MQ2538港口装卸四连杆门座式起重机回转机构CADCAE毕业论文
2020-02-19 19:26:01
摘 要
近年来,随着经济全球化的进行,国际贸易量越来越大,港口运输作为进出口贸易的主要方式之一,在其中的作用越来越重要,港口机械的需求更大,要求越来越高。门座式起重机作为港口机械的核心之一,其研究与应用尤其重要,其中回转机构的平稳运行对于门座式起重机有非常关键的作用。
本文对MQ2538四连杆门座式起重机的回转机构进行了详细研究,主要工作有:
- 对整体机构尺寸进行设计;水平位移补偿设计与校验;杠杆-活对重平衡设计与校验;验证整机抗倾覆稳定性并进行了基础轮压的校验;
- 选定回转支承的形式与支承的型号;选择合适的电动机、减速器、制动器、联轴器等,进行相应的校验;
- SolidWorks建模与adams仿真。
关键词:门座式起重机;整体设计;回转机构
Abstract
In recent years, with the progress of economic globalization, the volume of international trade is increasing. Port transportation is one of the main ways of import and export trade, and its role is becoming more and more important. The demand for port machinery is greater and higher. As one of the core of port machinery, the research and application of gantry crane is particularly important, in which the smooth operation of rotary mechanism plays a very key role in gantry crane.
In this dissertation-, the slewing mechanism of MQ2538 four-link portal crane is studied in detail. The main work includes:
1) Design the overall mechanism size; design and calibration of horizontal displacement compensation; design and verification of leveraged pair weight balance; verify overall anti-overturning stability and verify the basic wheel pressure;
2) Select the type of slewing bearing and the type of support; select the appropriate motor, reducer, brake, coupling
3) SolidWorks modeling and adams simulation.
Key words: portal crane; overall design; slewing mechanism
目 录
摘要 I
Abstract II
第1章 绪论 1
1.1背景 1
1.2国内外研究现状 2
第2章 总体设计 4
2.1概述 4
2.2臂架主尺寸确定 5
2.2.1臂架尺寸计算 5
2.2.2货物水平位移校验 8
2.3货物自重平衡系统设计 10
2.3.1平衡系统设计 10
2.3.2臂架平衡系统的校验 11
2.4自重力矩计算 14
2.5风力矩计算 17
2.5.1 风载荷 17
2.5.2风力矩 17
2.6整机抗倾覆稳定性计算 20
2.7轮压计算 21
第3章回转机构设计 24
3.1 回转支承装置类型的选择 24
3.2 回转支承装置滚柱接触校核 25
3.2.1 计算载荷 25
3.2.2 滚道接触应力计算 27
3.3 回转驱动装置 28
3.3.1回转阻力矩计算 29
3.3.2电动机的选择与校核 30
3.3.3减速器的选择 32
3.3.4极限力矩联轴器的选定与计算 33
3.3.5选择制动器 33
第4章 三维建模与仿真 35
4.1 三维建模 35
4.1.1零件模型 35
4.1.2建立装配体 38
4.2Adams建模仿真 39
第5章 技术与经济性分析 43
5.1 环境影响分析 43
5.2 经济性分析 43
第6章 总结与展望 44
6.1 总结 44
6.2 展望 45
参考文献 46
致谢 47
第1章 绪论
1.1背景
随着电子商务、经济全球化的快速发展,物流行业开始了全球化进程,在此背景下我国的对外贸易总量正持续增长,而在各种不同的运输方式中,港口运输由于集货、配货、存货的优势,运输成本较其他方式更低,在各国贸易运输中占有很大比例。外贸经济是我国经济增长的最重要引擎,30年来年均增速17.4%,高于GDP增长近一倍,1990~2008年货物吞吐量增速达到14.1%,港口吞吐量占41.5%[1]。物流的全球化带来的是港口业务发展更加地迅速,要实现更高的工作效率,就要数量更大、质量更高的装卸、搬运、运输、分配等机械。
港口的快速发展离不开港口装卸机械的高速化、自动化、智能化、集成化,其有利于港口各项功能的升级换代,是当今世界对于工业化各种类型的机械的重要的发展方向与发展趋势。港口机械的研究与发展是港口工作的核心之一,只有更加高效、安全、稳定的装卸机械方才能够满足现如今港口运输的要求,才能在经济全球化浪潮中取得先机,更好地抓紧发展机遇,带动港口产业经济带向更快、更好、更稳的方向发展。高质量高性能的机械在其中的作用不可缺少,现今对于装卸类机械要求拥有更轻的质量、更大的刚度、更大的工作空间、更快的速度、更高的效率、更高的稳定性与安全性能,因此对于以往的设计方法的改进非常重要,在不断地更新的同时,进行充实与完善,学习西方国家的一些先进的设计经验,弥补自身,同时发挥艰苦奋斗的精神,加大对于港口机械创新研究的时间投入,实现新产品的功能性、经济性与可靠性的全面提升。
在港口运输机械中,起重机械占有重要地位,在生产过程中有重要作用。起重机械是起升、搬运、装卸物料及各种产品的机具,有优良的装卸性能,装卸堆码的速度快,基础建设成本低,工作空间大,装卸效率高,投入产出的回报率高,工作性能非常稳定,非常适合港口复杂的工作环境,还可以根据港口的水深与港口的货物吞吐量的要求等实际工作情况进行不同的施工设计,有非常良好的适应性能,对于不同的产品类型与不同的装卸类型,可以应用和设计不同类型的起重机进行装卸作业。在港口货物装卸作业中对于各种类型集装箱的装卸可以一次性装卸大量的货物,提高劳动生产率,可以减轻大量的体力劳动,大大地缩短生产周期和成本。在工业化生产中,随工业化的发展,起重机械在各个工业领域,如交通运输、冶金、建筑、造船、国防等,应用越来越广泛,在国家现代化建设的作用越来越重要,为国家现代化建设的进程加速,是实现机械化、自动化的重要工具。起重机械已成为出产力的重要因素,在出产中进行着高效的工作,是组成流水作业与批量作业的基础,现代化出产的重要标志之一[2]。
为了应对经济全球化的挑战,抓住时代的新机遇,同时加速工业化的前进脚步,国家对起重机械及其设备的投入日益增加,不仅实现起重机械从无到有、由小到大逐步发展,而且已经能够独立研发、自主生产各种类型的起重机,更有部分跻身于世界一流的行列,不足的是我们在起重机械制造领域还很薄弱,设计能力有待于提升,因为起重机械的发展时间不长,设计的经验少,设计方法不够先进,尤其是有些地方对于精益细节的处理还不是很到位,还有制造能力与设计水平不匹配,加工工艺不是非常成熟,设备的制造精度不够,这些不足和缺陷亟待解决。
门座起重机是随着港口事业的发展而发展起来的,在港口的物流运输等方面发挥着重要的作用[3-6]。四连杆组合臂架式门座起重机作为港口装卸的主要机型之一,是我国港口使用最广的设备,广泛应用于件杂货、散货的装卸作业,整机和机构的工作级别较高,回转机构作为其最重要的结构之一,其研究与分析十分重要。
1.2国内外研究现状
我国目前对于起重机的研究已经到了较高的水平,设计方法与设计理论较以前有了很大的改善,设计理念更加先进。目前使用的虚拟样机技术相对于传统的设计有很大不同,以往主要是用CAD软件技术进行设计工作,如今的虚拟样机技术将零部件的设计与分析相结合,设计方便的同时对相关技术的应用也更加方便,可以在设计时及时发现问题并进行修改,提高设计的效率。虚拟样机的使用极大方便了机械设计过程,对传统的设计理念造成了极大的冲击[8-10]。
武汉理工大学的李芳与胡吉全分析门机回转机构起制动时惯性载荷对传动装置性能的影响, 计算出各种工况下电机的功率以及减速器输出轴所受的外阻力矩, 作为回转机构传动系统选型计算的依据[12]。传动装置的性能优劣直接决定了系统工作机构的运行的能力,对降低成本有重要意义。惯性载荷对回转机构的传动机构的冲击与振动,容易破坏减速器输出轴,研究其影响从而确定传动系统的选型方式有重要意义[11-14]。臂架系统与自重平衡系统是设计门座起重机主体尺寸的关键所在,其设计优化对门座起重机的整体设计和整体结构的优化有重要的意义[15]。 Si Li FAN等人对臂架提升系统的机械动力学进行了分析,在不考虑控制效果的情况下,吊臂系统的动力学响应有很大的波动, 为起重机提升系统优化控制策略提供了理论依据[16-18]。
从目前的港口机械发展情况以及国际贸易形势看,港口起重机械还有很大的发展空间,以后的主要发展方向是:
(1)实现装卸机械大型化、专业化
工业生产的规模比以前更大,生产中装卸搬运的费用比例越来越大,对起重机的能耗和安全性能的要求更高,对货物的起重重量的要求越来越大,对大型的起重机的需求越来越大,港口起重机械只有实现大型化、专业化,才能适应现今对于不断增长的对外贸易,增大各个港口的货物吞吐能力,适应集装箱化发展需要。
(2)实现装卸机械轻型化
减轻起重机自重一直是个重要的课题,采用新的设计方法,更加稳定的结构形式,既能实现轻型化目标又能增强安全性能。对轻型化机械的研究可以提高设计人员的设计能力,增加设计经验,对精益部分的控制能力也会更强,改进机构的设计方法,提高机械制造工艺能力。
(3)机械技术结合电子科技
现如今的电子科技非常发达,如先进的微机控制可以精确控制起重机的驱动和操作,实现机械的自动化,大大提高了机械的操作精度,提升了机械的操作性能与工作性能,提升其工作的稳定性与安全性。电气传动与机械化系统相结合,可以提高装卸机械的工作效率,实时监控机械的运行状态,先进的控制系统还可以进行机械系统的自动控制,实现货物装卸机械的智能化工作。
第2章 总体设计
2.1概述
MQ2538门座式起重机的额定起重量为25t,最大幅度为38m,是一种间歇工作的机械,工作特点为短暂、重复、周期循环。回转机构每个工作循环包括满载和空载两种状态,每个工作循环中做正向与反向的交替运动,起制动非常频繁,受到的载荷的大小和方向都是变化的。
门座起重机组成:
1)工作机构:
工作机构可以执行不同的运动,起重机调运货物到不同的位置,满足货物的装卸、搬运、安装等要求。分为:
- 起升机构:实现货物的升降;
- 运行机构:使整机在轨道上运行;
- 变幅机构:改变货物到回转中心的距离;变幅机构的臂架系统采用刚性四连杆臂架系统。
(4)回转机构:使回转部分相对于非回转部分旋转,实现货物的水平位移。
- 金属结构
构成整个机械的骨架,各个工作机构的载体,各部件主要采用稳定性能好,承载能力强的箱型梁结构,承受载荷并将其传递到轨道上,最后作用在基础上。
- 传动与控制机构
传动装置为各个工作机构提供能量并提供运动,控制系统通过各种机械传动和电信号对工作机构进行控制作业,实现起重机工作机构的启动、调速与停止。
- 安全辅助装置
为了使起重机安全稳定地进行工作而设置的装置,如起重量限制器限制货物的重量,货物超过限制时脱钩;限位开关可以防止机构超过工作行程,保护机构安全正常工作;缓冲器在起重机与其他物体相碰时有缓冲作用,避免起重机遭到破坏;夹轨器在非工作状态时使起重机不会因为风载荷的作用而运动。
门座起重机主要参数如表2.1所示。
表2.1 起重机主要参数表
项目名称 | 数值 | |
起重量 | 25t | |
工作幅度 | 最大/最小幅度 | 38/14m |
起升高度 | 轨上/轨下 | 30m/18m |
机构工作速度 /工作级别 | 起升机构M8 | 40 m/min |
变幅机构M7 | 55m/min | |
回转机构M7 | 1.5r/min | |
运行机构M4 | 30m/min | |
风速 | 工作最大风速 | 20m/s |
非工作最大风速 | 55m/s | |
轨距/基距 | 10.8m/10.8m | |
最大许用轮压 | 250kN | |
尾部最大回转半径
| 6m | |
轨道型号 | QU80 | |
2.2臂架主尺寸确定
2.2.1臂架尺寸计算
四连杆组合臂架系统在货物水平位移系统的设计中应用最为广泛,主要由臂架、象鼻梁、刚性拉杆等组成。臂架系统的优点是刚性较好,而且起升滑轮倍率大小不改变货物变幅时的水平位移,合理设计臂架各个构件的尺寸可以使臂架在变幅运动时象鼻梁的运动轨迹接近于水平;缺点是系统的结构比较复杂,自重较其他系统大,货物在变幅过程中有部分位置的高度变化比较大,速度变化较大。
根据货物水平位移的要求,货物的高度基本保持不变,而起升滑轮组在变幅时不改变其水平位移,所以起升绳的长度保持不变,由此可知象鼻梁的端点的水平高度基本保持不变。以臂架的下铰点为原点,水平方向为x轴,竖直方向为y轴,由图2.1可知臂架端点的坐标,根据起重机的各个构件的结构尺寸,可以得到其在变幅运动过程中的象鼻梁端点的轨迹方程。
 图2.1 象鼻梁端点轨迹计算图
图2.1 象鼻梁端点轨迹计算图
(1)象鼻梁端点的坐标轨迹方程组
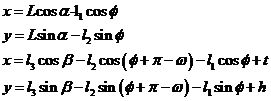 (2.1)
(2.1)
对方程组进行整理得:
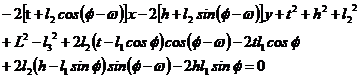 (2.2)
(2.2)
式中 ω—象鼻梁与臂架铰点的位置的角度
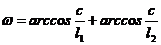 (2.3)
(2.3)
Φ-象鼻梁前臂与水平线的夹角
 (2.4)
(2.4)
L—臂架长度(m);
α—转台平面与臂架的夹角 (°);
β—拉杆与水平线的夹角(°);
l1—象鼻梁前臂长(m);
l2—象鼻梁后臂长(m);
l3—大拉杆的长度(m);
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: