10公斤级上下料桁架机器人机械设计毕业论文
2020-07-16 20:21:40
摘 要
随着工业机器人技术的发展,其引起了人类在生产和生活方式上的巨大变化,尤其是上下料桁架机器人的出现,解决了传统人工上下料效率低下与产品质量难以保证等问题,在柔性生产线、自动化生产等领域,占据着越来越重要的地位。
在数控机床应用领域,上下料桁架机器人技术的重要地位。本文将10公斤级上下料桁架机器人作为对象进行设计与分析,其最主要的支撑结构是竖轴、横梁和托板。结合桁架机器人的操作对象10kg单级圆柱齿轮减速器来确定实际工况,对桁架机器人进行机械设计。首先,针对实际工况,对桁架机器人的外形框架进行设计,确定其尺寸参数;其次,对桁架的主要部分如机械手爪、进给系统进行详细的设计计算;再次,结合实际工况,对桁架机器人的主要支撑部件进行受力分析及强度校核;最后,使用有限元分析软件SolidWorks simulation对横梁和竖轴进行静力分析及模态分析,并对结果进行简单的说明。
关键词:工业机器人 上下料桁架机器人 单级圆柱齿轮减速器 SolidWorks simulation 静力分析 模态分析
Abstract
With the development of industrial robot technology, it has caused tremendous changes in human production and lifestyle, especially the emergence of loading and unloading truss robots, which solves the problems of low efficiency of traditional manual loading and unloading and difficult guarantee of product quality, etc., in flexible production lines. , Automated production and other fields occupy an increasingly important position.
The research on loading and unloading truss robot technology is an important basis for its industrial application. In this paper, the 10kg truss robot is designed and analyzed as the object. Its main support structure is the vertical axis, beam and pallet. Combine the truss robot's operation target 10kg single-stage cylindrical gear reducer to determine the actual working conditions and mechanically design the truss robot. Firstly, according to the actual working conditions, the frame of the truss robot is designed to determine its size parameters; secondly, the main parts of the truss robot, such as the mechanical gripper and the feed system, are designed and calculated in detail; again, combined with the actual operating conditions, the main supporting parts of the truss robot were subjected to force analysis and strength checking. Finally, the finite element analysis software SolidWorks simulation was used to perform static analysis and modal analysis of the beam and vertical axis, and the results were briefly explained.
Keywords: industrial robot; loading and unloading truss robot; single-stage cylindrical gear reducer; SolidWorks simulation; static analysis; modal analysis
目录
摘要 I
Abstract II
第一章 绪论 1
1.1前言 1
1.2桁架机器人的结构及工作原理 1
1.2.1结构形式: 1
1.2.2工作原理 2
1.3当前的状况及未来的趋势 2
1.3.1当前的状况 2
1.3.2发展趋势 3
第二章 桁架机器人总体设计 5
2.1 上下料工件及机械手工艺性分析 5
2.1.1 工件加工特点 5
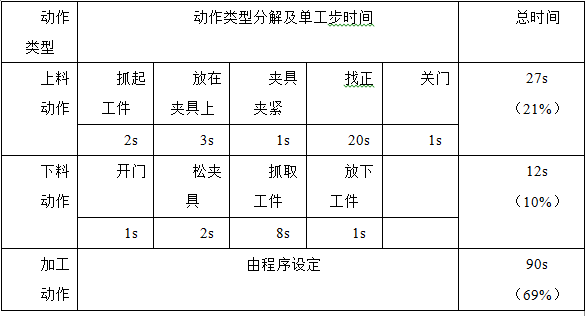
2.1.2 工件生产节拍的分析 5
2.2 工况的确定 6
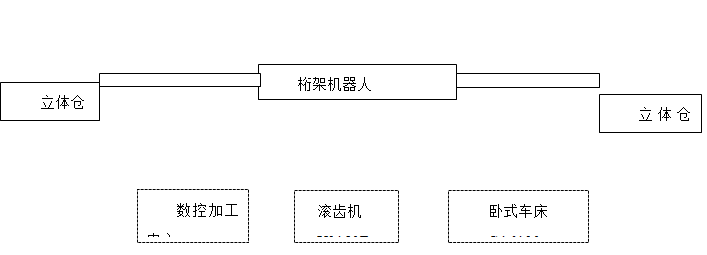
2.3生产线的布置形式和工作流程 7
2.4 桁架机器人机械机构设计 8
2.4.1 桁架机器人的组成 8
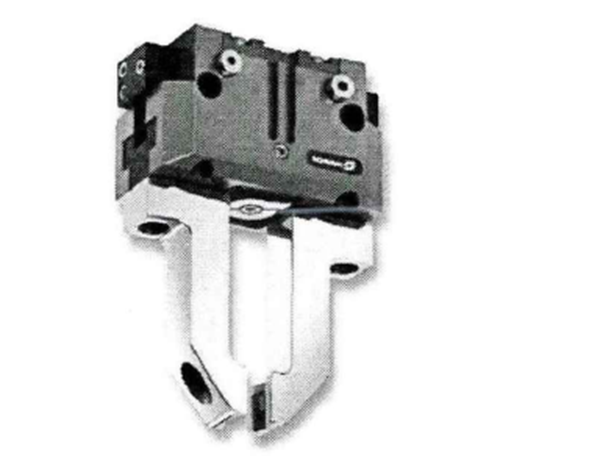
2.4.2机械手爪设计 8
2.4.3 外形框架的设计 10
2.4.4 传动系统的设计 11
2.4.5 润滑系统的设计 12
2.5 经济型分析 13
第三章 桁架机器人机械设计 14
3.1 桁架的尺寸参数 14
3.2 机械手的设计 15
3.2.1 机械手的参数 16
3.2.2 机械手爪部分的设计计算 16
3.2.3 机械手腕部的设计计算 19
3.3 进给系统的设计 21
3.3.1 横梁进给系统的设计计算 21
3.3.2 竖轴进给系统的设计 23
3.4 桁架机器人的动态分析 24
第四章 桁架机器人有限元分析 26
4.1桁架机器人的受力分析 26
4.4.1 横梁的受力分析 26
4.1.2 托板的受力分析 29
4.2 有限元分析软件简介 30
4.3 静应力分析 32
4.3.1 模型的简化 33
4.3.2 网格划分 34
4.3.3 添加约束和载荷 34
4.3.4 运算算例与结果顾问 35
4.4 模态分析 37
4.4.1 模态分析过程 38
4.4.2 结果计算与分析 39
第五章 总结与展望 40
5.1 总结 40
5.2 工作展望 40
参考文献 42
致谢 44
第一章 绪论
1.1前言
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,它可以接受人类的指挥,也可以按照预先编排的程序运行,甚至可以根据人工智能技术制定的原则纲领工作[1]。目前,按照工业机器人的机械手的运动形式可以将其分为四种:多轴机器人、圆柱坐标机器人(SCARA)、串联和并联机器人和坐标机器人。本轮文要的研究对象——上下料桁架机器人就属于直角坐标型机器人的一种。作为工业机器人的一种,桁架机器人从外形上看,它是一种开链式结构,主要由柔性关节构成的刚性连杆组成,与人类的手臂非常的类似。里面的刚性连杆就如同人身体上的骨骼,相似于人的胸、上臂和下臂,工业机器人的柔性关节相当于人身上的肩关节、肘关节和腕关节。末端执行器通常被叫作“手”或“手爪”,一般装在操作手臂的前端,其一般根据实际工作需要选择对应的手指,手指可以执行“开”与“合”两个动作,以此来完成工件的抓取。机械手臂的动作幅度一般较大,以便实现“宏操作”。
桁架机器人的出现使得传统的物流方式发生了变化,改善了生产车间环境,使得数字化、信息化、无人化管理零件加工工厂的出现成为可能,并且有力的保证了产品的质量,提高了劳动生产率,让工人不必再从事单一繁重的体力劳动,使现代制造技术紧随人类社会的发展步伐。随着我国社会的不断发展,我国将会面临着越来越严峻的就业形势,成本的不断上涨以及持续出现的招工难等问题,也在不断的迫使相关的企业做出改革,而智能化生产就是一个很好的改革方向。
1.2桁架机器人的结构及工作原理
1.2.1结构形式:
桁架机器人是一种建立在空间直角坐标系中的龙门式工业机器人,它能够调整工件的工位或改变工件的运动轨迹。桁架机器人可以根据加工对象的加工特点及工况将相应的机床组合成一条独立的生产单元,以便实现零件的数字化、批量化生产,从而降低生产成本及提高产品质量。
1.2.2工作原理
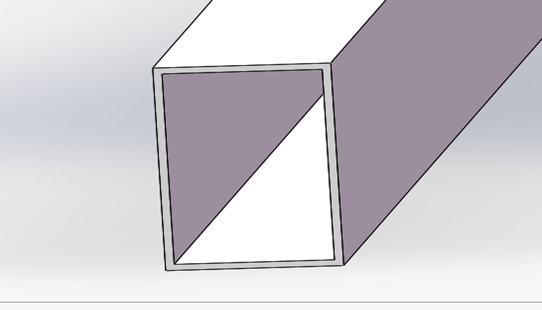
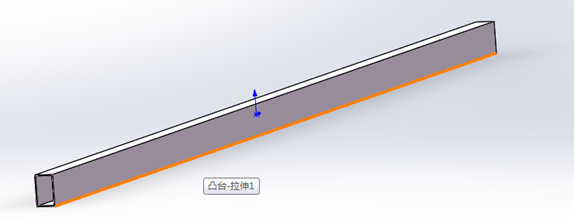
桁架机器人能以高的速度、高的精度完成产品的搬运、工具的操作,它的防尘、防污性能优于其他类型的工业机器人,特别是在对轴承类工件进行车削、钻孔加工及相关物料的搬运方面能够达到数控机床单元的要求。桁架机器人一般是由铝型材、滚轮导轨、伺服电机、气缸等组成的多维度行走轴搭建而成,其相关截面尺寸通过有限元分析来选择优化,以保证在实际生产活动中保持一定的强度和刚度。桁架机器人的传动部件有滚珠丝杠、齿轮齿条和同步带三种类型。桁架机器人横梁、竖轴的材质一般选用型材或方钢,运动传动部件采用导轨滑块和齿轮齿条,利用有限元来优化设计运动部件和横梁、竖轴立柱的截面形状。
相关图片展示: