利用延迟反馈控制器对集装箱起重机的控制外文翻译资料
2022-10-27 11:17:38

英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
利用延迟反馈控制器对集装箱起重机的控制
齐亚德N.马苏德阿里·奈佛(工程科学和力学部,MC 0219,弗吉尼亚理工学院,布莱克斯堡,弗吉尼亚州24061,美国)
(收到:2001,十月2;接受:2003,五月28)
摘要:传统上,集装箱起重机被建模为一个简单的钟摆,在电缆末端有一个柔性的或刚性的起升电缆,以及一个集总质量。在大型集装箱起重机的情况下,实际配置的起升机构有着明显的不同。它通常由四个起升电缆的组成,它是悬挂在小车四个不同点并且附在负荷侧支撑杆的四个点上用来起吊集装箱。因此,实际集装箱起重机装配的动力学与一个简单的倒立摆是不同的。基于实际模型的控制器设计更可能导致改进的响应,在这项工作中,实际集装箱起重机的数学模型正在开发。然后,该模型的一个简化的版本被用来计算延迟控制器开发的增益和延迟。应用延迟控制器的集装箱起重机的全非线性模型进行数值模拟。
关键词:起重机控制,集装箱起重机,延迟反馈控制器。
1.介绍
起重机越来越多地用于运输和施工中。他们也需要变得更大,速度更快,更高,有效的控制器以保证快速周转时间并满足安全要求。近40年来对起重机建模与控制的研究越来越有兴趣了。
龙门起重机传统建模为一个起升线,一个钩,和一个支撑机构(拉杆)。在支撑机构上的电缆钩有效载荷组件被暂停。支撑机构将吊点周围的吊点移动到起重机的工作空间,而起升机构升降并降低了有效载荷,以避免路径上的障碍,并将有效载荷存入目标点。
门式起重机通常为二维建模。最常见的建模方法是应用集中质量和分布质量的方法。在分布式海量AP法,钢丝绳被建模为一个分布式的质量系统,钩载荷集中为一个点的质量作为边界条件,形成这种分布式的质量体系。这一类的唯一可用的模型是诺维尔-安德里亚 [ 1,2 ]等人的平面模型和诺维尔-安德里亚和布斯塔尼[ 3 ]改革为龙门起重机电缆的平衡位置附近的线性化。乔希和拉恩[ 4 ],马丁[ 5 ]等人和拉恩[ 6 ]等人利用波动方程忽略惯性载荷使之成为一个完美的灵活的模型电缆。诺维尔-安德里亚和同事的拓展模型通过改变负载的边界条件,包括有效负载的惯性。
集总质量法是起重机建模中应用最广泛的方法。吊装线被建模为一个无质量的刚性电缆。有效载荷是集总钩和建模为点质量[ 7 ]。
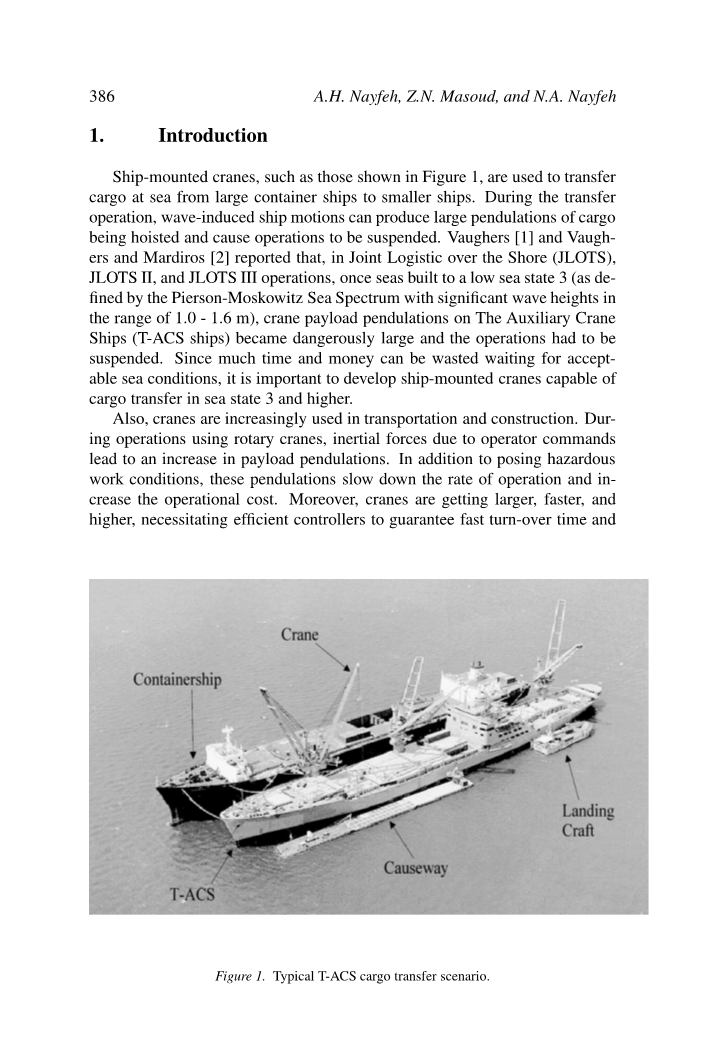
在大型集装箱起重机的情况下,起升机构的实际结构与一个简单的摆杆有很大的不同,有一个集总质量(图1)。它通常由四个吊装电缆的安排,而后从台车上的四个不同点并且附在负荷侧支撑杆的四个点上用来起吊集装箱。
工厂处理一个非线性起重机控制模型的复杂性,大多数都做线性化模型,这种简化的代价降低控制器的坚固性。伯格[ 8 ]等人报道说,在一个状态空间模型中,一个被忽视的非线性可能会对一个线性控制器的性能产生显著的影响。计算机仿真结果表明,线性控制器只提供了在一个固定的工作范围,小的摆动角度在负载平衡点可接受的性能。因此,在起重机控制策略的基础上进行非线性起重机模型的设计有了越来越大的兴趣。
龙门起重机的一个最新发展是一个多点的支付负载悬架的介绍。这种设计可以提高电缆的有效载荷系统的刚度,从而更耐时。此外,新的控制方案已经出台,采用多点暂停来抑制负载摆动的差异在各种悬索张力之间的微分[ 9,10 ]。这种控制方法需要一个模型,将负载作为一个刚体,而不是一个点质量。截至目前,我们没有意识到任何这样的模式在文献中。
由于实际集装箱起重机吊装过程中的动力学与一个简单的倒立摆有着不同的动态特性,因此在实际的模型设计的基础上,更容易产生改进的响应。在这项工作中,实际集装箱起重机的数学模型在被开发。该模型的一个简化版本是用来计算由亨利等人[ 11 ]开发的延时控制器的增益和延迟,应用延迟控制器对集装箱起重机的全非线性模型进行了数值模拟。
一个显着的研究工作一直致力于在过去的四年中的发展,以提高起重机操作的控制策略,效率和安全。拉赫曼阿卜杜勒[ 12 ]等对1961年的起重机建模与控制进行了全面的文献回顾,这项研究涵盖了150篇期刊论文、会议论文和报告。最广泛使用的控制方案是输入整形和最优控制。
输入整形和最优控制技术是有限的,它们在起重机参数值的名义值和变化的初始条件以及外部干扰[ 13-15 ]有非常敏感的变化。事实上,大量研究致力于开发更好的近似起重机参数[ 16,17 ]。虽然一个良好的设计,可以最大限度地减少控制器的灵敏度的变化在有效载荷质量上,它是更难以减轻的是在电缆长度上控制器的灵敏度变化。事实上,singhose[ 18 ]等人表明输入整形技术对摆动频率的程度是敏感的,在起重机的机动包括吊装方面他们遭受明显的降解。
模糊逻辑和自适应控制技术也被用来补充输入整形技术。而混合动力技术已经产生强大的和有效的控制策略的潜力,体验到现在表明,使用这些技术的控制策略的设计方法是不平凡的。模糊逻辑的策略是特别难调,控制输入太高,生产周期调冲在目标点,太低,产生一个非常缓慢的和费时的接近目标点。此外,在所有的文学策略限制起重机操作一个预定义的路径。
而闭环控制可用于缓解输入整形技术研究这些问题,它不会随时间最优控制技术,因为它可能会导致未来。
- 数学模型
在这项工作中,一个二维数学模型的一个典型的集装箱起重机,如图2所示。容器是用吊架抓住。在二维模型显示,吊架由悬挂小车用一组四线吊起。电缆与小车间隔距离D,与吊具杆距离W。
无轨电车是由一个代表操作员输入的函数驱动的。起升电缆的长度(吨)也有时间的作用,并由操作者输入的起升电机控制。吊装电缆在这模型是可变长度的刚性无质量链接。
容器的运动约束变分方程可以写成:delta;qT[Mq - QA] = 0 。 (1)
当广义坐标的向量q= [x, y,theta;],惯性矩阵M= diag[m, m, J]和广义应用力的向量QA= [0, minus;mg,0]时,结合运动和驱动约束可以写成Phi;(q,t) = 0。 (2)
双距离约束被施加到容器的运动。这些约束的具体方程是:
使用拉格朗日乘子,一个可以写的混合微分代数的约束方程组的运动为[ 22 ]:
当
3.延迟反馈控制器
为了控制器设计的目的,考虑到集装箱的运动约束,设计了图2的简化模型。这种简化性模型来选择控制器参数,然后应用到原模型的运动方程。
3.1简化的数学模型
集装箱起重机模型(图2)可以简化为一个双摆系统的两固定长度的链接和运动学约束有关的角度phi;和theta;。简化模型如图3所示
3.1。简化的数学模型
集装箱起重机模型(图2)可以简化为一个双摆系统的两固定长度的链接和运动学约束有关的角度phi;和theta;。简化模型如图3所示。从图2的回路ABCD关闭约束可以写为;
已知phi;asymp;(1/2)(phi;1 phi;2)和假设小角度,我们得到角phi;和theta;是:
从图3可以得到惯性矢量OQ:
假设阻力与速度呈线性关系,我们发现这种约束运动双摆系统的方程是:
3.2控制器的设计
开发较早的亨利等人[11}被延迟反馈控制器。它采取以下形式:
XO(t)是操作者输入。假设输入是恒定的或缓慢变化的和替代通用控制器的形式,方程(10)为简化系统的运动方程,方程(9)我们发现,在快速变化的运动控制方程的线性化。
将方程(12)代入方程(11),我们可以得到以下线性化系统的运动控制方程,
方程(13)类似于一个简单的摆运动的线性化控制方程,但随着振荡周期T的振荡,控制器的延迟tau;是基于修改后的时间。控制器增益系数k和延迟tau;合成的期望阻尼是从控制摆的阻尼图中选出。
4.数值模拟
对于控制器的性能进行了数值验证,完整的非线性方程的原始模型,方程(4)使用操作者输入XO(T)输入到控制器,方程(12)。控制器的输出(吨),以及与操作员输入升(吨),然后直接输入的非线性方程组的全模型方程(4)。控制和不受控制的情况下提出,消除突发输入系统的变化,我们增加了一个低通滤波器控制器输出控制。从该滤波器产生的额外延迟补偿用于在控制器的延迟命令中。
为了演示控制器的坚韧性,我们模拟了三种情况下,覆盖所有的通常的货物装卸演习。吊装电缆的选择起重机这些模拟的间隔距离为1.6米的小车,在支撑杆0.8米的距离,产生一个角比为。0.4个组合控制器增益常数K和一个0.28t控制器延迟使用。
在第一种情况下,启动模拟与重心的负载放置35米以下的小车。载荷的重心上升到约20米以下的小车在感动中水平方向50米。操作员指令加速度和相应的货物轨迹显示在图5。
图6为可控和不可控的模拟货物摇摆。5秒的指挥演习结束时,控制系统的货物晃动明显降低幅度不明显。控制器的横向加速度输入系统相比,不受控制的算子遍历输入加速度图7所示。
在第二种情况下,模拟开始与负载的重心放置在20米以下的小车。小车穿过50米,靠近导线的末端,将负载重心降低到小车下方的约35米处。
货物的运动是在小车的导线运动结束后继续进行的。操作员命令的加速度和相应的货物轨迹如图8所示。图9显示了控制和不受控制的模拟货物晃动。在5秒的指挥演习结束时,控制系统的货物晃动减少到一个不起眼的振幅而不受控制的模拟显示一个大的晃动。控制器的横向加速度的输入到系统的不受控制的操作人员的输入加速度的比较显示在图10。
第三种情况是第一和第二种情况的结合。该模拟是开始与重心的负载放置在35米以下的小车。该负荷中心的重心是吊到20米以下的小车,而小车水平移动50米。在横动的末端附近,重心的负载降低到约35米以下的小车。货物的降低运动是在开始,并继续结束后的移动小车的导线。操作员命令的加速度和相应的货物轨迹显示在图11。
受控和不受控制的模拟的货物晃动如图12所示。在前两种情况下,控制系统的货物摇摆是减少到一个不起眼的振幅在5秒内的指挥演习结束而不受控制的模拟显示一个大的晃动。控制器的横向加速度输入到系统相比,不受控制的操作员遍历输入加速度如图13所示
5.结束语
延迟控制器是一种有效的手段,消除货物摇摆在龙门起重机,从操作员命令造成的。该控制器不需要详细和精确的识别系统控制。一种基于简化模型的控制器,是保证实际系统的鲁棒性行为所必需的。这大大简化了控制器的设计过程。
延迟控制器不锁操作人员的演习。而不是直接转移到起重机执行器,操作员的命令被路由通过控制器第一。该动作的结束点不必是一个预先设定的参数,这意味着该控制器可以处理几乎任何随机操作输入。控制器的能力,显着减少货物晃动,减少起重机操作员的负担。在一个人可以操作一台带有延时控制器的门式起重机之前,需要较少的训练。
参考文献:
1.诺维尔-安德里亚,布斯塔尼,康拉德的桥式起重机的控制:稳定的弹性—
城市的边界控制和边界变化:诉讼的IFIP WG 7.2会议上,索菲亚-法国,1990,pp. 1–26。
2.诺维尔-安德里亚,布斯塔尼,康拉德反馈镇定一个混合的偏微分方程系统:应用于桥式起重机的控制信号和系统的数学,7,1994,1,22。
3.诺维尔-安德里亚,布斯塔尼,桥式起重机的控制:一个反馈镇定偏微分方程系统,在诉讼的第一个欧洲控制会议:ECC 91,格勒诺布尔,法国,1991、2244页–2249。
4.乔希和拉恩,“柔性电缆起重机位置控制:理论和实验”,在诉讼的美国控制会议,西雅图,华盛顿,1995,pp. 2820–2824。
5.马丁,道森,朱和拉恩,是“一二近似的非线性控制桥式起重机的理论与实验研究,在美国控制的过程中发布会上,西雅图,华盛顿,1995,pp. 301–305。
6.拉恩, 张, 乔希, 和道森,渐近稳定的一角反馈柔性电缆龙门吊、期刊动态系统、测量与控制,121,1999,563,566–。
7. 奈佛和穆克,“动力学与控制的船舶起重机,在诉讼第三十九结构,结构动力学,材料会议,aiaa-98-1731,长滩,CA,1998。
8. 伯格,道森,拉恩和罗德,“天车通过饱和非线性控制钢的控制方法,在诉讼的国际电子和电气工程师协会机器人与自动化大会,明尼阿波利斯,锰,1996,pp. 3155–3160。
9.钱皮恩,货物系统国际16(8),1989,63 - 67。
10.哈贝尔,科赫和麦考密克, 现代起重机控制增强,港口92年,西雅图,1992,pp. 757–767。
11.亨利, 马苏德, 奈佛,和穆克.“货物摆动减少船上通过臂架俯仰角驱动的起重机、振动与控制学报7,20
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[153699],资料为PDF文档或Word文档,PDF文档可免费转换为Word



