工字轮搬运复合机器人毕业论文
2020-04-13 11:06:25
摘 要
本研究的目的是开发一种满足钢帘线生产需求的工字轮搬运复合机器人。可以实现将工字轮从帘线(DTS)收线车台自动抓取到AGV车上的纸箱中,在AGV车上进行在线码垛,达到一定层数后,自动运输并输送到包装区的辊筒输送机上。本装置的研究内容主要包括系统总体设计、机械结构设计和控制系统设计。首先进行系统总体的框架设计以及目标功能的确定,然后在此基础上进行结构的设计,确定研究重点,最后进行控制系统的设计。工字轮搬运复合机器人主要由机械抓手、视觉系统和AGV小车三部分组成。该设备采用机器抓手和机器人视觉系统完成工字轮的自动抓取和在线码垛,通过AGV小车和输送托辊完成工字轮的运输和输送。本论文将以机构设计为核心,配合视觉系统和plc控制系统对该设备进行设计分析。
关键字:工业机器人;搬运;工字轮
Abstract
The purpose of this study is to develop a type of wheel transport complex robot which meets the requirements of steel cord production. It can automatically grab the wheel from cord (DTS) train into the carton of AGV car and on-line stacking in the AGV car. after reaching a certain layer, It automatically transport to roll conveyor in the packaging area. The research of this device mainly includes system design, mechanical structure design and control system design. Firstly, the overall framework design of the system and the determination of the target function are carried out, then the design of the structure is carried out on this basis, the research focus is determined, and the design of the control system is finally carried out. It is mainly composed of mechanical gripper, visual system and AGV trolley. This equipment uses the robot to grab and the robot vision system to complete the automatic grab and the online palletizing, through AGV trolley and the conveyor roller to complete the carriage and transport of the wheel. This paper will design and analyze the equipment based on the mechanism design and the visual system and PLC control system.
Key Words:Industrial robots; Transport; H Wheel
目录
第1章 绪论 1
1.1 国内外研究现状分析 1
1.1.1 工业机器人发展现状 1
1.1.2 工字轮搬运设备发展现状 1
1.1.3 技术支撑 2
1.2 目的及意义 2
1.3 设计思路 2
第2章 总体设计 4
2.1 研究内容概述 4
2.2 技术要求 5
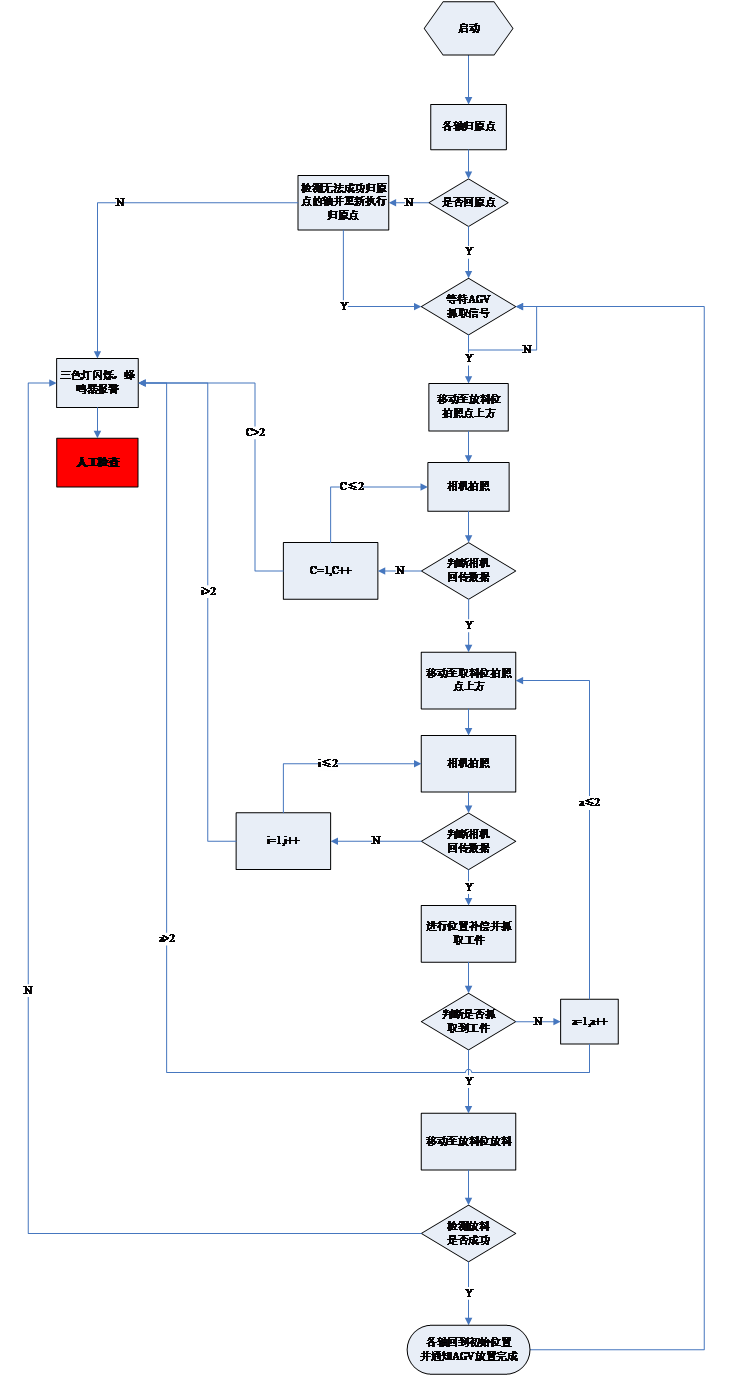
2.3 设备工作流程 5
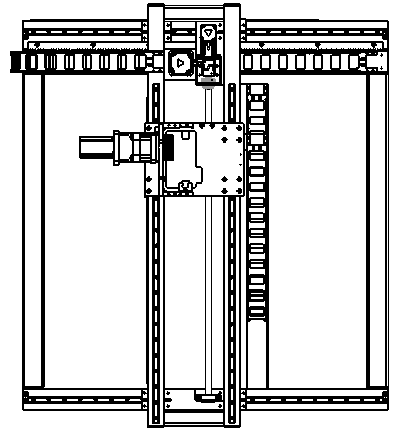
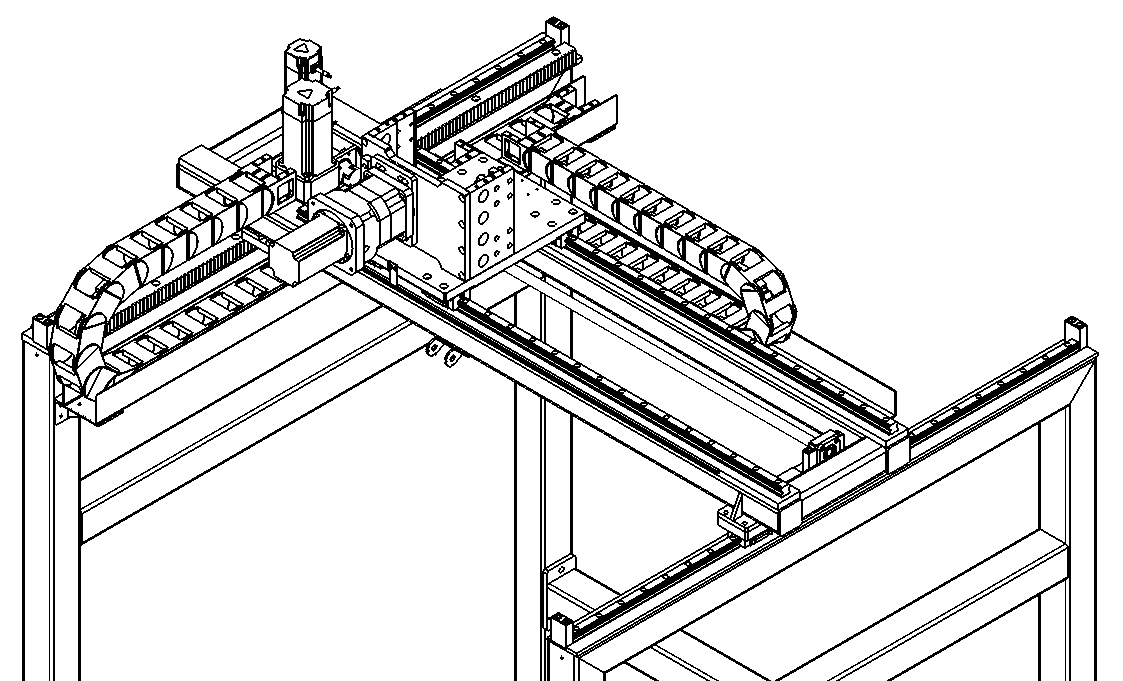
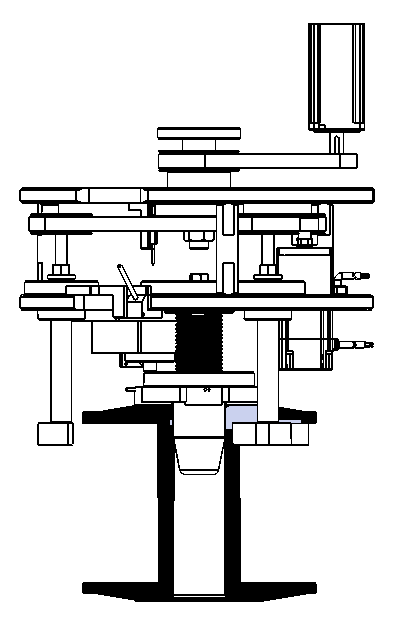
2.4 四轴机械抓手设计方案 5
2.4.1 整体设计方案 5
2.4.2 X轴设计方案 6
2.4.3 Y1轴方案设计 7
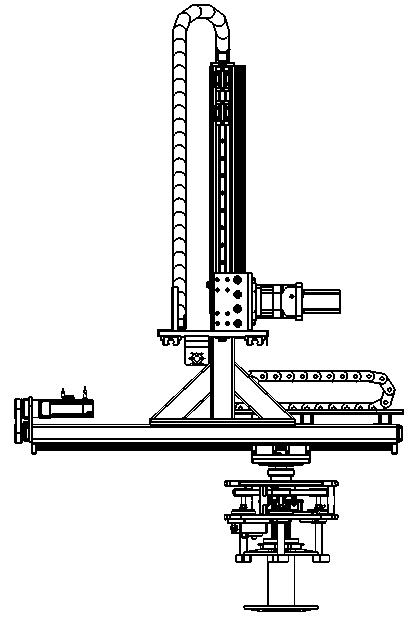
2.4.4 Y2和Z轴设计方案 7
2.4.5 装夹装置设计方案 8
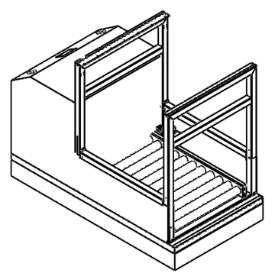
2.5 传送部分设计 9
2.6 控制系统设计 10
第3章 设计选型 11
3.1 Y1轴设计计算 11
3.1.1 丝杠部分设计计算 11
3.1.2 轴承选型 15
3.1.3 电机选型 15
3.1.4 减速器选型 17
3.1.5 齿形带选型 17
3.2 X轴选型 25
3.2.1 联轴器选型 25
3.3 Z轴选型 27
3.3.1 齿轮齿条选型 27
3.3.2 电机选型 29
3.3.3 减速器选型 30
3.4 Y1轴选型 30
3.4.1 齿轮齿条 30
3.4.2 电机选型 30
3.4.3 减速器选型 30
第4章 仿真分析 31
4.1 主支架方针分析 31
4.2 X轴滑台架仿真分析 32
4.3 Z轴与Y2强度校核 33
第5章 经济性和环保性分析 34
5.1 经济性分析 34
5.2 环保性分析 34
第6章 全文总结与展望 35
6.1 工作总结 35
6.2 研究展望 35
参考文献 36
致谢 37
第1章 绪论
1.1 国内外研究现状分析
1.1.1 工业机器人发展现状
目前工业机器人有以下几个发展趋势:①机械结构向模块化、可重构化发展;②控制系统向基于PC机的开放型控制器方向发展;③多传感器融合配置技术;④数字伺服驱动技术;⑤视觉技术;⑥网络化技术等[1]。
从国际间比较来看,西欧与美国的地位大致相同,日本在应用方面处于相对领先地位[2]。目前不少国家都有自己的工业机器人标准和系列化产品,具有代表性的公司包括瑞典ABB、德国KUKA、日本FANUC以及意大利COMAU等[3]。
在国内,工业机器人从80年代“七五”科技攻关开始起步[4]。目前已开发出弧焊、点焊、搬运等机器人,但是从事机器人研发和应用工程的单位相对较少,工业机器人的拥有量远远不能满足需求,大量依靠国外引进[5]。
1.1.2 工字轮搬运设备发展现状
工字轮是用来缠绕金属丝或钢丝绳使用的一种工具。据所缠绕的丝绳材料和规格的不同,工字轮的规格和材料也不同[6]。其中主要包括钢板工字轮、木制工字轮和塑料工字轮三种。钢板工字轮具有体积大、质量沉的特点,在生产车间中其上下料和搬运很难由人力完成[7]。目前市场上传统的工字轮搬运设备主要有:
工字轮上下小车:工字轮上下小车是扬州百盛新能源科技有限公司自行开发的一种针对于工字轮搬运的设备。它可以实现工字轮的起升和变幅。但是其水平移动能力差,很难完成水平运输的工作。同时,其通过钢丝绳缠绕系统完成起升和变幅动作,很难完成工字轮的精准定位。
工字轮吊装工具:工字轮吊装工具是针对工字轮上下移动而设计的一种起吊装置,它主要可以针对工字轮的不同摆放位置自适应地完成其起升运动[8]。
工字轮推出机构:工字轮推出机构是针对钢帘线生产线的一种工字轮推出装置,它可以完成工字轮的水平运输[9]。
工字轮翻转装置:工字轮翻转装置主要完成将平放的工字轮竖起的工作。其结构简单,使用灵活,但不适用于钢帘线上大规模工字轮的生产[10]。
在追求经济与高效的今天,传统的搬运设备早已很难满足大型钢帘线对于工字轮自动上下料及搬运的需求。据调研,工字轮生产厂家迫切希望开发出一套集工字轮自动上下料、在线码垛、智能运输于一体的全自动设备[11]。在我国搬运机器人技术日益成熟的今天,满足钢帘线需要的全自动搬运设备孕育而生。
1.1.3 技术支撑
在串联搬运机器人方面,我国有较好的基础性研究和工业化应用。
哈尔滨工业大学早在20世纪80年代就开始了机器人方面的研究[12]。成功地研制了码垛机器人,取得了良好的经济效益和社会效益。并就其中的腰转部分、大臂、小臂、平衡机构的机械设计进行了深入探讨,提出了研制该类型机器人需要考虑的关键点,对工业机器人研制开发具有一定的指导意义。上海交通大学对含有平行连杆的机器人动力学问题做了研究,提出了动力学建模方法。中科院自动化所对关于工业机器人实时控制研究给出了一种逆运动学求解方法。总之,经过国内科研机构的多年基础性研究,在机器人本体设计、理论建模、运动仿真和控制方面都取得了丰硕的成果,形成了一整套相对成熟的理论体系。
AGV从发明至今已经有50年的历史,经过多年的发展,其技术已相当成熟。目前AGV小车已经遍布多个行业,如仓储业、制造业、邮局、图书馆、港口码头、机场等。
1.2 目的及意义
本论文旨在开发一种满足钢帘线生产需求的工字轮搬运复合机器人。可以实现将工字轮从帘线(DTS)收线车台自动抓取到AGV车上的纸箱中,在AGV车上进行在线码垛,达到一定层数后,自动运输并输送到包装区的辊筒输送机上[13]。它可以大大提高钢帘线的生产效率和经济效益,增强我国工字轮生产厂家的核心竞争力,促进工字轮下游企业的发展,从而有效的推动我国制造业的发展。同时,其有利于促进我国专用搬运设备的发展,为其他专用设备的开发提供经验指导。
1.3 设计思路
传统的工字轮搬运设备的效率和自动化程度已经无法满足大型钢帘场的需要。针对这一现状,本项目组在查阅相关文献和进行实际调研的基础之上提出了一种集自动上下料、在线码垛、智能运输于一体的全自动设计方案[14]。本装置拟用机器抓手和机器人视觉系统完成工字轮的自动抓取和在线码垛,通过AGV小车和输送托辊完成工字轮的运输和输送[15]。具有高效、安全、经济等优势。在此基础上利用机械原理、机械设计等学科知识进行机械原理和结构设计,并用SolidWorks和ANSYS等软件对结构进行建模与仿真优化,之后对各部分结构进行校核计算,以保证装置的合理性与可行性,并进行了加工工艺分析,保证加工精度和装配要求[16]。此外,通过控制系统设计,实现机电一体化,提高装置的自动化水平。
分析现有工字轮搬运设备
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: