2500吨小时抓斗卸船机海、陆侧上横梁设计及三维建模毕业论文
2020-02-19 19:22:19
摘 要
桥式抓斗卸船机因其良好的操作性和经济性等突出优点,已经成为了当今港口散货物料的主要装卸设备,因此,对桥式抓斗卸船机的研究对于港口运输的发展有十分重要的意义。本文针对一种2500t/h桥式抓斗卸船机进行了整机轮压和稳定性验算以及对卸船机上的海、陆侧上横梁进行三维建模并进行强度、刚度、稳定性的验算。通过对卸船机结构和实际使用过程中的承载分析,利用力矩平衡的原理,验算卸船机的轮压和抗倾覆稳定性是否符合要求;验算卸船机海、陆侧上横梁在各种工况载荷下的强度、刚度和稳定性,并确定其结构的合理性;利用solidworks三维建模软件建立海、陆侧上横梁中各零部件的三维模型,并完成装配,进行结构分析。通过此计算说明,表明此卸船机的相关设计符合要求。经过此次设计,有效检验了自己的专业能力,也暴露了学习中的不足,对自己未来的职业生涯有重要意义。
关键词:桥式抓斗卸船机;稳定性;三维建模
Abstract
Bridge grab ship unloader has become the main loading and unloading equipment for bulk materials in ports due to its excellent operability and economy. Therefore, the research on bridge grab ship unloader is of great significance for the development of port transportation. In this paper, the wheel pressure and stability checking calculation of a 2500t/h bridge grab ship unloader are carried out, as well as the 3d modeling and checking calculation of strength, stiffness and stability of the upper beam on the land and sea sides of the ship unloader. Based on the analysis of the structure of the ship unloader and the load carrying capacity in actual use, the wheel pressure and anti-overturning stability of the ship unloader are checked and calculated according to the principle of torque balance. The strength, stiffness and stability of the upper beam on the land and sea side of the ship unloader under various working conditions are checked, and its reasonable structure is determined. Solidworks 3d modeling software is used to establish 3d models of various parts in the upper beam on the land and sea sides, complete assembly and conduct structural analysis. The calculation shows that the design of the ship unloader meets the requirements. Through this design, I have effectively tested my professional ability and exposed my deficiencies in learning, which is of great significance for my future career.
Keywords: bridge grab ship unloader; Stability; 3 d modeling
目录
第1章 绪论 1
1.1桥式抓斗卸船机 1
1.2 Solidworks三维建模 1
第2章 总体轮压及抗倾覆稳定性计算 3
2.1总体轮压计算 3
2.1.1重力(垂直)载荷产生的轮压计算原理 3
2.1.2重力载荷在不同工况下的重力矩计算 5
2.1.2.1金属结构部分 5
2.1.2.2前大梁总成 7
2.1.2.3整机重力载荷及产生轮压 8
2.1.2.4小车总成产生轮压 8
2.1.2风(水平)载荷计算 10
2.1.2.1风垂直大车轨道 10
2.1.2.2风平行大车轨道 13
2.1..3.不同工况下所产生的轮压组合 16
2.2整机稳定性计算 18
2.2.1卸船机在静载情况的稳定性 19
2.2.1.1小车在最大前伸距 19
2.2.1.2小车在最大后伸距 19
2.2.2卸船机在动载情况下的稳定性 19
2.2.3钢丝绳断裂时的稳定性 22
第3章 海、陆侧上横梁结构设计 23
3.1海侧上横梁 23
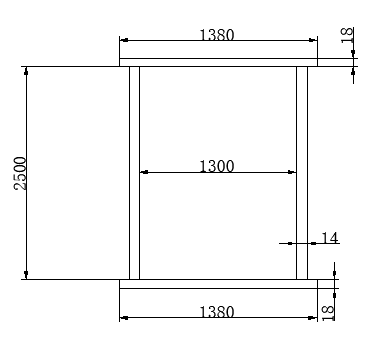
3.1.1海侧上横梁截面几何特性计算 23
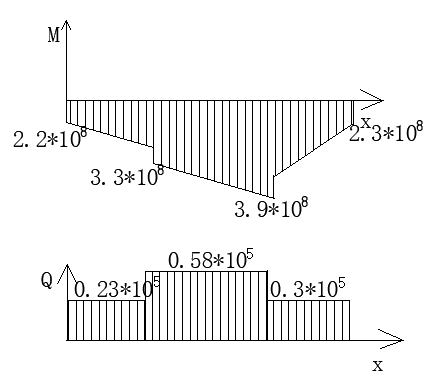
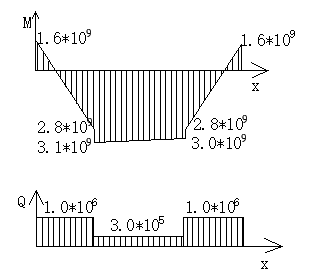
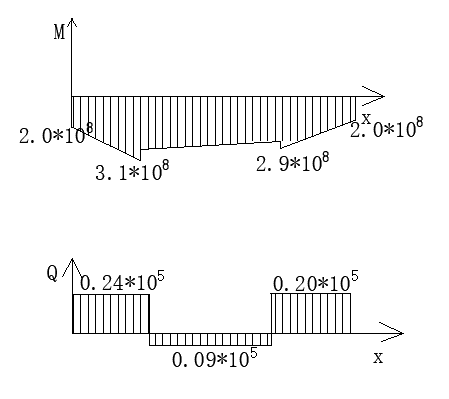
3.1.2.海侧上横梁内力计算 24
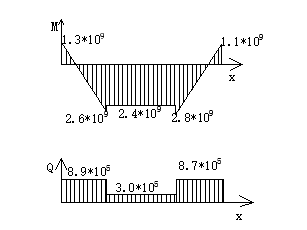
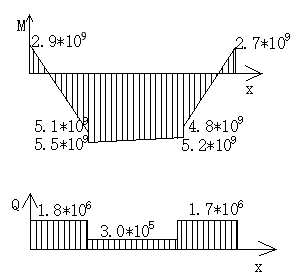
3.1.2.1弯矩和剪力 24
3.1.3危险截面的强度验算 27
3.1.3.1截面弯曲正应力的验算 27
3.1.3.2截面的弯曲剪应力验算 29
3.1.3.3扭转载荷引起的剪应力 32
3.1.3.4危险截面强度验算 33
3.1.4.梁的刚度验算 33
3.1.5梁的稳定性验算 34
3.1.5.1梁的整体稳定性 34
3.1.5.2梁的局部稳定性 34
3.1.5.3横隔板和纵向加劲肋的尺寸确定 34
3.2陆侧上横梁 35
3.2.1陆侧上横梁截面几何特性计算 35
3.2.2陆侧上横梁内力计算 36
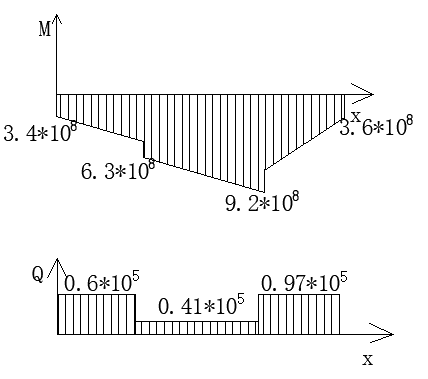
3.2.2.1弯矩和剪力 36
3.2.3危险截面的强度验算 39
3.2.3.1截面弯曲正应力的验算 39
3.2.3.2危险截面的弯曲剪应力验算 41
3.2.3.3扭转载荷引起的剪应力 43
3.2.3.4危险截面强度验算 44
3.2.4梁的刚度验算 44
3.2.5梁的稳定性验算 45
3.2.5.1梁的整体稳定性 45
3.2.5.2梁的局部稳定性 45
3.2.5.3横隔板和纵向加劲肋的尺寸确定 46
第4章 海、陆侧上横梁的三维建模 47
4.1Solidworks三维建模的目的及意义 47
4.2海、陆侧上横梁的三维建模 47
4.2.1零件的三维建模 47
4.2.2三维零件的装配 49
4.3由三维模型生成工程图 50
第5章 经济性与环保性分析 51
5.1经济性分析 51
5.2环保性分析 51
参考文献 52
致谢 53
第1章 绪论
1.1桥式抓斗卸船机
桥式抓斗卸船机是当今港口散料货物装卸的主要设备,被广泛应用于各大港口码头,其位于港口装卸工艺的最前端。桥式抓斗卸船机作为卸船作业中的重要设备,技术成熟可靠,卸船速度快,工作效率高,动作机动灵活,受海浪影响不明显,维护简单等优点突出,已经成为目前世界上使用最广泛的散料货物卸船机械之一。
桥式抓斗卸船机一般由抓斗起升机构、抓斗开闭机构、小车运行机构、悬臂俯仰机构、供料系统、回收装置、物料输送切换装置、卸料称重装置、自行式司机室、机器房、电气室、电气控制系统、防风装置、悬臂固定装置及金属结构等主要部件组成。桥式抓斗卸船机根据作业形式和构造形式分为自行小车式、半牵引小车式、牵引小车式。
本次卸船机的设计采用牵引式小车,这种设计是将卸船机的抓斗起升机构、抓斗闭合机构和小车运行机构以及电器设备等全部安装在桥架上的机器房内。钢丝绳通过一些导向滑轮来牵引小车使其实现在前大梁上的运动。在这种形式下,可以将小车设计的较轻,而且不必设置动力机构,只需将控制抓斗起升动作和闭合动作的钢丝绳卷绕在起升机构和闭合机构的钢丝绳卷筒上,再通过导向滑轮连接在小车上。只通过钢丝绳的牵引来使小车运动,必须设置合理的钢丝绳缠绕方式,可以使小车在抓斗起升机构和抓斗闭合机构没有动作的情况下运行时,抓斗要沿着前大梁的方向进行水平移动。根据钢丝绳缠绕方式的不同设计了带平衡小车的双小车和不带平衡小车的机械差动四卷筒简单小车方式。
在2000年以后,随着技术的发展,我国的大型卸船机技术与国外的差距已经很小,有相当多的大型卸船机由国内机构或企业自行设计、制造、调试,且国产的卸船机已经能够被绝大部分的用户认可,国内卸船机的性能已能完全满足用户的不同需求。我国每年都要出口很多的大型港口卸船机设备,前景广阔。
综合前述,桥式抓斗卸船机具有广泛的应用和发展前景,无论是企业,还是研究机构,都应该高度重视卸船机的发展问题,要对卸船机技术进行不断更新和完善,只有这样才能使其能满足社会经济高速发展对于港口运输的需求,才能更好促进港口机械行业的繁荣发展。
1.2 Solidworks三维建模
三维设计技术是计算机辅助设计(CAD)中的一项重要技术。该技术是将物体的形状等属性存储于计算机中,利用计算机的计算能力生成物体的三维几何模型,使得该物体在设计制造过程中能够被更直观、形象、清楚地表达。将物体特征所包含的数据通过计算机的处理和控制而得到物体几何实体就是三维建模的核心。
目前的三维软件种类很多,但是他们的建模原理都是相似的。Solidworks是一款经典的三维建模软件,对它的熟练应用是对每个机械行业技术人员的必备要求。随着计算机技术的快速发展和三维建模软件的不断优化,该技术在机械设计、制造领域发挥着越来越重要的作用。
第2章 总体轮压及抗倾覆稳定性计算
2.1总体轮压计算
起重机轮压是指起重机的车轮对轨道的垂直压力。起重机的总体轮压计算在起重机的设计、使用、制造等各个方面都有重要意义。首先,最大轮压应满足基础的承载要求,相反,基础的建设也要依据最大轮压。其次,最大轮压为运行机构部件以及金属结构提供计算条件,为车轮装置和轨道支承结构的设计提原始数据。最小轮压主要用于运行机构在起动和制动时的车轮打滑验算。
起重机上作用的各种载荷是通过行走支承装置和车轮然后传递到基础上,桥式起重机总体轮压计算实际上就是计算这些支点所承受的基础的垂直支承反力。桥式起重机通常在每个支点会设置多个车轮,利用均衡梁将压力平均到每个车轮。桥式起重机采用四点支承式的矩形结构,这种结构的轮压是超静定的,且该结构具有良好的对称性、工艺性和稳定性。鉴于这种特点,轮压的计算可采用近似解法。
2.1.1重力(垂直)载荷产生的轮压计算原理
重力(垂直)载荷主要包括起重机自重载荷和货物载荷,此类载荷直接通过车轮作用在轨道上,轨道则产生相应的支承反力,产生轮压。由于起重机结构特性,可近似将起重机的所有车轮根据所处不同轨道,分为两组,分别为海侧车轮和陆侧车轮,这样可以进一步近似认为同侧车轮所承受的由重力载荷产生的轮压相同;同时,由于起重机各部分零部件数量众多,可将各部分重力矩相互叠加,得到整体重力矩。即
(2.1)
式中:
:整体重力矩;
:各零部件重量;
:零部件距指定轴的距离;
:整体在某位置的重力分布;
:对应位置距指定轴的距离。
对卸船机作如下简化:
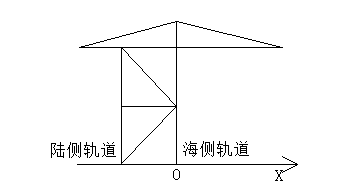
图2.1 卸船机简化图
如图2.1建立坐标系,以海侧轨道所在位置为坐标原点,陆侧向海侧方向为X正方向。
将所有零部件重力对海侧轨道位置处(o点)取重力矩,有
(2.2)
:零部件重量;
:零部件距海侧轨道的水平距离;
:整体在陆侧轨道位置的重力分布;
:对应位置距指定轴的距离,此时就是轨距,为26m。
由陆侧轨道承受,并产生等大垂直反力来平衡此重力矩,从而产生轮压,即
(2.3)
P:陆侧车轮轮压;
N:陆侧车轮数量,本设计取初始值N=24。
则
同理,求海侧车轮轮压时,如图2.2建立坐标系,以陆侧轨道所在位置为坐标原点,陆侧向海侧方向为X正方向。将所有零部件重力对陆侧轨道位置处(o点)取重力矩,有
(2.4)
:零部件重量;
:零部件距陆侧轨道的水平距离;
:整体在海侧轨道位置的重力分布;
:对应位置距指定轴的距离,此时就是轨距。
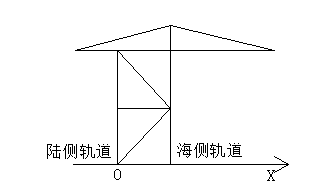
图2.2卸船机简化图
由海侧轨道承受,并产生等大垂直反力来平衡此重力矩,从而产生轮压,即
Q:海侧车轮轮压;
N:海侧车轮数量,取初始N=24。
则
2.1.2重力载荷在不同工况下的重力矩计算
卸船机构件由于自身重力载荷将在两条轨道处产生重力矩,以下对卸船机各部分构件分别加以计算。
2.1.2.1金属结构部分
卸船机金属结构部分包括门框结构、金属结构固定部分和整机固定部分,分别列于下列表格。
表2.1门框结构
序号 | 名称 | G(t) | H(m) | G*H(t.m) | Xw(m) | G*Xw(t.m) | Xl(m) | G*Xl(t.m) |
1 | 陆侧上横梁 | 45.5 | 45.8 | 2083.9 | -28 | -1274 | -2 | -91 |
2 | 海陆侧下横梁 | 56 | 5.6 | 313.6 | -13 | -728 | 13 | 728 |
3 | 海侧立柱 | 80.5 | 25.5 | 2052.75 | 0 | 0 | 26 | 2093 |
4 | 陆侧立柱 | 82.6 | 25.5 | 2106.3 | -26 | -2147.6 | 0 | 0 |
5 | 海侧上横梁 | 43.6 | 45.7 | 1992.52 | 0 | 0 | 26 | 1133.6 |
6 | 门框斜撑 | 25.2 | 32.8 | 826.56 | -13 | -327.6 | 13 | 327.6 |
7 | 门框水平撑杆 | 18.6 | 43.5 | 809.1 | -13 | -241.8 | 13 | 241.8 |
8 | 海陆侧联系横梁 | 48.8 | 16.4 | 800.32 | -13 | -634.4 | 13 | 634.4 |
9 | 分叉漏斗梁 | 17.8 | 12.5 | 222.5 | -6.3 | -112.14 | 19.7 | 350.66 |
10 | 料斗后梁 | 12.5 | 20.5 | 256.25 | 10.7 | -133.75 | 15.3 | 191.25 |
11 | 海陆侧斜杆及料斗前 | 18.5 | 16.5 | 305.25 | -13 | -240.5 | 13 | 240.5 |
12 | H型梁 | 22.5 | 46.3 | 1041.75 | -15 | -337.5 | 11 | 247.5 |
13 | 门框梯子 | 1.26 | 15 | 18.9 | -25 | -31.5 | 1 | 1.26 |
14 | 合计 | 473.36 | 27.10 | 12829.7 | -13.11 | -6208.79 | 12.88 | 6098.57 |
表2.2 金属结构固定部分
序号 | 名称 | G(t) | H(m) | G*H(t.m) | Xw(m) | G*Xw(t.m) | Xl(m) | G*Xl(t.m) |
1 | 门框结构 | 473.36 | 27.10 | 12829.7 | -13.11 | -6208.79 | 12.88 | 6098.57 |
2 | 海侧梯形架 | 36.8 | 56 | 2060.8 | 0.5 | 18.4 | 26.5 | 975.2 |
3 | 后大梁 | 165.6 | 40.8 | 6756.48 | -23.5 | -3891.6 | 2.5 | 414 |
4 | 托缆轨道 | 12.5 | 39.2 | 490 | -19.5 | -243.75 | 6.5 | 81.25 |
5 | 漏斗 | 170 | 16.5 | 2805 | -6.3 | -1071 | 19.7 | 3349 |
6 | 机房底架 | 63.5 | 48 | 3048 | -26.9 | -1708.15 | -0.9 | -57.15 |
7 | 销轴及联接 | 5.3 | 42 | 222.6 | 2.2 | 11.66 | 28.2 | 149.46 |
8 | 海侧梯形后拉杆 | 22.5 | 59.6 | 1341 | -13 | -292.5 | 13 | 292.5 |
9 | 锚定装置 | 5.7 | 3 | 17.1 | -13 | -74.1 | 13 | 74.1 |
10 | 后大梁小车轨道 | 7.5 | 41.7 | 312.75 | -18.5 | -138.75 | 7.5 | 56.25 |
11 | 合计 | 962.76 | 31.03933 | 29883.43 | -14.1246 | -13598.58 | 11.87 | 11433.18 |
表2.3 整机固定部分
序号 | 名称 | G(t) | H(m) | G*H(t.m) | Xw(m) | G*Xw(t.m) | Xl(m) | G*Xl(t.m) |
1 | 金属结构固定部分 | 962.76 | 31.03933 | 29883.43 | -14.124 | -13598.58 | 11.87 | 11433.18 |
2 | 机器房总成 | 48.2 | 48.5 | 2337.7 | -26 | -1253.2 | 0 | 0 |
3 | 起升/开闭/小车机构 | 148 | 49.2 | 7281.6 | -27.5 | -4070 | -1.5 | -222 |
4 | 俯仰机构 | 46.2 | 49 | 2263.8 | -21 | -970.2 | 5 | 231 |
5 | 电气总成 | 20 | 50 | 1000 | -32 | -640 | -6 | -120 |
6 | 大车行走 | 230 | 2 | 460 | -13 | -2990 | 13 | 2990 |
7 | 梯子 | 40.7 | 30 | 1221 | -26 | 1058.2 | 0 | 0 |
8 | 电梯 | 8.2 | 10 | 82 | -26 | -213.2 | 0 | 0 |
9 | 电缆卷筒 | 10.8 | 22 | 237.6 | -18.5 | -199.8 | 7.5 | 81 |
10 | 安全钩 | 4.36 | 63.4 | 276.424 | 0 | 0 | 26 | 113.36 |
11 | 梯形架滑轮 | 8 | 64.5 | 516 | 0 | 0 | 26 | 208 |
12 | 张紧装置 | 8 | 41.2 | 329.6 | -37.5 | -300 | -11.5 | -92 |
13 | 铭牌 | 0.4 | 18 | 7.2 | -13 | -5.2 | 13 | 5.2 |
14 | 其它 | 30 | 15 | 450 | -13 | -390 | 13 | 390 |
15 | 俯仰控制室 | 1.2 | 48 | 57.6 | 0 | 0 | 26 | 31.2 |
16 | 合计 | 1566.82 | 29.61 | 46403.95 | -16.39 | -25688.38 | 9.60 | 15048.94 |
2.1.2.2前大梁总成
前大梁在水平和仰起状态下将产生不同的重力矩,见表2.4、表2.5.
表2.4前大梁水平
No. | 名称 | G(t) | H(m) | G*H(t.m) | Xw(m) | G*Xw(t.m) | Xl(m) | G*Xl(t.m) |
1 | 前大梁 | 178.7 | 40.8 | 7290.96 | 30.6 | 5468.22 | 56.6 | 10114.42 |
2 | 梯子 | 6 | 41.5 | 249 | 23 | 138 | 49 | 294 |
3 | 小车轨道 | 8 | 41.7 | 333.6 | 30.2 | 241.6 | 56.2 | 449.6 |
4 | 前大拉杆 | 25 | 55 | 1375 | 20 | 500 | 46 | 1150 |
5 | 俯仰滑轮 | 4 | 42.6 | 170.4 | 37 | 148 | 63 | 252 |
6 | 头部滑轮 | 3 | 44.2 | 132.6 | 58 | 174 | 84 | 252 |
7 | 其它 | 5 | 35 | 175 | 44 | 220 | 70 | 350 |
8 | 合计 | 229.7 | 42.34 | 9726.56 | 29.99 | 6889.82 | 55.99 | 12862.02 |
表2.5前大梁仰起
No. | 名称 | G(t) | H(m) | G*H(t.m) | Xw(m) | G*Xw(t.m) | Xl(m) | G*Xl(t.m) |
1 | 前大梁 | 178.7 | 64 | 11436.8 | 5 | 893.5 | 31 | 5539.7 |
2 | 梯子 | 6 | 62 | 372 | 4.2 | 25.2 | 30.2 | 181.2 |
3 | 小车轨道 | 8 | 63 | 504 | 4.25 | 34 | 30.25 | 242 |
4 | 前大拉杆 | 25 | 52 | 1300 | 0.8 | 20 | 26.8 | 670 |
5 | 俯仰滑轮 | 4 | 75.6 | 302.4 | 7.2 | 28.8 | 33.2 | 132.8 |
6 | 头部滑轮 | 3 | 96 | 288 | 9.2 | 27.6 | 35.2 | 105.6 |
7 | 其它 | 5 | 65 | 325 | 2 | 10 | 28 | 140 |
8 | 合计 | 229.7 | 63.24 | 14528.2 | 4.52 | 1039.1 | 30.52 | 7011.3 |
2.1.2.3整机重力载荷及产生轮压
将整机固定部分的重力矩与前大梁的重力矩组合,得到整机重力矩。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: