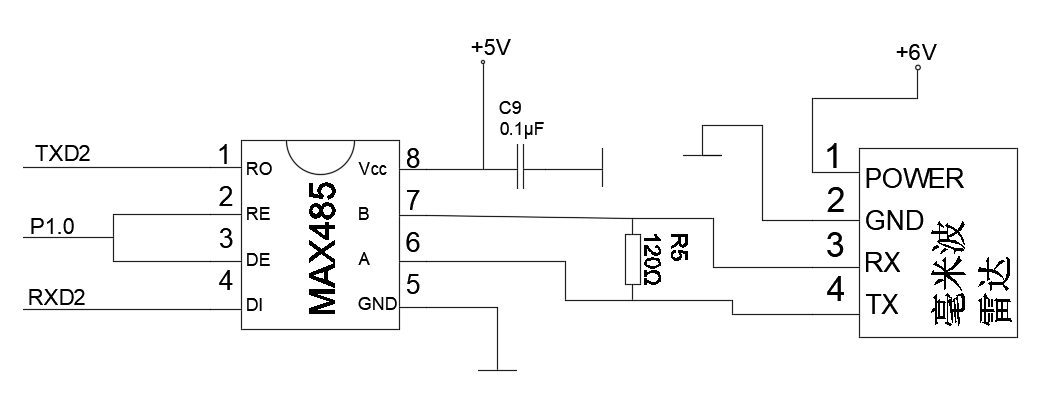
本文介绍了一种建筑施工现场吊运设备运行预警系统的设计方案。该方案采用RFID、毫米波雷达、51单片机、扬声器等,利用毫米波雷达传感器以及RFID获取障碍物的位置信息和预制构件的参数。根据获取的信息,单片机进行数据分析,结合吊运装备安全模型判断是否安全,及时发出声音警报,预防碰撞的发生。
关键词:碰撞预警;毫米波雷达;RFID;单片机;
Abstract
In recent years, with the rapid development of industrialization of buildings, modular building technology has become more and more perfect, which has greatly saved manpower and material resources. The trend of industrialization of buildings is to transform the built houses into assembled houses through the design and production of prefabricated components. However, there is a certain safety hazard in the modular automated assembly process, that is, the prefabricated components collide with the obstacles during the running of the lifting equipment. Possibly, it is easy to cause casualties and property losses. It can be seen that the anti-collision warning system for lifting the construction site is of great significance to the safe operation of the lifting equipment.
Anti-collision warning system plays an important role in various fields. Different working environments have different requirements for anti-collision warning system.
This paper introduces a design scheme for the operation warning system of lifting equipment on the construction site. The program uses RFID, millimeter wave radar, 51 single-chip microcomputer, speakers, etc., using millimeter wave radar sensors and RFID to obtain the position information of obstacles and the parameters of prefabricated components. According to the obtained information, the MCU conducts data analysis, and combines the safety model of the lifting equipment to judge whether it is safe, and promptly emits an audible alarm to prevent the occurrence of collision.
Key words: collision warning; millimeter wave radar; RFID; single chip microcomputer;
目 录
摘 要 I
Abstract……………………………………………………………………………………II
第1章 绪论 1
1.1目的及意义 1
1.2国内外研究现状 2
1.3选题研究内容 5
第2章 构件吊运装备运行预警系统总体设计 6
2.1构件吊运装备运行预警系统功能需求及分析 6
2.2构件吊运装备运行系统总体方案设计 6
2.3构件吊运装备运行系统总体结构设计 8
2.4构件吊运装备运行系统功能模块分析 11
2.4.1障碍物检测模块 11
2.4.2预制构件数据采集模块 12
2.4.3碰撞检测模块 14
2.4.4报警模块 14
第3章 构件吊运装备运行系统硬件选型 16
3.1系统主要控制芯片选型 16
3.2毫米波雷达选型 17
3.3 RFID选型 19
3.4基本输入输出接口选型 20
3.5预警信号发生器选型 22
第4章 构件吊运装备运行预警系统软件设计 23
4.1构件吊运装备运行预警系统软件总体设计 23
4.2数据接收与交换 24
4.2预警方向包围盒算法设计 24
4.3构件碰撞检测算法设计 26
第5章 总结与展望 28
5.1总结 28
5.2展望 28
参考文献 30
致 谢 32
第1章 绪论
1.1目的及意义
近几年,随着人们物质生活的提高,人们对于房屋的需求逐渐增大,传统的整体式建筑已经不能满足人们对更友好生活环境的需求。仅2014年,装配式房屋建造项目接近600万平方米。就建筑工业化,相较于发达国家我国起步较晚,但我国国土面积辽阔,人口众多,人们对房屋的需求量大,这也表明建筑工业化在我国将有很大的发展空间。相较于传统房屋建造,模块化建房更加绿色环保,其预制构件生产率高,损耗小,而且装配式也可避免扬尘的产生。更重要的是在房屋建造过程中,标准化的预制构件极大的避免了因个人因素导致房屋建造的不规范性或者房屋结构上的误差,使房屋的规范性以及安全性大大提高,更加符合消费者的利益。
在房屋建设过程中,建筑工业化大大的缩短其主体建造的时间。以模块化、标准化的房屋组件直接进行拼装,可以减少房屋主体建成的时间,同时也避免了人力资源的浪费。更重要的是建筑工业化可以大大减少建筑垃圾的产生,更加的绿色环保。
在建筑组装过程中最重要的是预制构件的吊运安装过程,其主要内容有准备吊运装备,连接预制构件、连接安全性检查、吊升、下降、对位、入位、堪正安装位置、堆场人员固定、运输司机最终固定等工序。吊运设备与工人在同一环境下工作,由于工人本身或者环境使然,可能会导致被吊运的预制构件与工人发生碰撞,造成人员伤亡。因此针对该安全隐患设计了一套防碰撞预警系统。
从2010年至今,国内装配式建筑发展迅速,尤其是北京、上海、广州、深圳、山东以及合肥等地,大面积推进装配整体式剪力墙住宅工程,结构预制率达40%以上。随着建筑工业化行业的高速发展,装配式建筑自身的发展也有明显改变,如构件吊重越来越大、预制率越来越高、推进区域越来越多、装配式建筑实施高度越来越高等,因此其存在的危险越来越大。但是现如今却没有针对装配式建筑的安全防护装置,这对工人来说是缺乏安全保障的。现有的装配式建筑施工预防措施主要有以下两个方面:第一,装配式建筑施工其吊运过程是按照一定的规定来进行的(系统提前规划路线) ,工人只需避开这些路线即可。但由于施工过程环境复杂,工人很难保证时刻处于吊运路线之外。第二,这一防护措施是建筑施工过程中普遍使用的,即人与人之间直接交互,在预制构件吊运过程中工人之间相互示意,避免发生碰撞。但是,工人之间的交互存在时间差,难以及时避开吊运装备。针对以上情况本课题则进行了很好的应对,具体如下:
(1)本文开发了一种建筑施工现场构建吊运装备预警系统,该系统结构简单能够对吊运装备与工人位置进行实时测算,并且能够对即将来临的碰撞进行预警。
(2)针对吊运装备与工人即将发生碰撞且来不及躲避的情况,本系统提供了一种信息反馈急停的方法,通过信息反馈使得吊运装实现急停避免碰撞。
1.2国内外研究现状
本系统包含硬件部分和软件部分,软件部分采用的是基于包围盒的一种碰撞检测算法,硬件部分则由毫米波雷达、RFID(Radio Frequency Identification)以及蜂鸣器控制电路等组成。现如今在碰撞检测领域各项技术趋于成熟,已然有不少的成果产出。
为了解决自动化码头堆、取料及机械臂间的碰撞问题,尹艳艳,吕崇晓[2]共同开发了一种堆料机防碰撞预警系统。该系统利用GPS定位技术对堆、取料机的机械臂进行实时定位,然后再利用二维方向包围盒将定位的数据进行处理生成包围盒后再进行碰撞检测,以预防堆、取料机的机械臂之间发生碰撞。该系统解决了堆、取料机机械臂间的碰撞问题,使得堆、取料机的运行更加的安全,可靠,有力促进其自动化和智能化的发展。但该系统仅在二维平面进行碰撞检测,不适合复杂情况下的堆,取料机的碰撞检测。
陈志华,姚琳,刘克,刘钢,石璟采用基于包围球的AABB包围盒模型与GJK算法,分别建立了双五轴镜像铣设备的运动模型以及防碰撞算法。更好的解决了双五轴镜像铣的碰撞检测问题,使得其运行精准度得以提升。
为了解决客车侧面和正面碰撞问题,王文杰[6]、刘国兵、陶磊、王浩然、王铭升、孙文宇设计了一种可向驾驶员事先发出声光警告信号的预警系统,系统利用超声波雷达以及毫米波雷达来测定客车与周围障碍物之间的距离和速度,然后系统设置了安全阙值,如果所测得的数据超过了安全阙值则存在危险,系统发出警报,反之,则无警报。该种方式提高了客车的安全性能,但是这种预警方式依赖于驾驶员能否完全按照警报进行相关的操作,故存在一定的隐患。
为了解决电动车路上行驶安全问题郑丽彬[1]、陈林、王化明、李莉莉设计了一种防碰撞预警系统。该系统利用超声波雷达测量电动车与障碍物之间的距离,通过与设定的安全距离进行比较来判断是否发出警报或者紧急制动。该系统解决了路上电动车驾驶员对安全距离把控不好的问题,但是电动车在路上行驶时,周围一般会存在诸多交通工具,这就有可能导致系统判定电动车需要紧急制动而使得电动车无法正常行使。
交通事故的发生原因众多但直接原因大多是驾驶员没能在事故发生前1s进行紧急制动或其他操作,为了解决这一问题,许文娟[7]、赵秋芳、郝鹏飞研究了一种汽车防碰撞预警系统。首先该系统通过超声波传感器来测定汽车与周围人员或其他车辆的距离,而后再将数据上传给微处理器,微处理器将测定的距离与设定的阙值进行比较,判断是否发出警报来提醒驾驶员进行相关的操作。该系统解决了驾驶员不能及时控制车辆的弊端,大大提高了车辆行驶的安全性。
为了防止追尾以及开车门碰撞到行人的问题,贾蕴发[10]、刘杨、李超、梁龙设计了一种基于多传感器的汽车防碰撞及行人保护预警系统。该系统分为防追尾、防开门碰撞两个部分,防追尾部分是通过激光传感器对车后方的其他车辆进行距离上的一个测定,然后再与安全距离进行比对,如低于安全距离则会对车内人员发出警报。防开门碰撞是指当车内人员开车门时,通过超声波传感器来对车外的人员进行距离测定,如有车外人员距离车门过近微处理器判定有碰撞的可能,那么微处理器就会给警报装置发送信号以对车外人员起到警示作用。
汽车在行驶过程中,低能见度的天气会极大的削弱驾驶员的视觉,为了能够在低能见度的情况下实现准确的预警,避免交通事故的发生,曹佳宝[11]、刘灿、韩倩、魏文艺设计了一种基于毫米波雷达的主动防碰撞预警系统。该系统通过毫米波雷达传感器测量出车与车之间的相对位置关系,再将不同的车辆以不同的颜色显示在显示屏上,使得驾驶员能够得知各个车辆的位置以及危险程度。该系统解决了其他系统不能作用于非危险情况以及不能给驾驶员提供辅助作用等问题。大大提高了驾驶员在驾驶车辆过程中对周围环境的掌控能力,使得驾驶车辆更加的安全。
为了防止水电工程项目中大型施工设备之间发生碰撞,黄建文[8]、祝建军、张婷设计了一种基于GPS/RFID组合定位的缆机塔机防碰撞预警系统。该系统利用RFID的定位数据以及GPS的定位数据的组合定位极大的提高了塔机的定位精度,避免了仅GPS定位时因环境问题导致GPS接收信号不稳定的问题,使得塔机的运行更加的安全,可靠。
为了应对多路况下的汽车行驶以及行人的安全问题,刘树峰[11],吕钊钦研究了一种多路况下汽车防碰撞及行人保护预警系统。该系统利用毫米波雷达预警系统实现对车辆纵向的安全保护,利用超声波雷达来测定车辆横向的障碍物确保车辆横向安全,根据不同的路况来设定不同的模型配合汽车进行安全距离的计算,运用多个传感器来确保驾驶人员的驾驶状况,以尽量避免系统错的报警概率;并且系统具有较高的环境适应性,能够极大的提高汽车行驶的安全性。
农村交叉口,正在离开小路的右转弯驾驶员可能会选择一个不合适的间隙,随后可能会与另一辆接近的车辆发生追尾事故。为了解决这一问题Dabbour E[22]和Easa S研发了一种双向停车控制系统。该系统是通过GPS进行实时定位,收集汽车转弯数据,而后处理器加以分析来判定转弯是否有碰撞危险。此系统使得驾驶员在行使转弯过程不再总是依赖人体视觉,提高了驾驶的安全性。
为了解决因鸟类迁徙而导致的鸟与飞机之间的碰撞,Van Gasteren H[23] ,Krijgsveld K L 和Klauke N分析了一种军用探测系统对避免碰撞的影响。该探究是利用军用航空鸟类迁徙检测系统对鸟类进行检测,而后在分析其数据得出鸟类迁徙与飞机等的碰撞概率,而后可以避免碰撞概率较高的时间及地点来避免碰撞的发生。
为了解决车辆追尾问题,吴经贤[12], 李颖, 胡妮娜设计了一种基于AT89S52的车辆防追尾预警系统。该系统由声光报警模块以及激光测距模块组成,车辆在行驶过程中激光测距模块首先会测定车与车之间的距离,而后会根据前后车辆或者障碍物的运动状况(静止、减速运动、加速运动)来设定安全距离,最后再通过激光测距模块测得的距离与安全距离相比较来判断是否有追尾的可能,如果有追尾的可能则发送信号给声光报警模块,发出警报。该系统跟据障碍物处于不同运动状态来设定安全距离是比较符合实际的一种方式,能够更好的切合实际情况,避免发生追尾。
车辆转弯防碰撞预警控制是智能控制方面的一个难点,为了解决这一问题张学军[24]、郑丽英研发了一种汽车弯道前方碰撞预警控制系统。该系统利用雷达的测角,测距功能来确定障碍物的位置,而后利用模糊控制算法来对车辆进行碰撞预警(通过车速来判定通过弯道的速度,提醒驾驶员进行相关操作)。该系统解决了弯道防碰撞预警系统的控制问题,大大提高了驾驶员驾车过弯的安全性。
大型的水电工程需要众多的施工设备,纵横交错的施工设备之间容易发生碰撞,一旦发生碰撞就会造成大量的财产损失和时间的浪费,所以就需要解决大型设备之间的碰撞问题。为了解决这一问题,夏大勇[26], 熊雄, 朱洪强设计了龙滩水电工程大坝施工设备防碰撞预警系统。该系统利用GPS定位系统来确定运动部件的位置,控制中心根据GPS发送的数据进行处理,判断是否有发生碰撞的可能并及时将结果发送给设备操纵人员,而后操纵人员再根据实际情况来进行相应的操作,进而避免碰撞的发生。该系统通过定位技术来进行防碰撞预警,极大的提高了大型设备的运行安全性,避免了财产的损失。
一般的车辆防碰撞预警系统都是通过预警系统发出碰撞警报给驾驶员或者行人,该种方式依赖于驾驶员的驾驶状况以及行人的自身状况。为了解决这一问题,张甜[28]、陈德海研发了一种车辆防碰撞预警及自动刹车系统。该系统利用超声波测距系统来测定障碍物与车辆之间的距离以及相对速度,进而设定安全阙值。中央处理器判断车辆与障碍物之间是否有碰撞的可能,若存在碰撞的可能则系统发出警报警示驾驶员,随着碰撞可能性的加大警报的力度也会加大。系统在车辆处于不同状况时运行状况也会不同,当汽车处于转向时警报装置可能会被抑制。当驾驶员处于非正常驾驶状况或车辆处于极度危险的状况时,防碰撞预警系统甚至会使车辆发生紧急制动。该系统不光可以判断是否有碰撞的可能,同时也会判断可能性的大小,最重要的是在紧急的状况下可以紧急制动,做最后的保障。
1.3选题研究内容
本文旨在设计一种集碰撞检测、预警、信息反馈于一体的预警系统。主要研究内容如下:
(1)根据建筑施工现场构件吊运过程的实际情况,分析建筑施工现场构件吊运过程中安全防护的实际需求,完成建筑施工现场构件吊运装备运行预警系统的总体方案。
(2)根据实用性、经济性原则完成建筑施工现场构件吊运装备运行预警系统的电气硬件选型。
(3)绘制建筑施工现场构件吊运装备运行预警系统的电气控制原理图及硬件装配电路。
(4)对构件吊运装备运行预警系统进行控制系统设计,确定其控制系统软件结构和算法的设计内容。
第2章 构件吊运装备运行预警系统总体设计
2.1构件吊运装备运行预警系统功能需求及分析
跟据施工现场实际要求,系统需具备辨识障碍物、确定预制构件基础数据、碰撞分析以及警报等功能。
首先,当预制构件被装上吊运装备时,系统需要具备扫描或者读取预制构件基础数据的能力;其次在辨别障碍物方面,系统需要具备预制构件在运动过程中,能够确定障碍物与预制构件的相对位置;而后,系统需要具备判断预制构件与障碍物之间是否有发生碰撞的可能;最后,系统应该要根据判断的结果发出相应的信息,若有碰撞的可能,则需要警报装置发出警报信息,警示工作人员。
2.2构件吊运装备运行系统总体方案设计
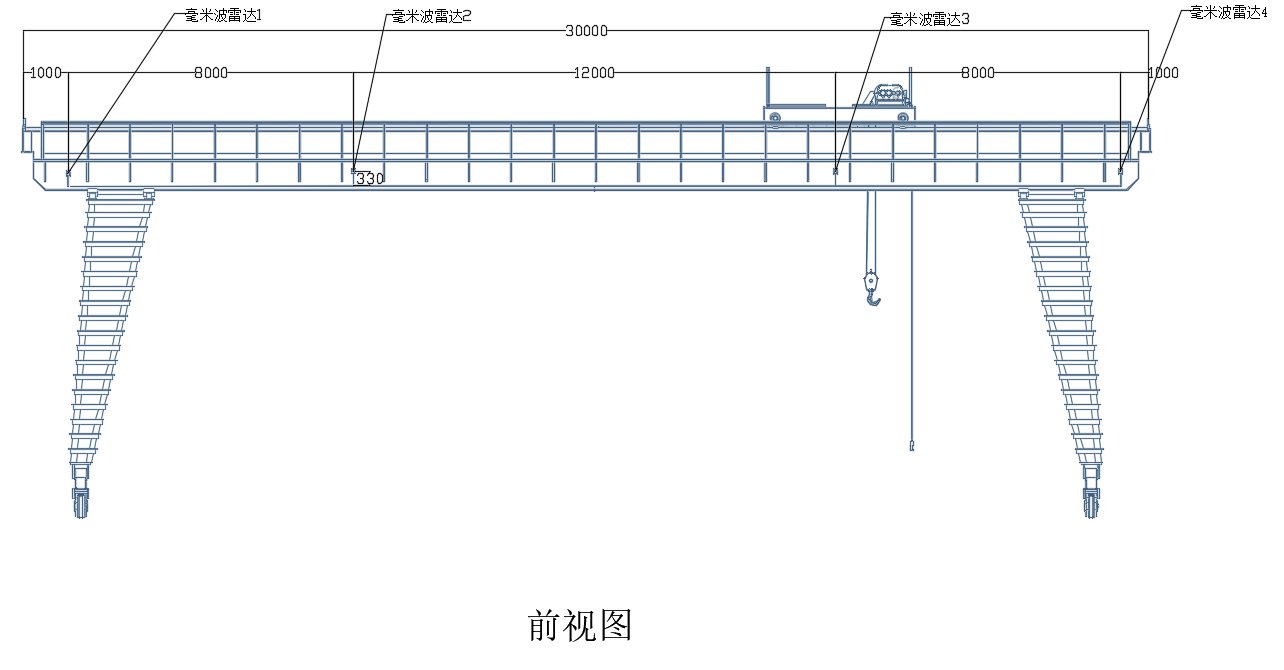
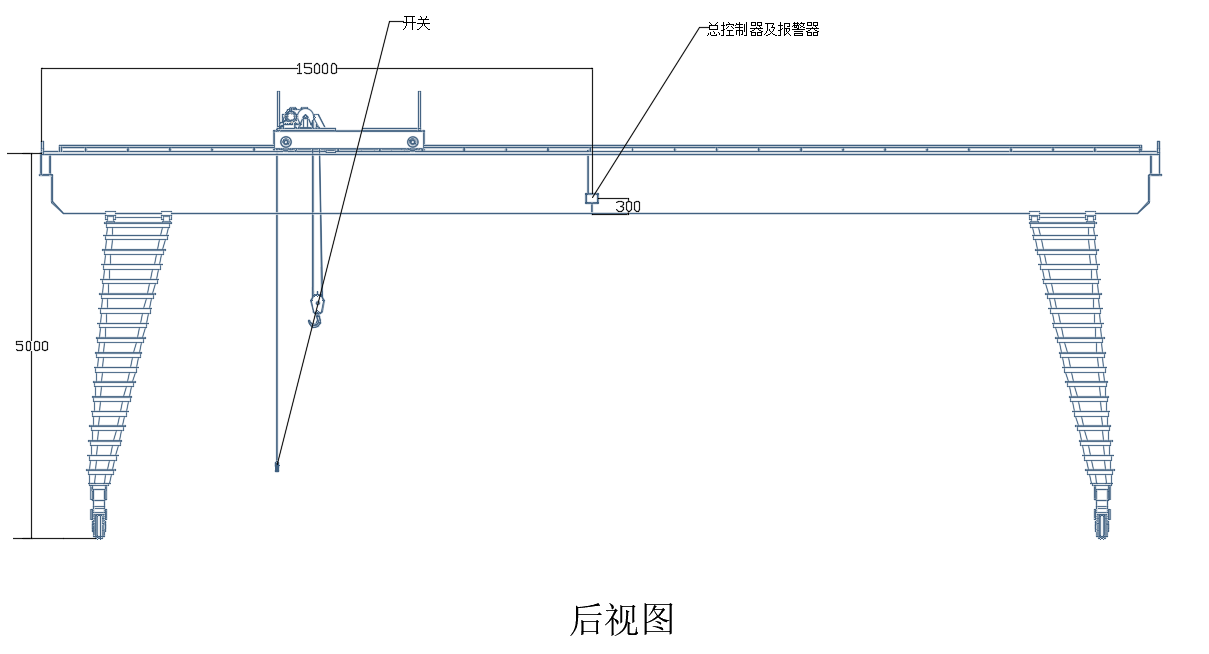
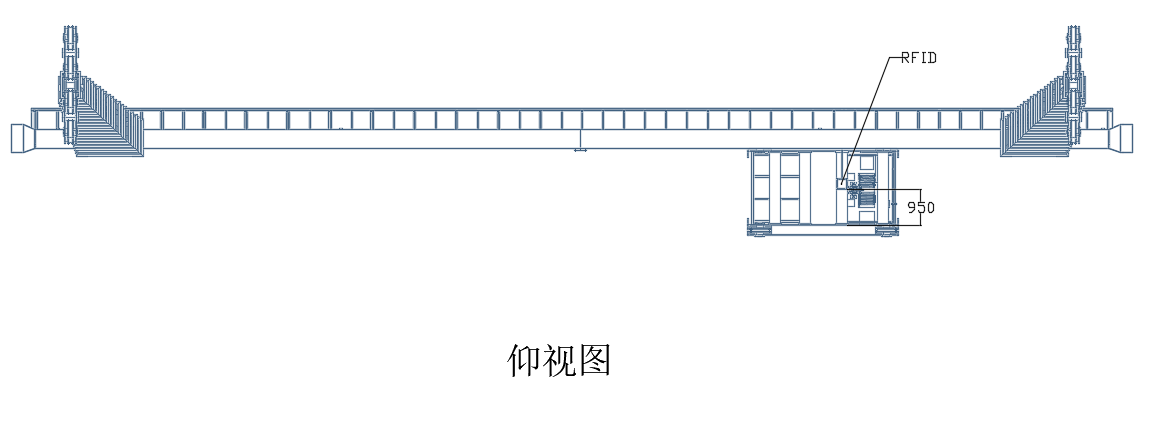
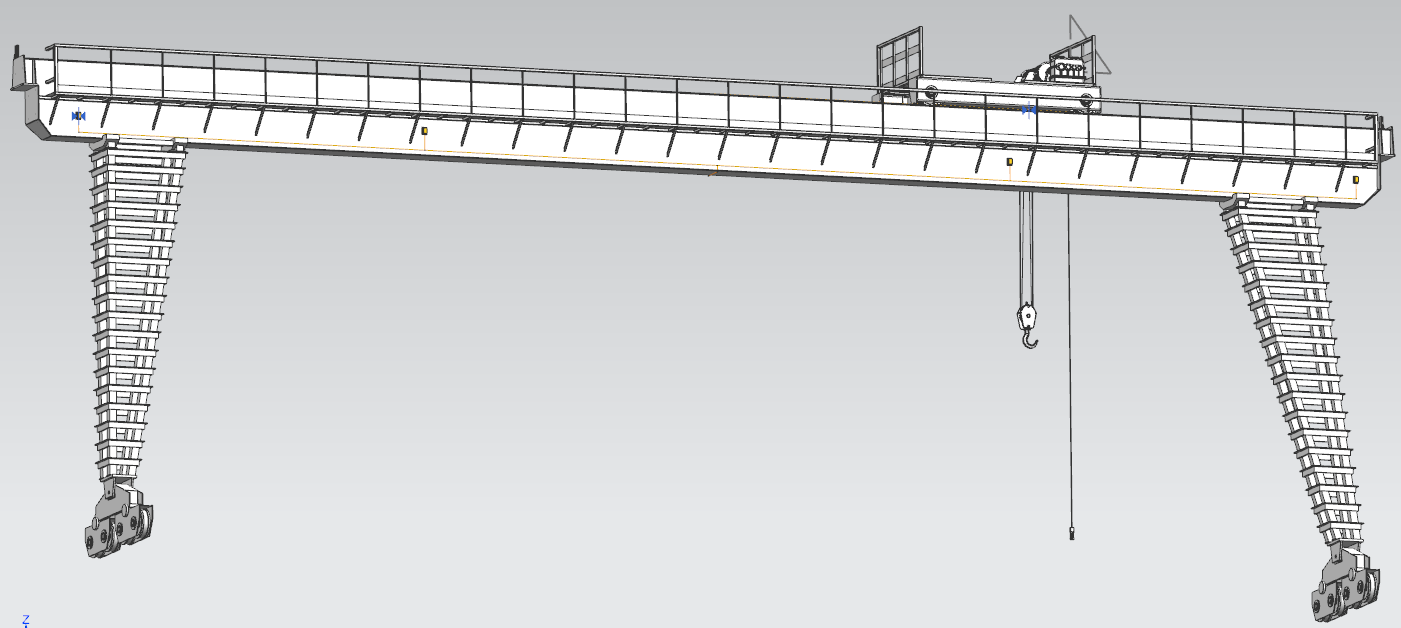
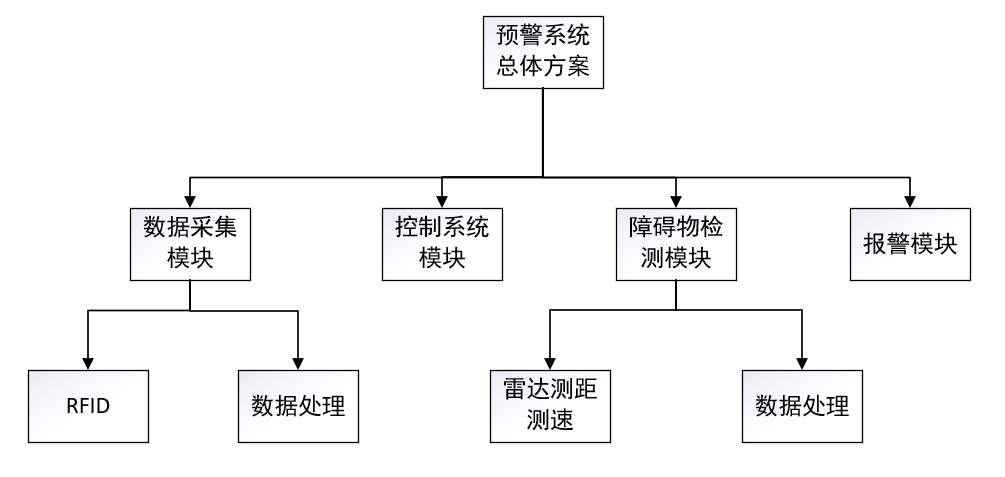 建筑施工现场吊运装备防碰撞预警系统主要分为四个模块,一是读取预制构件基本参数的数据采集模块,二是检测障碍物的距离和相对速度的检测模块,三是控制整个系统的控制模块,四是用于发出警报的报警模块。预警系统总体方案如图2.1所示。
建筑施工现场吊运装备防碰撞预警系统主要分为四个模块,一是读取预制构件基本参数的数据采集模块,二是检测障碍物的距离和相对速度的检测模块,三是控制整个系统的控制模块,四是用于发出警报的报警模块。预警系统总体方案如图2.1所示。
图2.1 预警系统总体方案
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: