RV-C系列摆线针轮减速机实体建模及动力学分析毕业论文
2020-04-08 14:32:35
摘 要
RV减速机有诸多优点,比如:传动精度高、结构紧凑、整机尺寸小、重量轻、传动比范围大、传动效率高、使用寿命长等等。其众多的传动优点正是人们青睐的对象。随着智能制造以及工业4.0领域的快速发展,目前工业机器人的发展蓬勃。RV与谐波减速机这两种精密减速机被广泛运用于机器人关节处。机器人自身需要高精度的传动,而此两种传动为高精度典型代表。机器人机座以及大负载部位如肩部和大臂主要为 RV 减速机,因为 RV 减速机在刚度与精度方面优势明显。本文对RV-C系列的摆线针轮减速机进行实体建模和动力学分析,具体内容如下:
1)建立摆线轮的标准齿形方程式,模拟摆线轮的齿廓曲线行程
通过了解RV减速机的结构、工作原理,掌握摆线轮的齿廓曲线形成方法,建立摆线轮的标准齿形方程式,利用Matlab,设计摆线轮减速机的齿形轮廓。
2)摆线针轮减速机建模阶段
结合所设计的齿形轮廓,建立RV-C系列某型号的SolidWorks三维几何模型,建立曲柄轴、双柱支撑机构的结构有限元模型,对其进行结构刚度分析。
3)动力学分析阶段
运用ADAMS软件,构建二级RV行星减速机构的动力学模型,分析几何参数对其频率特性、运动特性的影响。
关键词:RV减速机;摆线针轮;建模;双柱支撑机构;动力学分析
Abstract
RV reducer has many advantages, such as high transmission precision, compact structure, small size, light weight, wide range of transmission ratio, high transmission efficiency and long service life.Its many transmission advantages are favored by people. With the rapid development of intelligent manufacturing and industry 4.0, the development of industrial robots is booming. The precision reducer RV and harmonic reducer used in robot joints are widely used.Robot itself needs high precision transmission, and these two kinds of transmission are typical representatives of high precision. The RV reducer is the main part of the robot seat and heavy load such as shoulder and arm because the RV reducer has obvious advantages in stiffness and precision.In this thesis, solid modeling and dynamic analysis of RV-C series cycloid reducer are presented:
1) Establish the standard tooth profile equation of cycloid wheel and simulate the tooth profile curve stroke of cycloid wheel.
Through understanding the structure and working principle of RV reducer, mastering the forming method of tooth profile curve of cycloidal gear, establishing the standard tooth profile equation of cycloidal gear, and designing the profile of gear profile of cycloidal gear reducer by Matlab.
2)the modeling stage of cycloidal pin wheel reducer
Combined with the profile of the tooth profile, a SolidWorks 3D geometric model of a certain type of RV-C series was established, and the structural finite element model of crank shaft and double column bracing mechanism was established, and the structural stiffness of the model was analyzed.
3)Dynamic analysis stage
The dynamic model of the secondary RV planetary reducer is constructed by using ADAMS software, and the influence of geometric parameters on its frequency and motion characteristics is analyzed.
Key words: RV reducer;cycloid pin wheel;modeling;
double column supporting mechanism; dynamics analysis
目录
摘要................................................................................................................................I
Abstract..........................................................................................................................II
第1章 绪论 1
1.1引言 1
1.2选题研究背景及意义 1
1.2.1选题研究背景 1
1.2.2选题研究意义 1
1.3国内外研究现状 1
1.3.1国外研究现状 1
1.3.2国内研究现状 2
1.4本文研究的主要内容 2
第2章RV传动结构及摆线轮齿廓方程 4
2.1 RV减速机传动结构及原理 4
2.2 摆线轮标准齿形方程 5
2.3 RV—C系列减速机摆线轮基本参数的计算 6
2.4 标准摆线针轮齿廓图的绘制 8
2.5本章小结 8
第3章 基于SolidWorks的RV减速机模型 9
3.1 RV-C系列减速机选型 9
3.1.1 RV减速机基本参数 9
3.1.2 RV-C系列减速器的选型计算 9
3.1.3负载特性研究 10
3.1.4研究主轴承功率 11
3.2 RV减速机几何参数及SolidWorks三维结构设计 11
3.2.1 RV-50C摆线轮、行星齿轮、摆线针轮基本参数 11
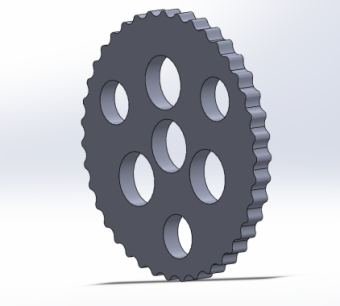
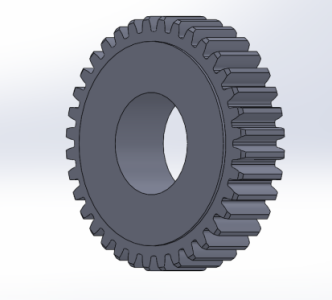
3.2.2 基于SolidWorks的RV-50C减速机三维结构设计 12
3.3本章小结 13
第4章 利用ANSYS软件对主要部件进行强度校核 14
4.1曲柄轴强度校核 14
4.2输入法兰盘强度校核 16
4.3输出法兰盘强度校核 18
4.4双柱支撑机构强度校核 20
4.5输入齿轮轴强度校核 22
4.6本章小结 23
第5章RV减速机第二减速部运动学分析 24
5.1 基于Adams的RV减速机第二减速部运动学模型 24
5.1.1模型的导入 24
5.1.2 Adams初始条件设置 25
5.1.3 建立约束 26
5.1.4 运动学传递关系的建立 27
5.1.5 Adams中遇到的问题 28
5.2 RV减速机的adams仿真 28
5.3 RV减速器固有频率的研究 29
5.3.1 系统的动力学方程 29
5.3.2 求解动力方程 29
5.3.3 计算结果与分析 30
5.4 RV减速器运动特性研究 31
5.5本章小结 34
第6章 经济性与环保性分析 35
6.1经济性分析 35
6.2 环保性分析 35
第7章 总结与展望 36
7.1 全文总结 36
7.2 展望 36
参考文献 37
致谢 39
第1章 绪论
1.1引言
齿轮传动得飞速发展基于其传动的稳定性高,承载能力好以及传动的精度稳定的优点,目前广泛地运用在医药、采矿、纺织等领域。随着科学技术的快速发展,特别是智能制造的深入人心,高精度传动的需求与日俱增,而渐开线的圆柱齿轮由于自身的局限不能很好满足实际的需求。
1.2选题研究背景及意义
1.2.1选题研究背景
RV减速机作为摆线针轮传动众多分支的一种主要传动形式而受到关注。随着智能制造以及工业4.0领域的快速发展,目前工业机器人的发展蓬勃。RV与谐波减速机这两种精密减速机被广泛运用于机器人关节处。机器人自身需要高精度的传动,而此两种传动为高精度典型代表。机器人机座以及大负载部位如肩部和大臂主要为 RV 减速机,因为 RV 减速机在刚度与精度方面优势明显。因此,RV减速机的优点如此之多,近年来被人们广泛运用到精密传动领域。
1.2.2选题研究意义
机器人被越来越广泛的应用于人们的生活和工业生产中。在机器人研究过程中,作为高精度精密传动的RV减速机走入人们的视野。国内对其研究还处于发展阶段,尤其是国内的研究与国外有较大差距。本文的主要研究目的就是对RV减速机进行实体建模和动力学分析,有助于国内的RV减速机的研究。
1.3国内外研究现状
1.3.1国外研究现状
RV传动最早是在1926年,由德国人劳伦兹·勃朗提出的。当时并不叫作RV传动,而是叫做摆线针轮行星齿轮传动。在1931年劳伦兹创建了自己的公司,并开始生产销售。在那之后,日本往友公司嗅到了商业气息,并与劳伦兹的公司签订了技术合作协议,至此摆线针轮减速机被正式引入日本,并与1939年投入生产,但由于当时技术条件的限制,并不能大量投入生产,直到上世纪五十年代,德国人把专利卖给日本,至此以后往友公司六次对摆线减速机进行修形改进。
RV传动的概念最早是由日本帝人公司提出的。随着科技的进步日本往友和帝人两大公司不断更新着RV减速器的版本,日本帝人与日本住友RV减速机如图1-1所示。
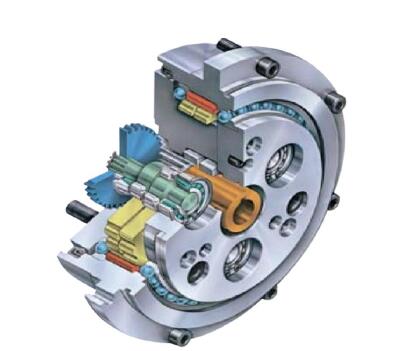
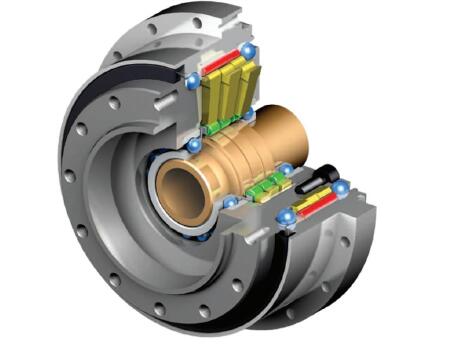
a)日本帝人RV减速机图 b) 日本住友RV减速机图
图1-1 日本帝人与日本住友RV减速机图
1.3.2国内研究现状
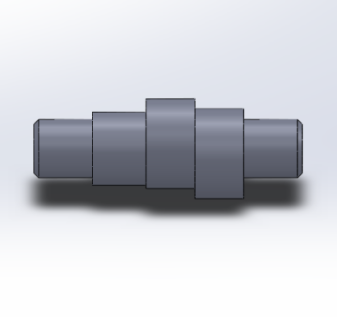
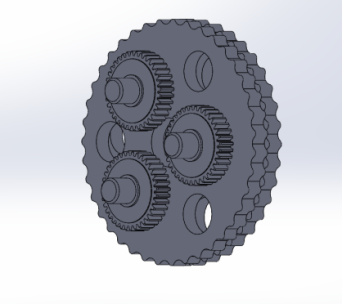
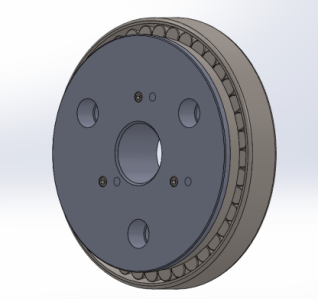
我国研究RV传动比较晚,从上世纪六十年代起,到七十年代初,才开始着手。在九十年代的时候,在国家的大力倡导下,国内校企合作,共同研发了属于国人的摆线针轮减速器。但是国内的减速器与日本的同期产品比较,许多方面都存在着不足,所以RV传动方面的研究任重而道远。图1-2为某国产品牌的RV减速机。
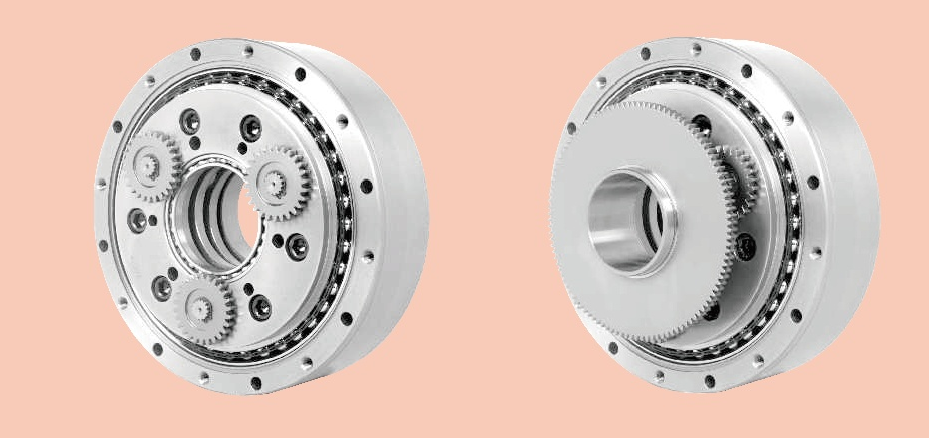
图1-2国产RV-C系列摆线针轮减速机实物图
1.4本文研究的主要内容
第1章:对于 RV 减速机的研究的内容进行了国内外的研究分析,对本文的研究意义进行了阐述,同时对于论文的研究内容进行了介绍。
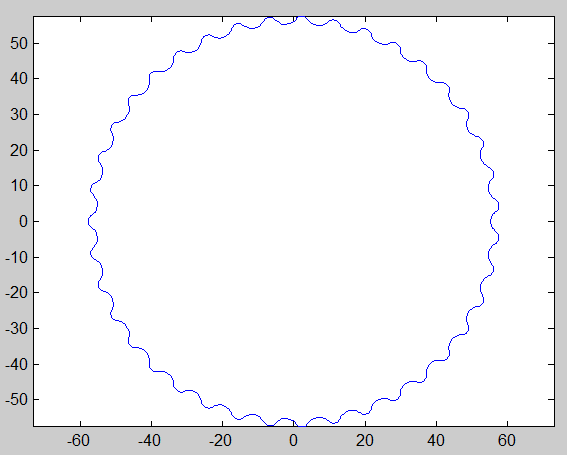
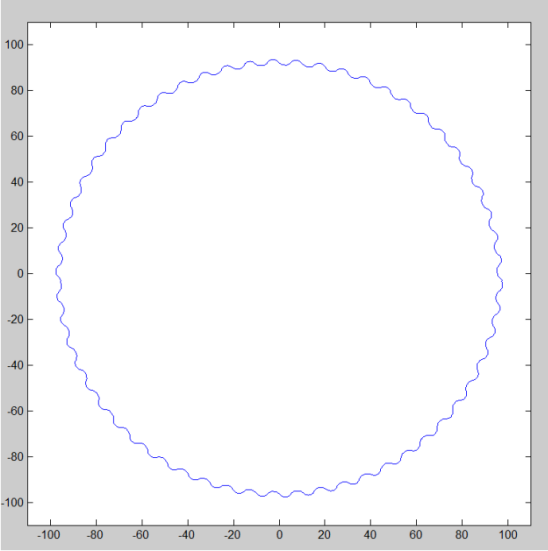
第2章:通过对于RV 减速机传动结构的分析,得出了摆线齿廓的形成原因,从而得出了摆线轮的标准齿形方程式。接着通过对RV—50C系列减速机减速比的计算,进而应用MATLAB绘制了摆线轮的齿廓图。
第3章:首先对RV—C系列的减速机进行了选型,接着对此型号的RV减速机进行SolidWorks建模。
第4章:应用ansys软件,建立曲柄轴、双柱支撑机构的结构有限元模型,对其进行结构刚度分析。
第5章:采用ADAMS软件,构建二级RV行星减速机构的动力学模型,分析几何参数对其频率特性、运动特性的影响。
第6章:对RV减速器的经济性与环保性进行了分析
第7章:对全文进行了总结和展望
第2章RV传动结构及摆线轮齿廓方程
本章将依次介绍RV减速机的传动结构和原理,接着根据摆线轮的齿廓形成原理构造摆线轮的齿廓方程,依据齿廓方程构造摆线轮MATLAB齿廓图,并对比RV-C系列不同的减速机型号的齿廓图。
2.1 RV减速机传动结构及原理
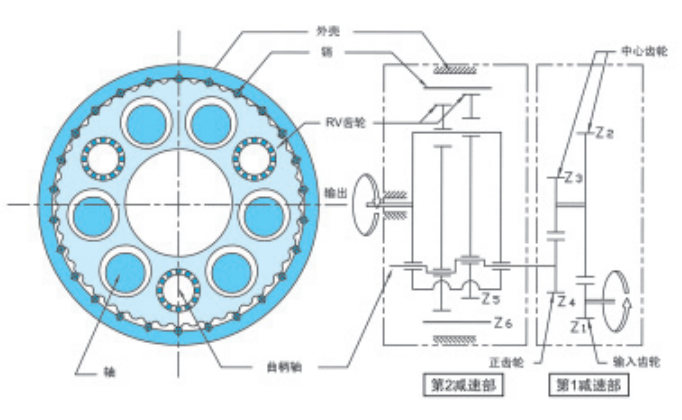
RV减速器拥有两级传动,第一级为渐开线齿轮传动,第二级为摆线针轮传动,其传动简图如图 2-1 所示。
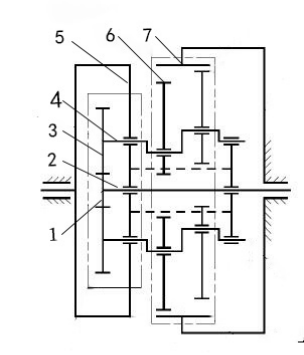
1—中心轮 2—输入齿轮轴 3—行星齿轮 4—曲柄轴 5—输出盘
6—摆线轮 7—摆线针轮
图 2-1 RV 减速机的传动原理图[2]
该减速器的传动原理可简要概括为:第一级传动为齿轮传动,不是本文研究的重点,所以不一一介绍,重点介绍下第二级传动,也是RV减速机神秘的地方:摆线针轮传动。第一级传动将动力传导至输入轴2上,输入轴与三个行星齿轮3相啮合,三个行星齿轮上分别固定着一个曲柄轴4,曲柄轴又与摆线轮6相连(轴承连接),摆线轮与针轮7相啮合,将动力由针轮输出。这只是RV-C减速机的一种输出方式,也是本文研究的重点,RV-C减速机有很多种使用方法,还有一种比较常用的就是由针轮(以下称为针齿壳)输入,输入轴输出。本文主要研究第一种方法,另外的使用方法大同小异,不一一做分析。
2.2 摆线轮标准齿形方程
和标准针轮相啮合,与针齿共扼且无啮合间隙的摆线轮齿形称为标准齿形。
则理论齿廓上任一点M的坐标如式2-1[3]所示:
因为 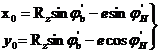 (2-1)
(2-1)
所以  (2-2)
(2-2)
又  (2-3)
(2-3)
所以  (2-4)
(2-4)
将以上两式代入公式2-1中,则得到摆线轮的理论齿廓曲线的参数方程式为
 (2-5)
(2-5)
令针齿套半径为rz, M点的公法线与X轴线的夹角为β。则摆线轮的实际齿廓(短幅外摆线的等距曲线)上K点的坐标(x, y)为:
(2-6)

式中
 (2-7)
(2-7)
将(2-7)带入(2-6)得:
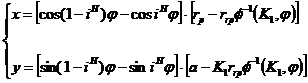 (2-8)[4]
(2-8)[4]
式中,i H为二级传动相对传动比,i H=zp/zc; 为啮合相位角,单位(°); 
 。
。
2.3 RV—C系列减速机摆线轮基本参数的计算
已知RV-50C基本参数,如表2-1所示,
表2-1 RV-50C基本参数[2]
减速机的单体速比值R1 | 中心齿轮大齿轮的齿数Z2 | 中心齿轮小齿轮的齿数Z3 | 正齿轮的齿数(行星轮)Z4 |
1390/58 | 78 | 61 | 36 |
由图2-2可知,第1减速部位与第2减速部相加得到的减速比i因使用方法而异,可以根据下列公式所示的速比值算出旋转轴的情况。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: