基于PROE的空间曲线啮合轮的三维建模仿真毕业论文
2020-05-28 07:02:56
摘 要
PROE首先定义了参数化设计的概念,每一位用户都可以根据自身的需要来选择草图以及零件的制作,PROE的整个运行采用的是模块化的方式,它可以方便便捷的将生产和设计完美的融合在一起。而且PROE用单一的数据库解决了相关问题,实体的再生也可以通过参数的改变来实现而不需要重新设计。
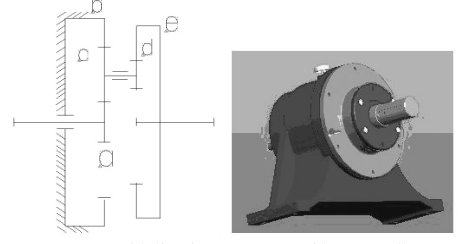
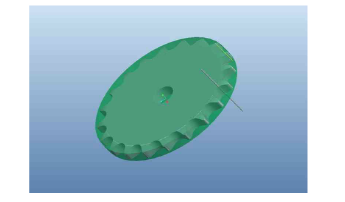
此课题的研究方向是利用PROE软件来完成空间曲线啮合轮的参数化以及三维建模,空间曲线啮合轮是一种有别于传动的齿轮的新型传动机构。首先要根据啮合轮的要求对主动轮钩杆与从动轮钩杆进行建模。然后在PREO组件的模块中把其装配好,最后对装配好的空间曲线啮合轮机构进行速度和位置的分析,实现钩杆的传动。
关键词 空间啮合轮 三维建模 运动仿真
Three dimensional modeling and analysis of spatial mesh wheel based on PROE
Abstract
PROE first defines the concept of parametric design, each user can according to their own needs to select the sketch and parts fabrication, using PROE to run the entire is modular, it can be convenient to design, manufacture and perfect fusion together. And PROE with single database to solve the related problems, regeneration of the entity can also through changing the parameters to achieve without the need to re design.
The research direction of this project is to use PROE software to complete the parametric and 3D modeling of the space curve meshing wheel, and the space curve meshing gear is a new type of transmission mechanism which is different from the transmission gear. According to the first gear requirements on the driving wheel and the driven wheel hook hook rod model. Then it is assembled in the module of PREO module, and finally, the analysis of the speed and position of the meshing wheel mechanism is carried out.
Key words space meshing wheel 3D modeling motion simulation
目录
基于PROE的空间啮合轮的三维建模与分析 I
摘要 I
第一章 绪论 1
1.1 基于PROE与ANSYS的空间啮合轮的三维建模与仿真的国内外研究现状 1
1.1.1基于PROE与ANSYS的空间啮合轮的三维建模与仿真的概述 1
1.1.2基于PROE与ANSYS的空间啮合轮的三维建模的基本方法 5
1.2 本文的主要内容 6
第二章 空间啮合轮建模的基本原理 7
2.1空间曲线啮合轮的基本介绍 7
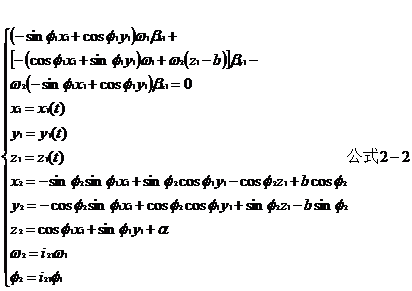
2.2空间曲线啮合轮钩杆的参数及其设计公式 7
2.2.1 主动轮及其钩杆参数的设置 7
2.2.2 从动轮及其钩杆参数的设置 8
第三章 空间曲线啮合轮的建模 9
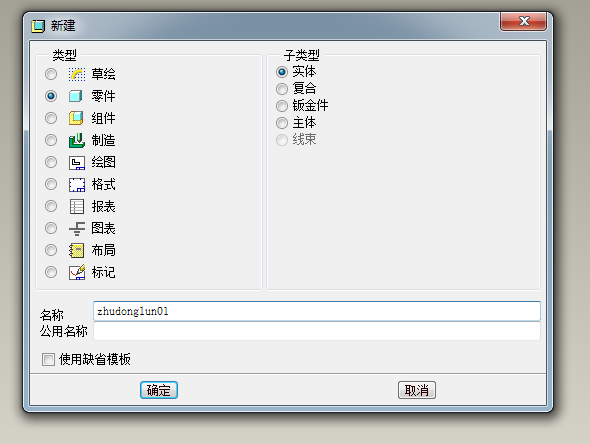
3.1主动轮基体及其钩杆的建模 9
3.1.1 主动轮钩杆建模 9
3.1.2 主动轮基体的建模 12
3.2从动轮基体及其钩杆的建模 13
3.2.1从动轮基体建模 13
3.2.2从动轮钩杆建模 14
3.3本章小结 17
第四章 空间曲线啮合轮的仿真 18
4.1 空间曲线啮合轮的仿真 18
4.2 空间曲线啮合轮的仿真 22
4.3本章小结 31
第五章 总结 32
5.1 总结与展望 32
参考文献 33
致谢 35
第一章 绪论
1.1 基于PROE与ANSYS的空间啮合轮的三维建模与仿真的国内外研究现状
1.1.1基于PROE与ANSYS的空间啮合轮的三维建模与仿真的概述
此课题的研究方向是利用PROE软件对主动与从动轮的钩杆进行建模,然后运用仿真学的模块进行仿真,最后利用ANSYS进行速度受力的分析。PROE软件是美国PTC公司旗下的一体化的三维软件,首次提出了参数化的概念,并且使用单一的数据库来解决关于特征的问题。另外,它采用的模块化方式,可以使用户根据自身的需要来选择,而不必安装所有模块。PROE软件有以下三个主要特性
- 参数化设计
每一个产品无论是多么的复杂我们都可以对其进行分解,分解成一个有限数量的组件特性,并且每个组成特性可以完全受限于有限的参数,这是参数的基本概念。
2. 基于特征建模
在PROE中,用户自己若要改变模型,可以通过改变草图来设置,而且PROE本身具有模型系统,例如倒角,圆角等等,这些特征具有智能特性,所以这给使用者带来了很大的方便。
3. 单一数据库
PROE的数据库与传统CAD/CAM的数据库相比较而言,PROE采用的是单一数据库,这就意味着当在设计造型时,若有一处发生改动,那么整个设计都能发生相应的改变,省去了重头修改的时间,这种单一数据库的建立可以大大提升工作效率,并可以挺高产品的质量。
本课题主要研究空间啮合轮钩杆的建模过程以及后期的仿真,具体研究内容是根据啮合轮的曲线方程对其进行建模,然后进行速度与受力的分析。本课题的重点在于建模完成后仿真学模块的分析。
王鹏飞[1]主要阐述了在ANSYS环境下的渐开线斜齿轮三维建模方法。文章中精确渐开线的建立是通过查询文献中的表格来得到的,这样就更容易掌握。他利用这种方法来进行渐开线斜齿轮的三维建模,并对建模完成后的齿轮进行了模态分析。图1.1是斜齿轮的基本参数
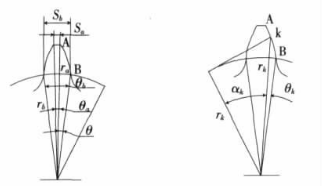
相关图片展示: