平移式机械手机械系统的设计毕业论文
2020-06-20 19:23:26
摘 要
机械手做为一种自动控制装置,能够模拟人的手和手臂的做相似的动作。它是一种在固定程序中执行、抓取、移动或操作的工具。机器人是设计用来的替代人完成枯燥单调,繁重的工作任务的并可以自行完成完出工作任务的机械装置。机械手由于其不可替代的诸多优势被各个行业广泛应用。本文设计一种机械手的机械系统,它拥有两个自由度,坐标方式为直角坐标式,并且用于教学和实验。在阅读关于课题的文献资料后,研究课题要求并进行计算分析,构思好机械手的整体结构以及各个组成零部件的设计与选型,绘制出本设计的装配图以及零部件图纸。该机械手主体由手部、伸缩臂及升降臂组成。一个夹持器与一个液压缸组成手部执行对物件的抓取,伸缩臂与升降臂也由两个液压缸驱动完成机械手的伸缩与升降功能。本文通过对机械手的机械结构和液压驱动部分的设计,理论上实现了两个自由度直角坐标平移式并主要用于教学实验的机械系统的设计。
关键词:机械手 机械系统 液压
The design of translational manipulator mechanical system
Abstract
The robot is an automatic control device that mimics some of the movements of the human hand and arm. It is a tool for executing, crawling, moving, or manipulating in a fixed program. The robot is designed for use as an alternative to the completion of the boring, monotonous task of heavy work and can complete the work of the mechanical device. Robot due to its many irreplaceable advantages are widely used in various industries. In this paper, we design a mechanical system for a robot with two degrees of freedom, a coordinate system of coordinates, and for teaching and experimentation. Through the analysis of the literature on the manipulator, according to the understanding of the design requirements of the design of the manipulator required to analyze the design of the idea of the design of the overall structure of the robot and the composition of the various components of the design and selection, and finally complete the robot assembly and Part drawing CAD drawing. The design of the robot mainly by the hand, telescopic arm and lift arm composition. A gripper and a hydraulic cylinder composed of the implementation of the hand to grasp the object, telescopic arm and lift arm is also driven by two hydraulic cylinders to complete the robot's telescopic and lifting function. In this paper, through the mechanical structure of the manipulator and the design of the hydraulic drive part, theoretically, the design of the two-degree-of-freedom translational rectangular coordinate manipulator mechanical system is realized.
Key words: manipulator mechanical system hydraulic
目 录
摘 要 I
Abstract II
目录 III
第一章 绪论 1
1.1机械手的概述 1
1.2课题研究的意义 1
1.3机械手的国内外研究进展与发展趋势 2
1.3.1机械手的产生与发展 2
1.3.2机械手在我国的发展 2
1.3.3机械手的发展趋势 3
第二章 设计任务 4
2.1设计要求 5
2.2本文主要研究内容 5
2.3 软件介绍 5
第三章 机械手机械系统的总体设计 6
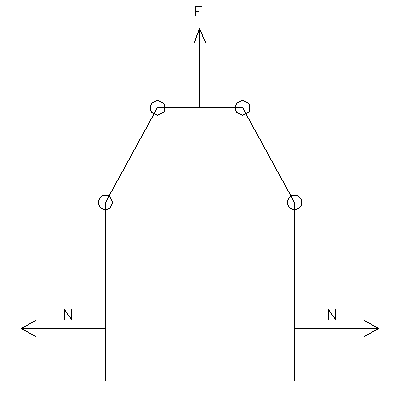
3.1手部设计 8
3.1.1手部结构设计 8
3.1.2手部液压缸选型及校核 9
3.1.3手部支架设计 11
3.2伸缩臂设计 12
3.2.1伸缩臂的液压缸选型及校核 12
3.2.2伸缩臂的支架设计 13
3.3升降臂的设计 14
3.3.1升降臂的液压缸选型及校核 14
3.3.2底座的设计 15
3.4机械手总体机械结构 16
3.4经济核算 17
第四章 总结 18
参考文献 20
致谢 22
第一章 绪论
1.1机械手的概述
机械手做为一种自动控制装置,能够模拟人的手和手臂的做相似的动作。它是一种在固定程序中执行、抓取、移动或操作的工具。近代,它作为自动化里的一类新科技获得了迅速成长,并且已经成为了各行各业中必不可少的一部分,这类技术随着它的快速发展,它拥有了一个新的名字:机械手工程,作为一门新学科。机械手触及广泛,它是一门综合技术包含了多种学科。机械手是可以通过输入不同的任务程序实现各种不同的工作任务的一类机械装置,适用范围大。它形式多样,拥有多个自由度,实现灵活的操作,可以在不同环境中按照编入程序执行工作任务。机械手在刚诞生的时候结构形式单一并且专用性很强。伴着相关技术的迅速进步,可以独自完成编入程序要求执行工作的开始出现。它的适用性广泛并且可以通过编写程序进行控制,我们把这些机械装置简称为通用机械手。
1.2课题研究的意义
在近些年来,各个行业中机械手得到了普遍的应用,并且获得了人们的认可以及越来越多的重视和关注,这些事源自机械手所拥有的其他装置无法比拟的优势,主要概括如下:
1、机械手能够替代人完成很多工作操作,这大大降低了人的劳动强度,大量劳动力也由机械手的出现发展获得了解放,它促进了生产的工业化、节奏化的发展。
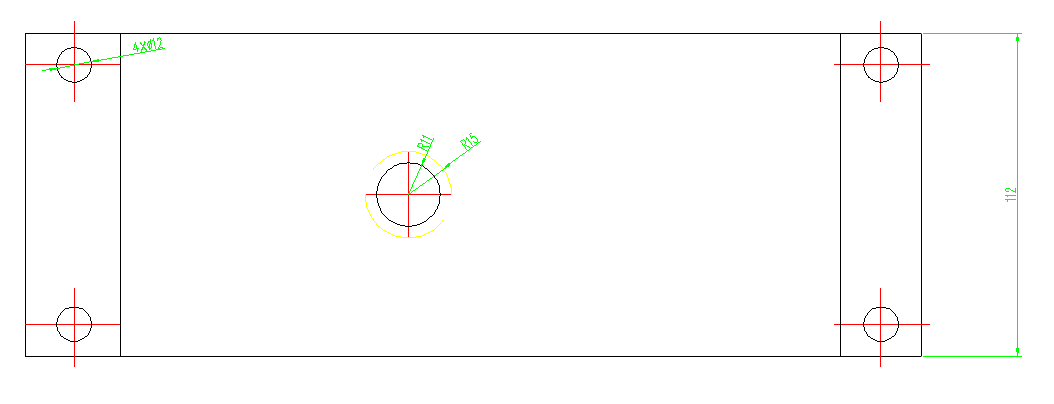
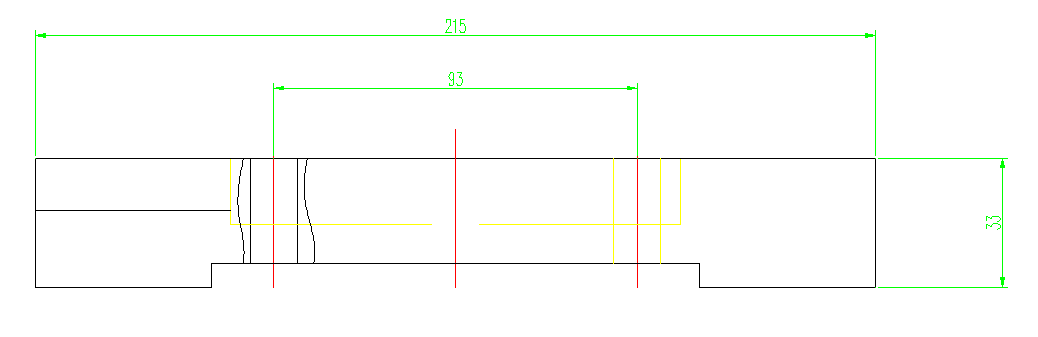
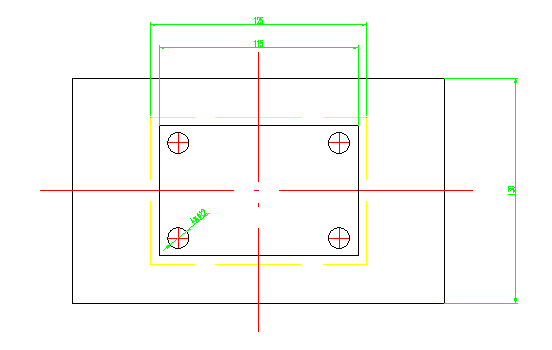
相关图片展示: