基于Creo平台的MQ4035门机平衡梁结构设计毕业论文
2020-04-09 14:13:01
摘 要
本次设计是关于MQ4035门座起重机的结构设计,其中包括这四个机构,分别是:起升机构、运行机构、变幅机构、回转机构,另外还有其他机构共同组成。门座起重机的金属结构主要包括平衡梁、小拉杆、大拉杆、臂架、象鼻梁等,本文主要针对的是平衡梁和小拉杆的结构设计。
在设计过程中,具体介绍了货物水平位移补偿系统的设计和臂架自重平衡系统的设计,得到了平衡梁和小拉杆的主要尺寸数据。然后在Creo软件上建立三维模型,运用ANSYS对所得模型进行静力学分析,最后得到满足要求的平衡梁和小拉杆,并运用Creo将模型的工程图绘制出来。
关键词:MQ4035;平衡梁;小拉杆;CREO
Abstract
This design is about the structural design of the MQ4035 portal crane, which includes these four institutions, namely: lifting mechanism, operating mechanism, luffing mechanism, turning mechanism, and other organizations. The metal structure of portal crane mainly includes balance beam, small tie rod, large tie rod, boom, elephant bridge, etc. This article mainly focuses on the structural design of balance beam and small tie rod.
In the design process, the design of the horizontal displacement compensation system for the cargo and the design of the boom self-balancing system are introduced in detail, and the main dimension data of the balance beam and the small drawbar are obtained. Then the three-dimensional model was built on Creo software. The static model of the obtained model was analyzed by ANSYS. Finally, the balance beam and the small tie rod meeting the requirements were obtained, and the engineering drawing of the model was drawn using Creo.
Key words: MQ4035; Balance beam; small lever ; CREO
目 录
第1章 绪论 1
1.1研究背景 1
1.2课题研究内容 2
第2章 总体设计计算 3
2.1门座起重机概述及技术参数 3
2.2货物水平位移补偿系统 4
2.2.1四连杆组合臂架的原理 4
2.2.2四连杆组合臂架的设计 4
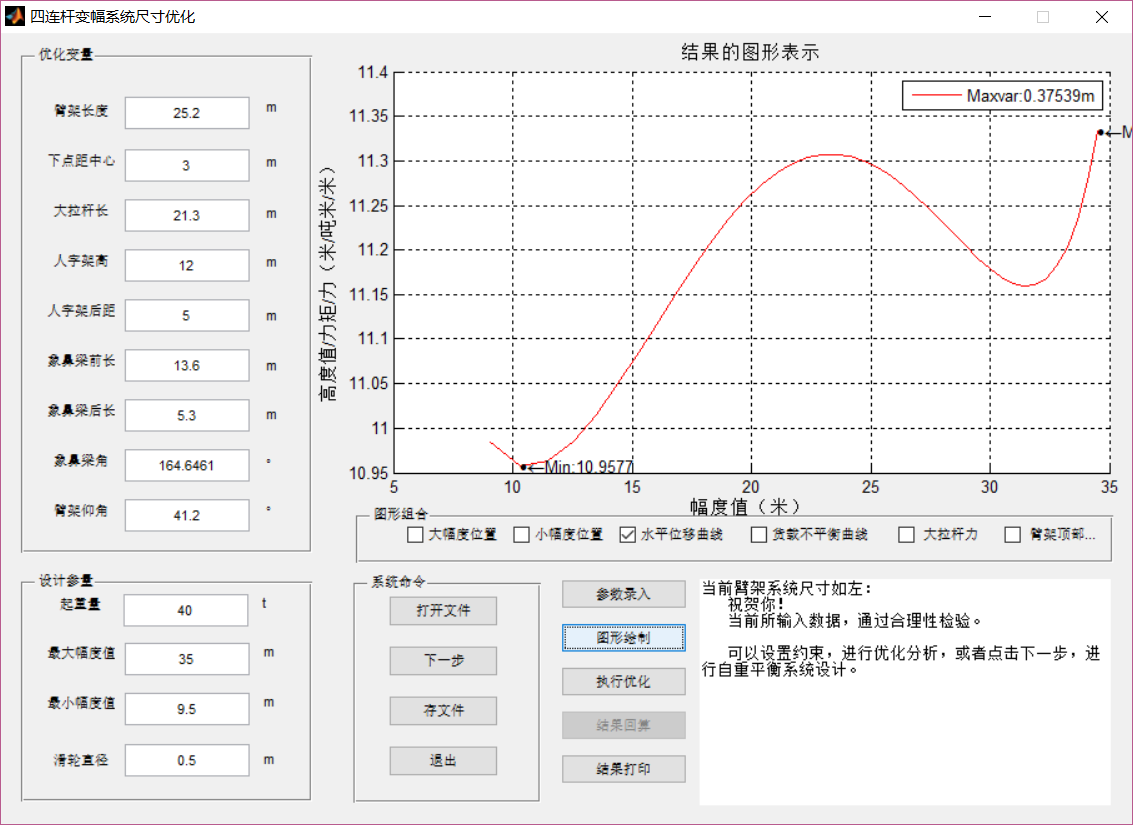
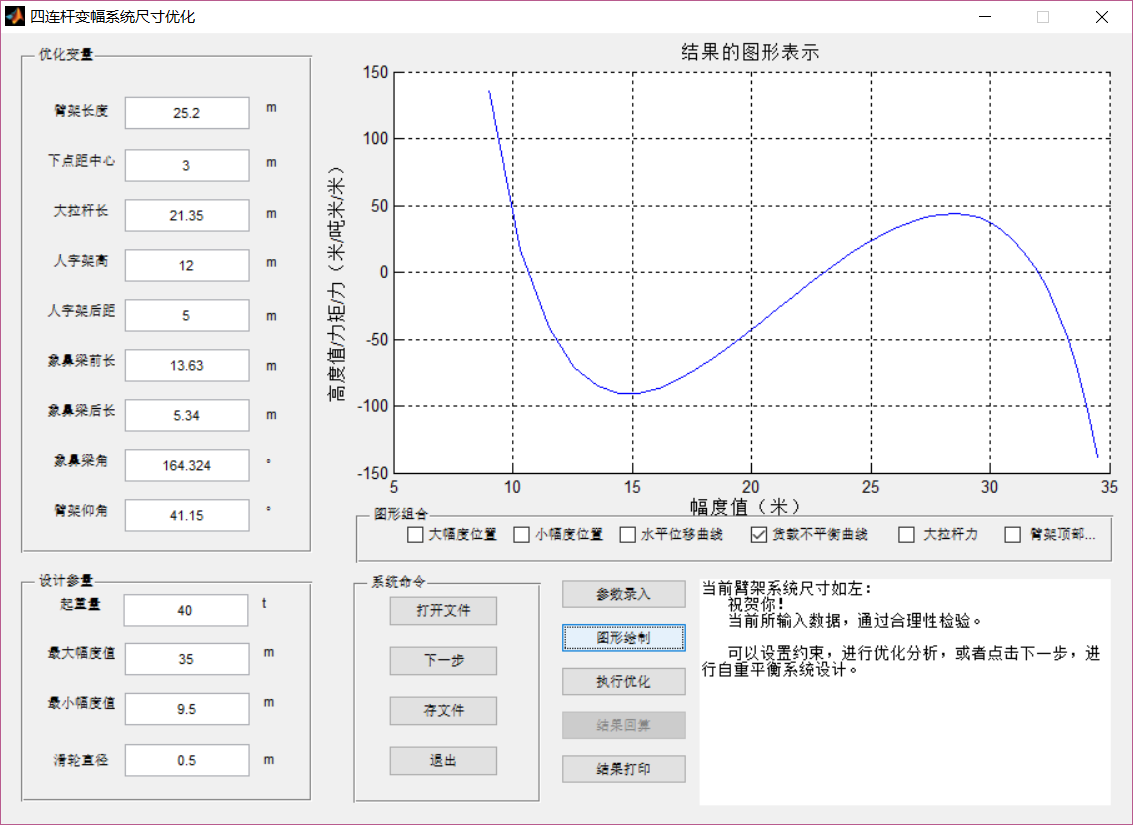
2.2.3组合臂架系统的验算 7
2.3臂架自重平衡 9
第3章 平衡梁和小拉杆的CREO建模 12
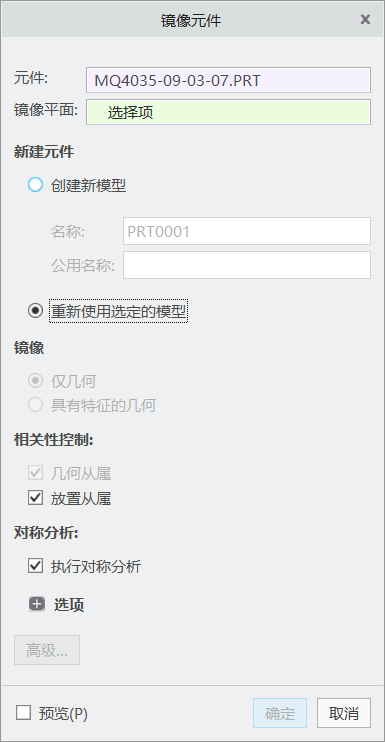
3.1 CREO的介绍 12
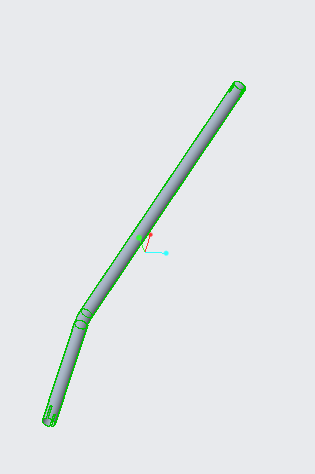
3.2小拉杆的CREO建模 12
3.3平衡梁的CREO建模 15
第4章 平衡梁和小拉杆的ANSYS分析 17
4.1 ANSYS的介绍 17
4.2平衡梁的强度刚度校核 17
4.3小拉杆的强度刚度校核 20
第5章 平衡梁和小拉杆的工程图绘制 25
5.1 CREO工程图绘制 25
5.2平衡梁和小拉杆的图纸导出 26
第6章 环境性与经济性分析 27
6.1环境性分析 27
6.2经济性分析 27
第7章 总结 28
第1章 绪论
1.1研究背景
港口是国际运输体系的一个重要的节点和服务平台,而港口物流将在实现“一带一路”战略目标发挥着举足轻重的作用。 在世界各国,港口物流运输中存在的主要货物形式包括集装箱、件杂货和液体散货、干散货,其中件杂货的物流输送占据了重要的地位,门座式起重机主要就是用来运输件杂货的设备。目前,门座式起重机在国内主要港口中数量最多,使用率最高[1]。门座起重机的整体组成较为复杂,结构之间的装配关系也比较复杂,但它的使用性能良好、适用性强。
现代门座起重机的金属结构多采取箱形梁结构,为了保证门座起重机的设计要求,一般通过高强度钢板焊接形成杆件结构,在各结构和机构之间的受力状态危险部位钢结构通过铰接传递力,比如象鼻梁、臂架、平衡梁、上转柱、转盘、圆筒、门架、和支腿、平衡梁台车等[2]。在起重机的金属结构上,最容易发生的破坏形式就是疲劳破坏。
在早期的门座式起重机设计制造过程中,相关人员设计出整机模型后制造相应的样机来进行对起重机的实际运行情况进行模拟,随后再根据模拟的情况对设计做出相应修改,这样会大大拉长设计周期,降低设计的准确性。本次毕业设计在设计时引入CREO软件建立门座起重机的三维模型,并直接导入到workbench中进行强度刚度校核,并可以实时反馈结果,进行模型的更改,让设计人员能够更加直观快捷的分析门座起重机的各项性能。
目前对于平衡梁、小拉杆的结构设计的研究多采用有限元分析、三维建模技术。在对于门座起重机平衡梁和小拉杆的金属结构分析中,简单的考虑三个幅度位置(即最大幅度、最小幅度、中间幅度),并没有考虑在整个变幅过程中平衡梁的变速运动,姜明峰,王志虎,顾星在对于平衡梁的ANSYS分析中,不光考虑了静力学分析,同时引用了瞬态动力学分析,对平衡梁进行有限元结构计算,并提出了合理的结构改进建议[3]。
曹娜在门座式起重机臂架及自重平衡系统的优化设计研究中以40~43m门座式起重机为模型目标,对起重机的臂架系统进行设计和分析,并以其结构尺寸为根据设立门座式起重机臂架系统的优化数学模型。利用Matlab对臂架系统的结构尺寸进行调整,利用UG建立调整后的臂架系统的模型,利用ANSYS软件进行力学分析,以验证优化的结果[4]。
在国外,一些起重机厂家生产的产品型号比较完善,技术先进,不但在吨位上更大,并且结构设计更加优化、安全性能更加完善、机械稳定性高,在大吨位产品上安装有全球定位系统,进行实时监测,具备普遍的代表性[5]。他们对于起重机的研究主要集中在与计算机技术相结合的货物防摇,起重机整机抗震等方面而非传统的起重机结构设计。
1.2课题研究内容
本次选题的内容为基于Creo平台的MQ4035门机平衡梁结构设计,以MQ4035型门式起重机为研究对象,采用刚性四连杆臂架自重平衡系统的设计,对门座起重机中的变幅系统进行结构设计及动力分析。知晓门座式起重机在港口物流中的作用,清楚臂架系统在该机型设计中的地位。熟悉四连杆臂架自重平衡系统设计的原理和过程,对平衡梁结构进行设计和评价,构建平衡梁结构和小拉杆结构的三维设计计算模型,在workbench中完成上述两构件的强度刚度校核,构造小拉杆和平衡梁结构的在Creo中的工程图模板。
第2章 总体设计计算
2.1门座起重机概述及技术参数
门座式起重机具备短暂,重复、周期性循环的工作特点,主要由工作机构、金属结构、动力装置和控制系统等三个基本部分构成。工作机构主要是用来保证起重机各种操作,从而能够实现不同的运动,它的作用是实现被吊运货物在空间内的移动,从而满足货物的装卸、转载、搬运、安装等作业要求。门座起重机具有四大工作机构,分别为起升机构、运行机构、变幅机构及回转机构。起升机构实现货物的吊起,运行机构实现起重机的运动,变幅机构实现臂架的伸缩,回转机构实现转台以上部分的回转[6]。其中起升机构是起重机工作的重点,其他的所有机构配合起升机构完成作业。
金属结构是起重机械的骨架,它决定了起重机械的外形,构建了起重机械的作业空间,臂架型起重机的金属结构包括臂架、人字架、转台、门架等各个部分。
动力装置是起重机械的动力核心,它在很大水平上保证了门座起重机的性能和特点。
此次所设计的MQ4035门座起重机主要技术参数见表2.1
表2.1 技术参数表
项目名称 | 技术参数 |
起重量 | 40t |
工作幅度 | 最大幅度:35m 最小幅度:9.5m |
起升高度 | 轨上:30m |
轨下:18m | |
机构工作速度 | 起升机构:30m/min |
变幅机构:45m/min | |
回转机构:1.5r/min | |
运行机构:26m/min | |
机构工作级别 | 整机:A8 |
起升机构:M8 | |
变幅机构:M7 | |
回转机构:M7 | |
运行机构:M4 | |
轨距 | 10.5m |
工作状态最大风速 | 20m/s |
非工作状态最大风速 | 55m/s |
许用轮压 | 250KN |
轨道型号 | P50 |
电源 | 380V/50Hz |
2.2货物水平位移补偿系统
在门座式起重机中,一般需要在起重机工作的过程中进行变幅运动,当采用简单的摆动臂架方式变幅时,由臂架自重和起升载荷产生的势能变化所导致的不必要的变幅阻力在全部变幅阻力中占据着很大的比例,因此要采用合适的措施来减小势能变化的影响,目前常用的水平位移补偿方法有绳索补偿法和组合臂架补偿法。
常用的补偿方案有滑轮组补偿和刚性拉杆组合臂架补偿。滑轮组补偿方案是在钢丝绳卷绕系统中额外增加了一个补偿用滑轮组以此抵消臂架摆动时吊钩位置的升降;刚性拉杆组合臂架由臂架、象鼻梁、大拉杆组成并与人字架构成平面四连杆机构,臂架摆动时象鼻梁端点运动轨迹为双叶曲线,在一定范围内为近似水平线。滑轮组补偿法结构简单,臂架自重小。但相较于刚性拉杆组合臂架法其起升绳长度较长且磨损严重,小幅度时物品悬挂长度长,摆动角度大,故常采用刚性拉杆组合臂架补偿方案。本机采用的即为刚性拉杆组合臂架方案。
2.2.1四连杆组合臂架的原理
四连杆组合臂架系统由象鼻梁、臂架、刚性拉杆、机架等组成,在设计时通过合理的确定臂架下铰点位置和大拉杆下铰点位置可以使象鼻梁端点接近水平线运动。此时,将起升机构的钢丝绳沿着臂架系统的轴线布置即可保证起吊的货物沿着水平性运动。
2.2.2四连杆组合臂架的设计
初定门机组合臂架的尺寸
通过参考港口起重机械中的作图法确定臂架系统构件的主要几何尺寸:其中包括臂架长度L,象鼻梁前臂长度l1和后臂长度l2,、大拉杆长度l3;确定臂架下铰点O和大拉杆铰点O1的位置,使货物在变幅过程中沿近似水平轨迹移动,货物的未平衡力矩尽可能小。[7]
设计方法:
a)初定臂架下铰点O的位置。
根据主要性能参数表中的的幅度要求 m和
m和 m、轨上起升高度H=30m等条件,依据手册和经验,O点距回转中心水平距离f通常取0.5~3m,在设计中取f=3m。然后计算出O点到象鼻梁端部滑轮中心的高度H0:
m、轨上起升高度H=30m等条件,依据手册和经验,O点距回转中心水平距离f通常取0.5~3m,在设计中取f=3m。然后计算出O点到象鼻梁端部滑轮中心的高度H0:
 (2.1)
(2.1)
式中 H——起重机轨面以上起升高度;
H1——臂架下铰点距轨面的垂直高度;
H2——取物装置所需空间高度。
求解得到H0=11.2m。
b)求解臂架长度L和象鼻梁前段长度:
首先确定计算幅度,起升滑轮组倍率m q=1
 (2.2)
(2.2)
 (2.3)
(2.3)
在起重机运动的过程中,臂架系统由最大幅度位置运动到最小幅度位置时象鼻梁端点处于同一条水平线上。初步确定Rmin时的 和
和 。要满足Rmin时货物偏摆而钢丝绳不脱出滑轮槽为宜,通常取
。要满足Rmin时货物偏摆而钢丝绳不脱出滑轮槽为宜,通常取 ,此处取
,此处取 ;一般取为
;一般取为 ,此处取
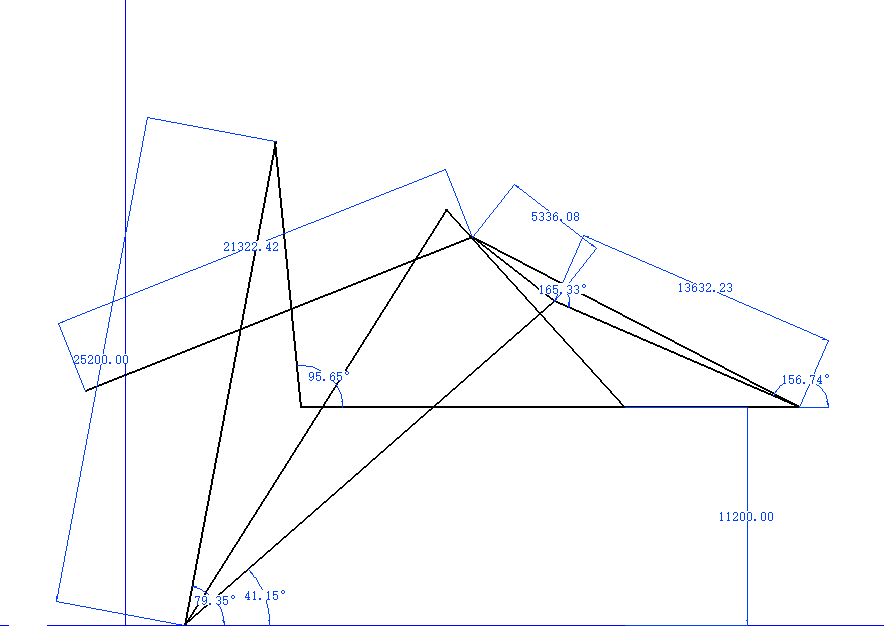
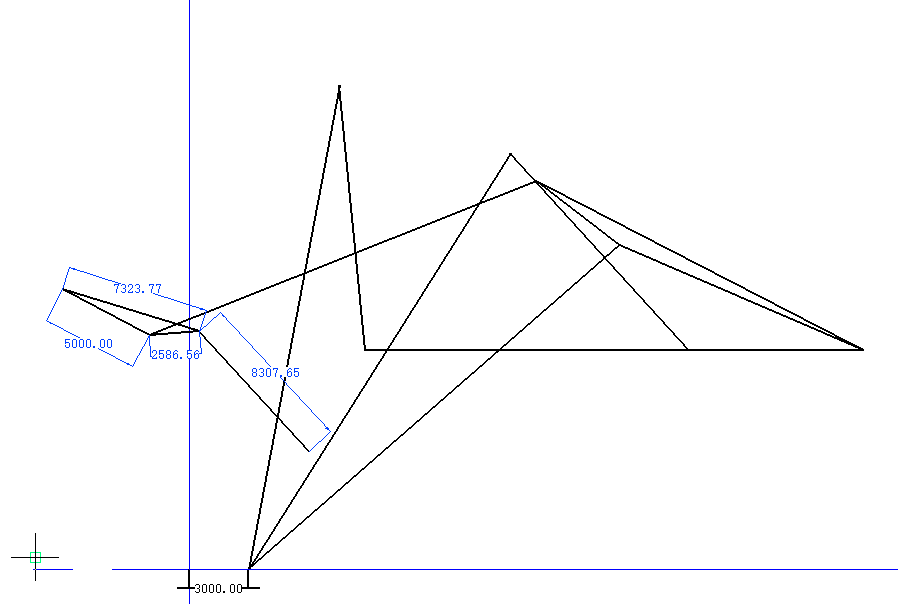
,此处取 。沿和角作象鼻梁和臂架轴线交于B2点,然后以OB2为半径作出臂架摆动弧线,并以A2B2为半径, A1为圆心作圆弧BB2交弧线于B1点,作出Rmax时臂架位置OB1和象鼻梁前段位置A1B1。
。沿和角作象鼻梁和臂架轴线交于B2点,然后以OB2为半径作出臂架摆动弧线,并以A2B2为半径, A1为圆心作圆弧BB2交弧线于B1点,作出Rmax时臂架位置OB1和象鼻梁前段位置A1B1。
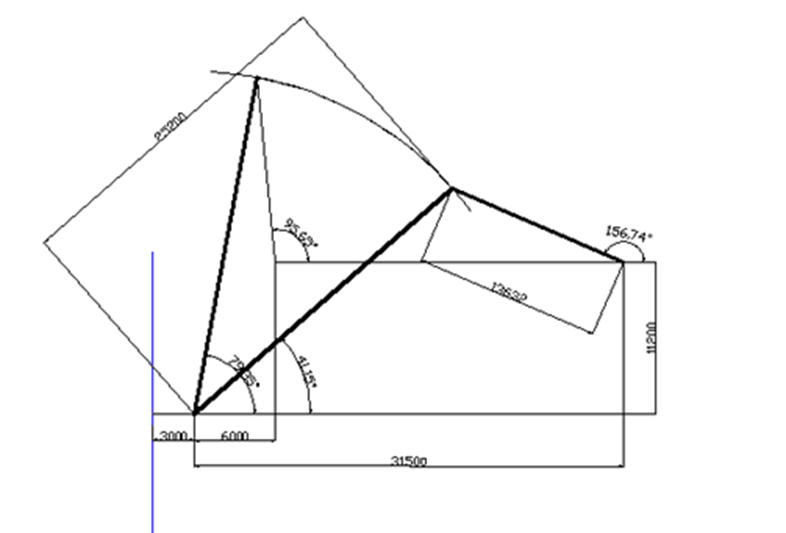
图2.1 象鼻梁前段长度和臂架长度简图
做出图形后进行数据测量,通过测量可知,臂架长度L=25200mm,l1=13632mm。 ,满足
,满足 要求;
要求;  ,满足
,满足 要求。
要求。
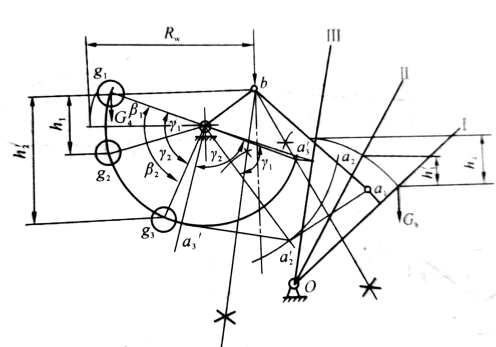
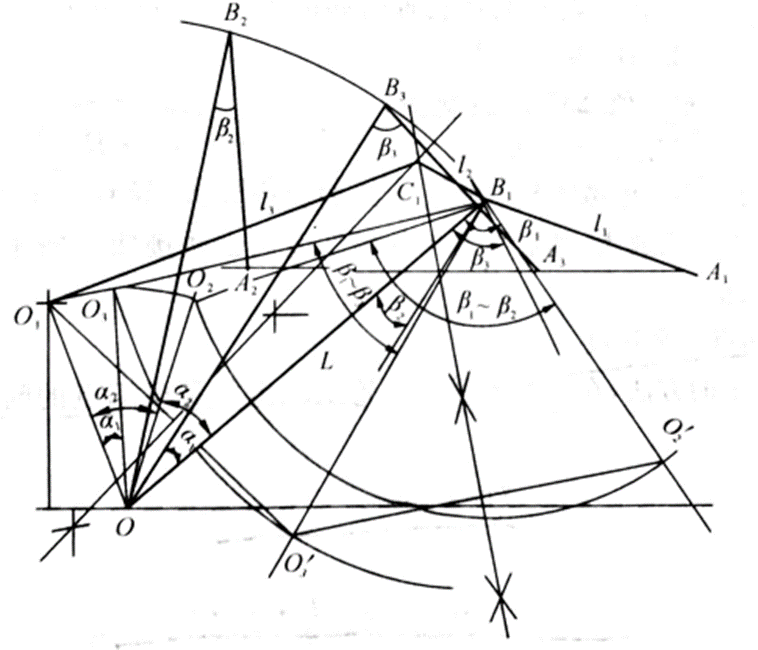
c)求解象鼻梁后段长l2和大拉杆长度l3。
为了直接反映总体布置要求,先确定O1相对于O的位置,经验取值:  ,
, 。对于港口用门座起重机,由于尾部最大半径受限制,通常A取最小值,取
。对于港口用门座起重机,由于尾部最大半径受限制,通常A取最小值,取 mm,B取大值,取
mm,B取大值,取 mm。确定O1后,以A1、A2、A3都在同一水平线作三个位置的象鼻梁前段得B1、B2、B3。假设象鼻梁和大拉杆铰点O1之间的相对位置保持不变,将做最小和中间两幅度位置的象鼻梁前段反转与最大幅度的象鼻梁重合,这时点O2和O3也相应转动
mm。确定O1后,以A1、A2、A3都在同一水平线作三个位置的象鼻梁前段得B1、B2、B3。假设象鼻梁和大拉杆铰点O1之间的相对位置保持不变,将做最小和中间两幅度位置的象鼻梁前段反转与最大幅度的象鼻梁重合,这时点O2和O3也相应转动 到
到 。作
。作 和
和 的垂直平分线,其交点C1就是大拉杆与象鼻梁在最大幅度时的连接铰点。连接B1 C1和O1 C1便获得象鼻梁后段长l2和l3。利用CAD作图(图2.4)并测量得l2=5325mm,l3=21328mm。
的垂直平分线,其交点C1就是大拉杆与象鼻梁在最大幅度时的连接铰点。连接B1 C1和O1 C1便获得象鼻梁后段长l2和l3。利用CAD作图(图2.4)并测量得l2=5325mm,l3=21328mm。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: