机器人系统非标夹具设计及控制毕业论文
2020-05-26 20:47:12
摘 要
机器人夹具是一个由多个自由度组成的在空间中运动的机械装置,所以就要求必须具有很灵活的运动方式以及运动的准确性,而且要保证运动时动态性能的平稳性。因此,除了需要满足高强度、高刚度、高可靠性外的这些基本的条件外,还要求所设计的夹具具有灵巧的结构,良好的动态平稳性。本次毕业论文将焦点集中在机器人夹具的结构方面的研究,机器人控制装置的设计,以及上下料设备的设计,利用SOLIDWORKS软件进行三维建模;用CAD绘制出根据SW装配起来的装配二维图以及重要零部件的零件图。
关键词:机器人 夹具 SOLIDWORKS
Abstract
Robot gripper is a mechanical device consisting of a multiple degree of freedom in space motion, so must have very flexible mode of motion and movement accuracy, but also to ensure motion dynamic performance of stationarity. Therefore, in addition to the need to meet the high strength, high stiffness, high reliability outside of these basic conditions, but also for the design of the fixture has a smart structure, good dynamic stability. This thesis will focus on the research on the structure of the robot gripper, controlling a robotic device design and cutting equipment design, using SolidWorks software for 3D modeling; CAD draw according to the SW assembly of 2D assembly drawing and important parts of the parts diagram.
Key Words: robot; fixture;SOLIDWORKS
目录
摘要 I
Abstract II
第一章 绪论 1
1.1 机器人概述 1
1.2 机器人的国内外发展历史和现状 3
1.3 机器人的应用与发展趋势 5
第二章 夹具设计 7
2.1 工件的分析 7
2.2 机器人夹具设计要求 7
2.3 工件的装夹与夹具 7
2.4各零部件的作用 10
2.5夹具的工作原理 11
2.6挂钩危险截面剪切力的计算 11
2.7工件的上下料装置 12
2.7.1设计内容 12
2.7.2 控制要求 12
2.7.3总体方案的确定 13
2.7.4控制系统软件设计 15
第三章 驱动系统与控制系统设计 17
3.1驱动方式的选择 17
3.1.1机器人驱动系统的要求: 17
3.1.2机器人驱动的选择 17
3.1.3气缸的控制设计 17
3.1.3气缸夹紧力的计算 18
3.2控制系统方案设计 18
3.2.1控制系统方案分析 18
3.2.2控制系统的特点 19
3.2.3 PLC的选择 19
第四章 SOLIDWORKS在本设计中的作用 22
4.1 SOLIDWORKS软件在机器人夹具设计中的应用 22
4.2 SOLIDWORKS的优点 22
第五章 总结 24
参考文献 25
致谢 26
第一章 绪论
1.1 机器人概述
机器人的特点是拥有人体上半部分某些器官的运行功能,它是接受程序的控制,自动运行的装置。机器人的功能是用机器代替人手的劳动,把目标工件由一个地方移向另一个地方的工作位置,实行装卸、加工、装配等生产作业,使简单乏味的体力劳动能够由机器来完成,进一步实现生产的机械化。机器人具有明显的特征:首先它是一类机械电子设备;机器人所运行的动作有相似与人或者是其它某些动物的行为;;第二点是可以通过编程来执行某种工作,使其具有一定的通用性和灵活性,而且还具有一定的智能的特点,能够在程序的控制下自主地完成一些特定的操作。机器人类型一般分三大类。第一种类型是不需要人来控制操作面板的通用类型的机器人 。它是一种独立的、不依赖于某一主机的设备,可以根据需要执行的任务进行程序的编制,以完成我们所需要的各项规定操作。它是一类不但拥有普通机械方面的物理特性,而且还具有一般机械、记忆智能的功能。第二种类型是需要由人来操作的机器人,我们将其简称为操作机。在原子发展的形成来源、军工行业,首先通过机器的运作,完成该计划下的工作要求,后来与促进和发展的技术,使用无线电信号来操作机器人高端工作。例如月球探测、火星水资源的寻找等。工业生产中所采用的锻造机器也属于这一范畴。第三种是专门用在某些生产活动中的机器人,我们将其简称为专用机,这类机器人的特点是依附于自动化机床或各类型的生产线上,用此机器人来解决机床的上下料问题或者是工件传送方案的解决。机器人按照结构形式的不同,又可以划分成多种类型,最具有代表性的是具有关节形式的机器人,它的有点是结构比较紧凑,所占据的操作空间小,而且它的相对工作区域很大,更甚的是,它们可以绕过机器人旁边的一些障碍物,因为它具有的这些其它机器无法比拟的特点,所以这种类型的机器人被广泛的应用在了许多生产行业当中去
。它是一种独立的、不依赖于某一主机的设备,可以根据需要执行的任务进行程序的编制,以完成我们所需要的各项规定操作。它是一类不但拥有普通机械方面的物理特性,而且还具有一般机械、记忆智能的功能。第二种类型是需要由人来操作的机器人,我们将其简称为操作机。在原子发展的形成来源、军工行业,首先通过机器的运作,完成该计划下的工作要求,后来与促进和发展的技术,使用无线电信号来操作机器人高端工作。例如月球探测、火星水资源的寻找等。工业生产中所采用的锻造机器也属于这一范畴。第三种是专门用在某些生产活动中的机器人,我们将其简称为专用机,这类机器人的特点是依附于自动化机床或各类型的生产线上,用此机器人来解决机床的上下料问题或者是工件传送方案的解决。机器人按照结构形式的不同,又可以划分成多种类型,最具有代表性的是具有关节形式的机器人,它的有点是结构比较紧凑,所占据的操作空间小,而且它的相对工作区域很大,更甚的是,它们可以绕过机器人旁边的一些障碍物,因为它具有的这些其它机器无法比拟的特点,所以这种类型的机器人被广泛的应用在了许多生产行业当中去 。
。
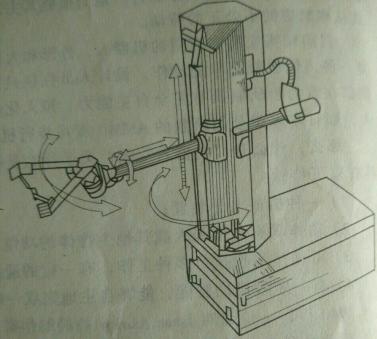
生产制造业中常用的工业机器人,它的结构大部分都是由三个系统组成 ,我们将其概括为机械系统、驱动系统以及控制系统,如图1-1所示,机械系统是接收到来自控制系统所发出的控制信号进行运作,动作所需要的动力源是来自驱动系统。
,我们将其概括为机械系统、驱动系统以及控制系统,如图1-1所示,机械系统是接收到来自控制系统所发出的控制信号进行运作,动作所需要的动力源是来自驱动系统。

相关图片展示: