自行式集装箱搬运装卸机器人液压系统设计毕业论文
2020-04-12 16:20:20
摘 要
集装箱装卸搬运机器人工作地点主要在小型港口、码头、铁路、中转站以及各类堆场等场地
最近十年,我国小型港口建设发展很快,在港口码头和运输船之间货物运输,集装箱搬运需求相对较多,但是对于集装箱搬运运输装卸一直需要装卸机械和运输行走用的集卡配合作业;所以对于集装箱搬运装卸运输,堆放作业日益频繁,对作业量也有很高的需求。
本设计针对小型港口、码头堆场的工作环境,集装箱搬运装卸的工作要求,设计一种门吊、集卡、正面吊一体化的四轮独立转向集装箱自动搬运装卸机器人的液压系统。该机器人的各种主要动作都采用液压传动,本设计具有装卸集装箱与堆垛和短距离搬运集装箱的功能。
根据集装箱自动搬运装卸机器人的各个动作的运作要求,设计中的液压系统大体分为下车行走子系统、独立转向子系统、上车的回转、机械臂搬运装系统。
此次设计的内容主要包括系统原理设计、工作参数的计算、元件的选型、以及液压站的装配等部分。
关键词:装卸搬运机器人;运动学分析;液压驱动;设计
Abstract
The working place of container handling robots is mainly in small ports, docks, railways, transfer stations, and various yards.
In the recent ten years, the development of small-scale ports in China has developed rapidly. In terms of cargo transportation between port terminals and transport ships, there is a relatively large demand for container handling. However, container handling and transport operations have always required loading and unloading machinery and transportation and use of trucks for cooperation; Therefore, for container handling, loading and unloading, stacking operations are increasingly frequent, and there is also a high demand for the amount of work.
This design aims at the working environment of small ports and dock yards, and the working requirements for container handling, and designs a hydraulic system for remote handling and automatic handling of loading and unloading robots integrated with door hangers, stacking cards, and frontal cranes. The main movements of the robot are all hydraulically driven. This design has the functions of loading and unloading containers and stacking and transporting containers in short distances.
According to the operational requirements of each operation of the container automatic handling robot, the designed hydraulic system is roughly divided into an off-road subsystem, a steering subsystem, an on-vehicle pivot, and a robot handling system.
The contents of this design mainly include the design of system principle, the calculation of operating parameters, the selection of components, and the assembly of hydraulic stations.
KEYWORDS: kinematic analysis; Handling robot; hydraulic drive; design
第1章 绪论
1.1课题背景
集装箱港口装卸搬运机械是一种拥有间歇性循环运作特点的机械。集装箱起重搬运装置用来实现货物的装卸,转载等作业,工作要求是用来使集装箱货物实现竖直和水平运作。为了实现物流作业的自动化,一定程度上减少工人的工作强度,如今中国现代化企业里面起重机搬运装卸器械中提高货物的搬运装卸效率和条件是必不可少的因素。
集装箱港口机械通常分为:正面吊、集装箱搬运机械、门座式起重机[1]。其中,集装箱搬运堆垛机械是最重要的组成部分。目前大型港口的集装箱搬运堆垛机械不再是通过钢丝绳来实现集装箱的起吊,而是完全依靠机械臂的运动来实现集装箱的搬运操作,例如最多的就是正面吊。
自行式集装箱搬运装卸机器人是工作在码头、港口、运输船和堆垛场运作的机械,负责对集装箱的起吊、运输、装卸一体化作业。
物料搬运在全部的国民经济中具备不可或缺的地位,提高集装箱搬运机械的生产效率,在安全指标下,顺畅的完成作业运行并且能够降低物料搬运成本,提高作业搬运效率。
据国外资料统计,在美国每千元工业产品成本中,物料、货物搬运费用非常高,在数值上接近250美元左右,以一个美国某厂为例子,其生产过程中物料搬运、货物装卸搬运等所用的工时占整个运作周期的80%左右。国内而言,我国东风汽车厂,汽车零件在运输搬运存储过程花了整个工时的90%,而剩下5%用来加工生产[2]。
由以上数据可以看到,作为物料搬运之一的集装箱装卸搬运设备而言,需求量是非常大的,起重机行业的集装箱搬运装卸这一块有着非常明朗的前景。
改革开放以来,中国经济的超快发展和对国外视野的扩张,中国集装箱运输、物料搬运装卸的增长势头非常迅猛,未来发展状况非常乐观。从国际班轮航线来看,中国集装箱运输已经覆盖欧中、澳大利亚、南非、地中海、波斯湾、美东等地区。所以在码头港口集装箱堆放作业日益频繁,带来了对自行式集装箱搬运机器人巨大的需求。
1.2技术现状
集装箱搬运机械的作业通常带有重复循环的性质。一套系列的工作流程包含了吊具起吊,搬运机械臂的回转,搬运机器人的平东运输搬运,到达目的地后机械臂运作进行货物卸载,然后空载驾驶返回起吊搬运作业地点,直至下一次取物开始。以上是这个集装箱搬运机械的基本特点。集装箱在搬运机械卸载的时候,集卡运输集装箱到达堆垛目的地,正面吊等吊桥在完成集装箱堆积作业。当集装箱船舶停靠码头后,各个桥吊进行最初运作,同时跨运车、集卡在实现集装箱从岸边到堆场的运输作业,最后集装箱搬运堆垛的作业主要是由龙门吊来完成。
世界各地的集装箱使用规模越来越受到深远的影响得益于标准化和低运输成本,大规模的标准化集装箱搬运装卸设备也给全球带来到了深远影响。运输中的规模一体化和低廉成本也造就了亚洲经济的快速发展。国内外集装箱搬运设备的制造商在国际机械设备市场占很大的比例的份额。例如,:美国马尼托沃克公司生产的起重机,安装有现代化的监控,让驾驶员时刻知晓起重机的运行情况,方便检查设备及时发现问题,排除故障,将安全作业体现得滴水不漏;东北大学机械工程和自动化学院在人类和机器工程学专业领域也有很前沿的研究发展。力图使产品更加人性化,达到最佳的人机系统综合使用效能。
可见,当前集装箱搬运装卸发展方向主要有:提高安全性、可靠性;设计人性化,高效率作业等。
集装箱搬运机器人的主要执行元件是靠液压驱动的,因此,液压系统的系统简化、提高可靠性、自动化和人性化设计是不可或缺的设计理念。同时,降低能耗、提高效率、进行污染控制也是必须重点关注的。
本设计中的自行式集装箱搬运装卸机器人,国内目前还没有单位生产,主要还是依靠进口满足工程需求。面对国外产品高昂的价格,自主研发、设计、制造显得尤为紧迫。
这一次的毕业设计是在机械设计制造专业学完专业课后进行的一次全面综合的课程设计。运用所学过的专业理论知识(机械原理、液压及气压传动、液压系统元件与设计等),通过对一些工程机械中的典型的液压系统的优缺点分析比较,进行选择和改进完善,使自行式集装箱搬运机器人在行走、吊运等方面的工作得到简化,使各个环节之间更加紧凑,最后保证经济性和未来的可持续发展的角度进行了人性化的设计。
1.3设计目标和技术路线
设计目标是设计出在码头、港口能够实现集装箱从运输船、集卡搬运、吊桥堆垛一体化的自行式集装箱搬运机器人。本设计重点是从液压系统设计入手,并对搬运机械臂做简单地运动学分析,以便后期动力学和逆运动学分析对于搬运机械臂各个阀等精确地选型和应力分析仿真计算,设计出具有可实施性的集装箱搬运设备。
本设计的技术路线如图1.1所示:
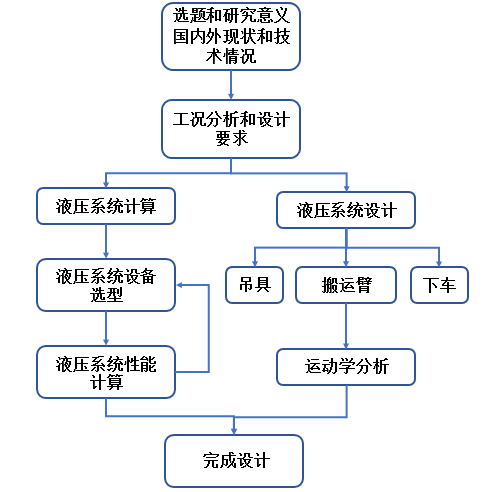
图1.1 技术路线
第2章 集装箱搬运机器人液压统的方案设计
集装箱搬运机器人液压系统的特点如下:
- 具有多执行部件:至少包括俯仰臂、折叠臂、伸缩臂、吊具、行走;
- 动力特性要求高:要求输出功率大、扭矩高、高变速指标;
- 负载变化大:体现在外负载变化很剧烈、冲击也很频繁、启动制动转向需要频繁控制,自身的功率需求改变非常剧烈;
- 执行部件可独立动作:对于每个组件的动作操作顺序没有预定的规律;
- 需要良好的操纵特性:调速特性、独立操纵特性等;
- 特殊功能要求:锁定、制动、同步。
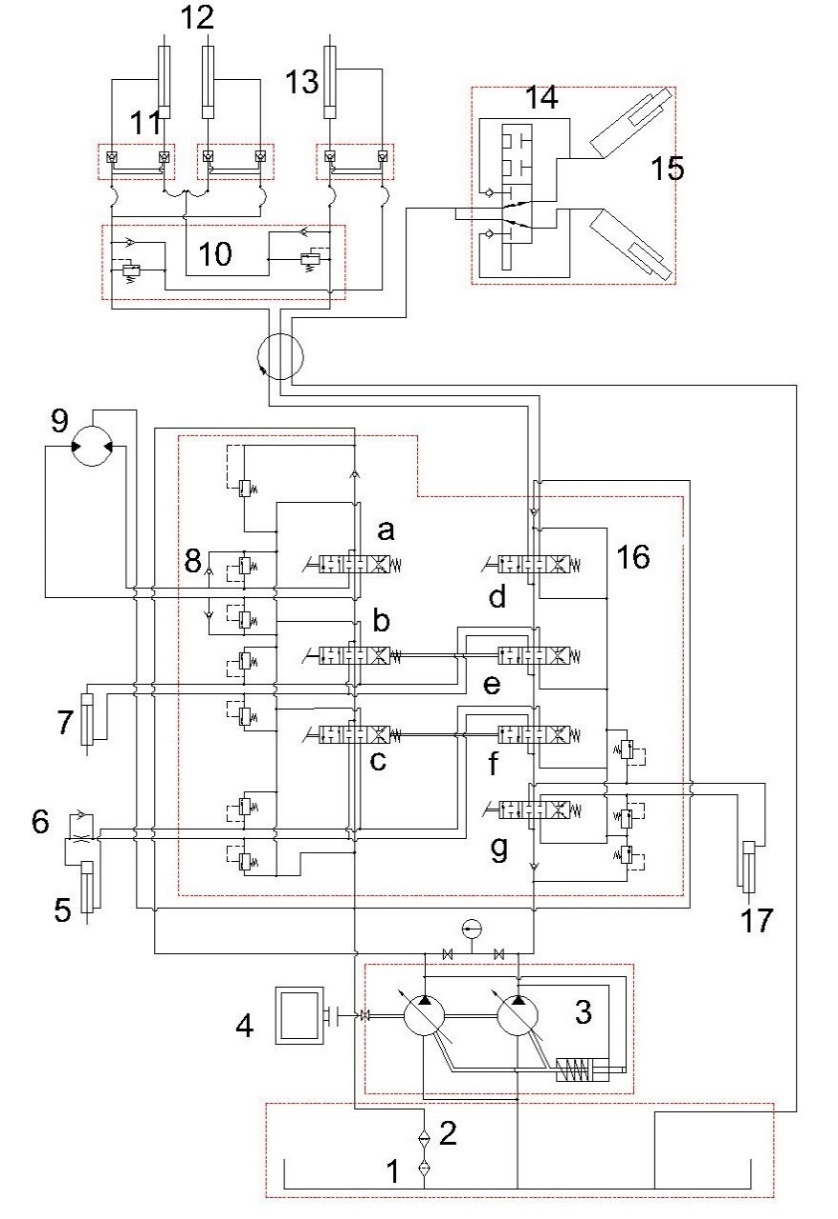
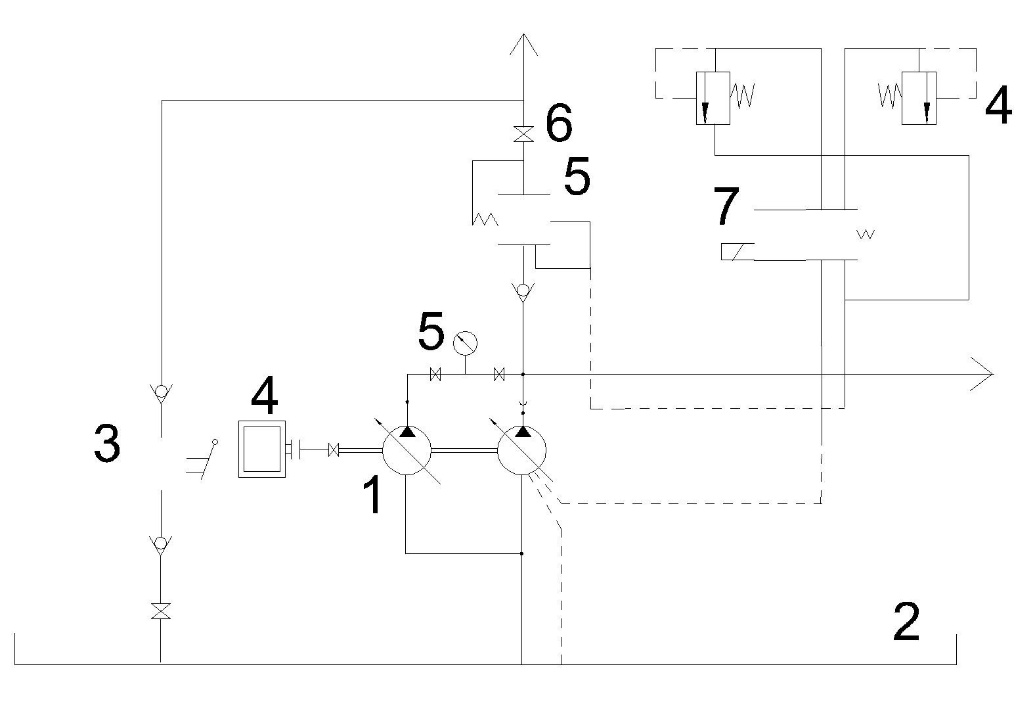
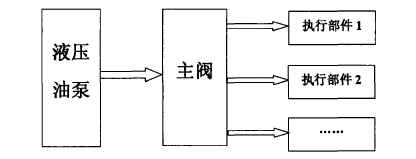 集装箱搬运装卸机器人主液压系统的基本组成如见图2.1(没有考虑液压附件及先导控制部分等):
集装箱搬运装卸机器人主液压系统的基本组成如见图2.1(没有考虑液压附件及先导控制部分等):
图2.1 主系统的基本组成图
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: