MQ4033门座起重机总体及臂架系统设计毕业论文
2020-02-19 19:20:11
摘 要
论文主要完成了MQ4033门座起重机的总体设计和臂架系统及其平衡系统设计。总体设计的主要内容有确定门机主要工作机构和金属结构的形式,作用在门机上的主要载荷计算,轮压计算以及抗倾覆稳定性计算。臂架系统及其平衡系统设计的主要内容有确定四连杆组合臂架及其平衡系统的几何尺寸,对臂架系统进行受力计算,构建臂架系统及其平衡系统的三维模型。
在总体设计中,自重载荷和风载荷的计算是一个重点,利用Excel表格能够快速完成门机自重重心的计算和风力作用位置的计算。在臂架系统及其平衡系统的设计中,采用图解法求解四连杆组合臂架及其平衡系统的几何尺寸时,为了获得满意的结果,需要反复调整数据重新作图。利用三维建模软件SolidWorks构建臂架系统及其平衡系统的三维模型,使其各组成构件装配关系能更加直观的表现出来。
关键词:门座起重机;总体设计;臂架系统;臂架平衡系统;三维建模
Abstract
The thesis mainly completed the overall design of MQ4033 portal crane and the design of boom system and its balance system. The main contents of the overall design include determining the main working mechanism and metal structure of the door machine, calculating the main load acting on the door machine, calculating the wheel pressure and calculating the anti-overturning stability. The main contents of the design of the boom system and its balance system include determining the geometric dimensions of the four-link combined boom and its balance system, calculating the force on the boom system, and constructing the three-dimensional model of the boom system and its balance system.
In the overall design, the calculation of self-weight load and wind load is an important point, and the calculation of gravity center of door machine and the calculation of wind action position can be completed quickly by using Excel. In the design of the arm support system and its balance system, when the geometric dimensions of the four-link combined arm support and its balance system are solved by graphic method, in order to obtain satisfactory results, the data need to be adjusted repeatedly and redrawn. The three-dimensional modeling software SolidWorks is used to build the three-dimensional model of the arm support system and its balance system, so that the assembly relations of its components can be more intuitively expressed.
Key Words: portal crane; overall design; boom system; boom balancing system; three-dimensional modeling
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 课题研究目的和意义 1
1.2 研究现状 1
1.3 课题研究内容 2
第2章 MQ4033门座起重机总体设计 3
2.1 门机设计参数 3
2.2 确定门机主要工作机构和金属结构形式 4
2.2.1 确定门机主要工作机构形式 4
2.2.2 确定门机金属结构形式 7
2.3 载荷计算 9
2.3.1 自重载荷 9
2.3.2 起升载荷 12
2.3.3 动载荷 12
2.3.4 货物偏摆载荷 13
2.3.5 风载荷 14
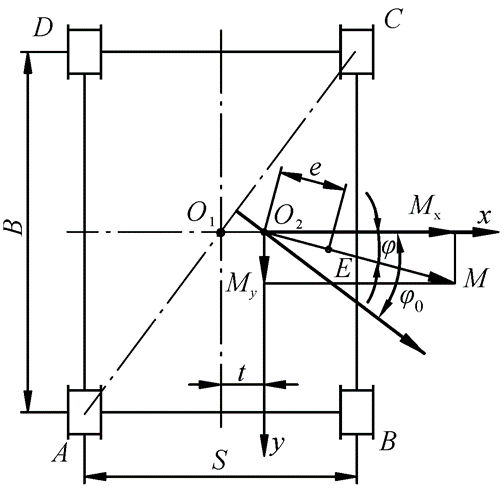
2.4 轮压计算 19
2.5 整机抗倾覆稳定性计算 22
2.5.1 无风静载工况 22
2.5.2 有风动载工况 23
2.5.3 突然卸载或吊具脱落工况 24
2.5.4 非工作状态暴风侵袭工况 25
第3章 MQ4033门座起重机臂架及其平衡系统设计 27
3.1 臂架系统设计 27
3.1.1 确定臂架系统尺寸 27
3.1.2 货物水平性校验 29
3.2 臂架平衡系统设计 34
3.2.1 确定平衡系统尺寸及平衡重量 34
3.2.2 臂架自重平衡校验 35
3.3 臂架系统各铰点力计算 37
3.3.1 计算最大幅度铰点力 38
3.3.2 计算最小幅度铰点力 43
3.4 三维建模 48
3.4.1 创建模型 48
3.4.2 创建装配体 51
3.4.3 臂架系统及其平衡系统运动仿真 52
第4章 总结与分析 53
4.1 全文总结 53
4.2 经济性和环保性分析 54
参考文献 55
致谢 56
第1章 绪论
1.1 课题研究目的和意义
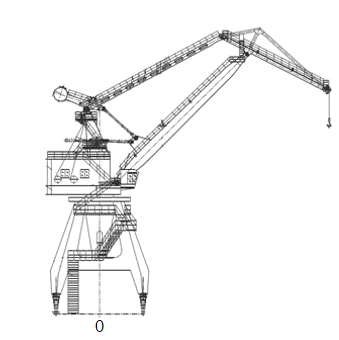
现如今,随着经济建设的快速发展,越来越多的行业要求实现生产过程的智能化和自动化,起重机在其中扮演着重要的角色,所以,如何实现对现有起重机的突破性创新,使其符合当代社会的发展需要,正成为一个亟需解决的难题。起重机在国民经济中应用广泛,港口装卸作业、建造高层建筑、建造大型船只、发射火箭和导弹、建造和安装大型发电站等,都离不开起重机作业。作为物料搬运机械中最通用的一种设备,与其它类型的起重机相比,门座起重机具有起重量大、作业空间大、货场面积利用率高、装卸效率高、基建投资少和运行成本低等众多优点,这些优点使得它在港口、码头获得了广泛的应用。臂架系统是门座起重机的主要受力部件,它通过起升机构将重物提升或下降至一定的高度,通过变幅机构改变臂架的工作仰角以增大作业范围。作为门座起重机的核心部件,臂架系统设计的好坏将直接影响整机的性能。因此,在门座起重机的设计过程中,优秀的臂架系统设计可以节约变幅驱动功率,提高整机工作性能,延长其使用寿命,具有重要的理论意义和现实意义。
1.2 研究现状
随着世界经济的不断发展和国际物流业的日益繁荣,港口物流对起重机装卸货物的效率、使用的安全可靠性等工作性能提出了更高的要求。因此,对起重机各方面的研究一直是国内外的热点。
门座起重机由于其高效、灵活和通用性,已被广泛应用于港口和码头。四连杆铰接式组合臂架变幅系统是目前应用较广泛的门座起重机臂架形式。合理的变幅系统设计不仅可以降低变幅机构的驱动功耗,还可以提高机构的运行性能。为此,林健民、夏鹏[1]等通过对四连杆门座起重机臂架系统设计原理的分析,探讨了在变幅过程中保证货物沿水平线轨迹运动的优化方法。
如今,起重机在现代工业中的应用越来越广泛,其功能也越来越强大,与此同时,对起重机的要求也越来越高。因此,起重机的设计方法需要不断改进和提高,从而使设计的起重机能够更加满足实际需要。须雷[2]通过总结国内外起重机设计的实例,分析并总结了起重机各种现代设计方法的基本原理;Haiwei Liu, Weijian Mi[3]等基于一个真实的门式起重机,通过仿真软件建立了机械模型、电机模型和控制模型,然后将这三个模型集成到整个仿真平台中,通过模拟港口起重机的吊装和变幅操作,分析吊装和变幅过程中的功率变化和能耗,为节能研究提供了基础,具有很强的现实意义;Yingguang Chu, Lars Ivar Hatledal[4]等也做过类似的仿真研究。
智能化与自动化的结合是当代起重机技术发展的一大趋势,相关方面的研究也在如火如荼地进行。韩翠英、刘占仓[5]对起重机自动化技术的发展发表了自己的看法。他们认为,我们必须坚定不移地走促进自动化技术广泛应用的道路,以刺激起重机向智能化和自动化方向发展;秦长海[6]设计了一种采用机器视觉定位的方法,用来检测提升物体的大小、重量和周围环境。这种方法的原理是通过在起重机吊钩上加装CCD,从而可以使用机器视觉定位,然后在地面上使用微型计算机控制起重机的运行。此项设计在起重机做一些高风险、高精度的吊装工作时,可以保证工作人员的安全和施工的顺利进行。
安全是起重机设计的永恒主题。起重机在当前工程建设中发挥着越来越重要的作用,其运行安全对工程建设和施工人员都有重大影响,因此有必要做好起重机的安全控制工作。丁冲、贾磊[7]等设计开发了门机安全监控系统,用以提高其运行的安全性和可靠性;丁东方[8]通过门机的静态和动态应力测试完成了整机的安全性性能评估,并可以根据测试结果提出相应的改进方案;赵博[9]在全面分析了起重机安全装置的现状和未来发展后指出,为了提高起重机运行的安全性,有必要加强安全装置的分析和优化。
最后,Brkic VKS, Klarin MM[10]等对起重机舱室内部的人机工程学设计进行了研究。毫无疑问,起重机舱室内部的人机工程学设计同样十分重要,因为起重机最终是要面向用户的,用户的体验对起重机的安全运行起着至关重要的作用。所以,从这个方面考虑,这也是提高起重机安全性的途径之一。
1.3 课题研究内容
本课题研究的主要内容有MQ4033门座起重机的总体设计和臂架系统及其平衡系统设计。在总体设计部分,首先根据设计参数确定门机主要工作机构和金属结构的形式,然后计算作用在门机上的各种载荷,包括自重载荷、风载荷等,紧接着对门机进行轮压和抗倾覆稳定性计算,以确保设计的合理性。在臂架系统及其平衡系统设计部分,主要完成的工作有刚性四连杆组合臂架方案的设计和杠杆-活对重法臂架自重平衡系统的设计,并用作图法对臂架系统及其平衡系统进行受力分析,求出各铰点的力,最后运用三维建模软件SolidWorks构件臂架系统及其平衡系统的三维模型。
第2章 MQ4033门座起重机总体设计
2.1 门机设计参数
本次设计的MQ4033门座起重机主要的设计参数见表2.1。
表2.1 设计参数
项目名称 | 性能参数 |
起重量 | 40t(吊具3t) |
工作幅度 | 最大幅度:33m |
最小幅度:10m | |
起升高度 | 轨上:28m |
轨下:15m | |
机构工作速度 | 起升机构:20m/min |
变幅机构:25m/min | |
回转机构:1r/min | |
运行机构:26m/min | |
机构工作级别 | 整机:A7 |
起升机构:M7 | |
变幅机构:M7 | |
回转机构:M7 | |
运行机构:M4 | |
轨距/基距 | 11/12m |
工作状态最大风压 | 250N/m2 |
非工作状态最大风压 | 1560N/m2 |
许用轮压 | 250KN |
轨道型号 | P50 |
最大尾部回转半径 | 8m |
电源 | 380V/50Hz |
2.2 确定门机主要工作机构和金属结构形式
门座起重机主要有四大工作机构,它们分别是起升机构、变幅机构、回转机构和运行机构;门座起重机的金属结构主要有下面几种,它们分别是臂架系统、人字架与回转平台、机器房、司机室和圆筒门架等。
2.2.1 确定门机主要工作机构形式
- 起升机构
起升机构是用于提升和降低货物的工作机构。它是起重机械不可缺少的一部分,也是起重机中最基本、最重要的机构。起升机构通常由驱动装置、传动装置、制动装置、卷绕系统、卷绕装置和安全辅助装置等组成。
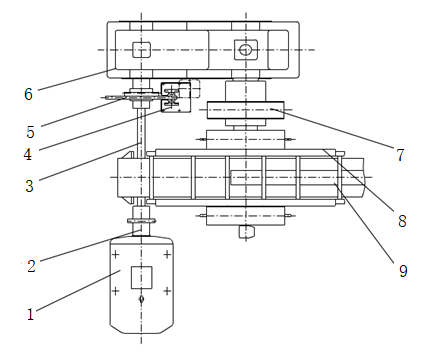
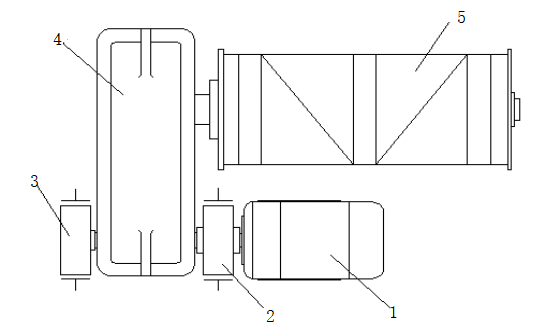 起升机构的总体布置在很大程度上取决于其驱动装置的形式。本此设计采用电机分别驱动形式的驱动装置,每个机构都由一个独立的电机驱动,如此分组性好,布局、安装和维护更加方便,控制系统简单。电机与卷筒并排设置,电机通过标准减速器驱动卷筒转动,其布置形式如图2.1所示。
起升机构的总体布置在很大程度上取决于其驱动装置的形式。本此设计采用电机分别驱动形式的驱动装置,每个机构都由一个独立的电机驱动,如此分组性好,布局、安装和维护更加方便,控制系统简单。电机与卷筒并排设置,电机通过标准减速器驱动卷筒转动,其布置形式如图2.1所示。
图2.1 起升驱动装置
1-电动机;2-联轴器;3-制动器;4-减速器;5-双联卷筒。
电机输出的扭矩被减速器放大,带动卷筒转动,使钢丝绳缠绕在卷筒上或从卷筒上松开,从而吊具可以升降,实现货物的升降动作。卷轴的正向和反向旋转是通过改变电动机的转向来实现的,而起升机构运动的停止或使起吊的货物停止在在空中某位置是依靠制动装置来实现的。
起升机构的钢丝绳卷绕系统是起升机构传动装置的一部分,并起到转换运动形式的作用。本次设计采用的起升钢丝绳卷绕系统形式如图2.2所示。
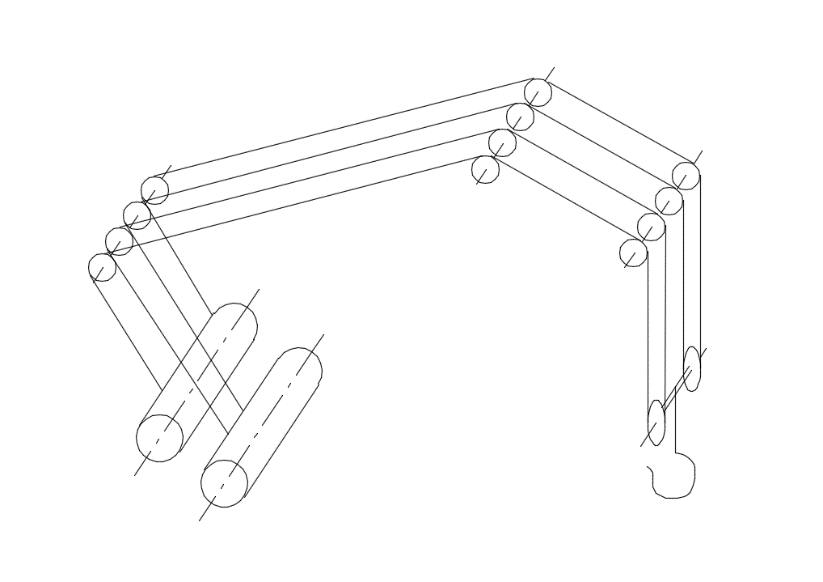 图2.2 起升钢丝绳卷绕系统
图2.2 起升钢丝绳卷绕系统
- 变幅机构
 变幅机构可以改变取物装置的位置,其主要由臂架及其平衡系统和变幅驱动装置组成。变幅机构的作用主要有以下两点:通过改变幅度以扩大起重机的作业范围;通过改变幅度以调整起重机的起重能力和提高起重机的利用程度。本次设计采用具有补偿系统的四连杆组合臂架方案,齿条式变幅驱动机构。具有货物升降补偿系统和臂架自重平衡系统的变幅机构可以使取物装置及其所载货物和臂架系统的重心在变幅过程中沿着水平线或接近于水平线的轨迹移动,从而可以减小在变幅过程中由于起升载荷和臂架系统自重产生的势能变化而引起的变幅阻力,进而可以大大减小变幅机构的驱动功率消耗。变幅驱动装置的形式如图2.3所示。
变幅机构可以改变取物装置的位置,其主要由臂架及其平衡系统和变幅驱动装置组成。变幅机构的作用主要有以下两点:通过改变幅度以扩大起重机的作业范围;通过改变幅度以调整起重机的起重能力和提高起重机的利用程度。本次设计采用具有补偿系统的四连杆组合臂架方案,齿条式变幅驱动机构。具有货物升降补偿系统和臂架自重平衡系统的变幅机构可以使取物装置及其所载货物和臂架系统的重心在变幅过程中沿着水平线或接近于水平线的轨迹移动,从而可以减小在变幅过程中由于起升载荷和臂架系统自重产生的势能变化而引起的变幅阻力,进而可以大大减小变幅机构的驱动功率消耗。变幅驱动装置的形式如图2.3所示。
图2.3 变幅驱动装置
1-变频电机;2-高速轴齿形联轴器;3-浮动轴;4-盘式制动器;5-高速轴带制动盘联轴器;6-减速器;7-低速轴齿形联轴器;8-齿条支承摇架;9-齿条。
- 回转机构
回转机构的作用是使起重机的回转部分作回转运动,以达到在水平面上运输货物的目的。回转机构是回转式起重机的主要工作机构之一。回转机构主要由回转支承装置和回转驱动装置两大部分组成。
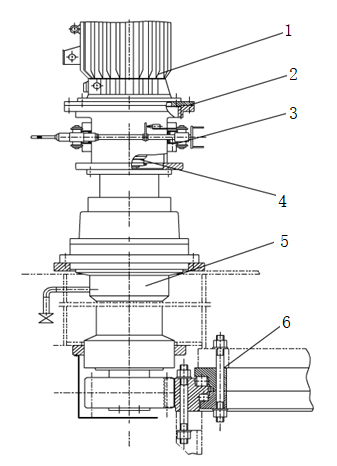 回转支承装置的主要作用是将回转部分支撑在固定机架上,以便不会掉落或翻倒,并起到定心作用,以确保回转部分具有确定的运动。回转支承装置可分为柱式回转支承装置和转盘式回转支承装置,本次设计采用的是转盘式回转支承装置。转盘式回转支承装置的特点是没有特别高的立柱,起重机的回转部分安装在大转盘上,转盘由滚动体支撑在固定基础上,转盘和回转部分一起回转。回转机构的结构形式如图2.4所示,回转机构的俯视图如图2.5所示。
回转支承装置的主要作用是将回转部分支撑在固定机架上,以便不会掉落或翻倒,并起到定心作用,以确保回转部分具有确定的运动。回转支承装置可分为柱式回转支承装置和转盘式回转支承装置,本次设计采用的是转盘式回转支承装置。转盘式回转支承装置的特点是没有特别高的立柱,起重机的回转部分安装在大转盘上,转盘由滚动体支撑在固定基础上,转盘和回转部分一起回转。回转机构的结构形式如图2.4所示,回转机构的俯视图如图2.5所示。
图2.4 回转机构
1-电机;2-上箱体;3-制动器;4-极限力矩联轴器;5-减速器;6-回转支承。
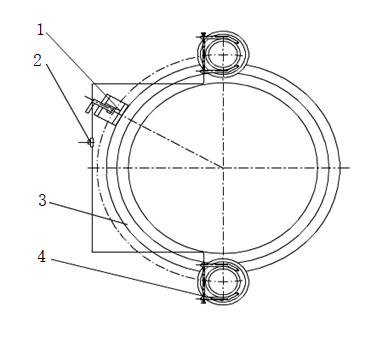 图2.5 回转机构俯视图
图2.5 回转机构俯视图
1-锁定装置;2-制动操作系统;3-回转支承;4-回转驱动。
- 运行机构
本次设计的运行机构由四条支腿分别驱动,每条腿有两个独立的驱动装置。每个驱动装置由三合一减速器、开式齿轮传动装置、车轮组、大均衡梁和小均衡梁等组成。减速电机通过开式齿轮传动来驱动车轮滚动。每条腿上有9个轮子,轮子总数为36个,其中驱动轮数为18个;轨道采用P50。运行机构的结构简图如图2.6所示。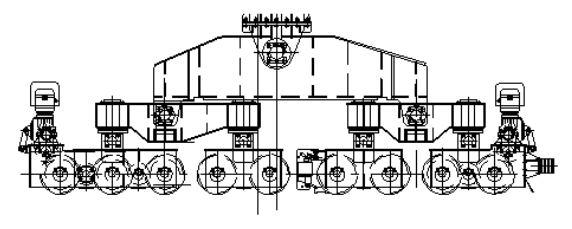
图2.6 运行机构
2.2.2 确定门机金属结构形式
起重机的金属结构是整个起重机的支撑结构,决定着起重机械的结构,它用于装置起重机的机械和电气设备,支撑被吊重物,承受和传递作用在起重机上的各种载荷。
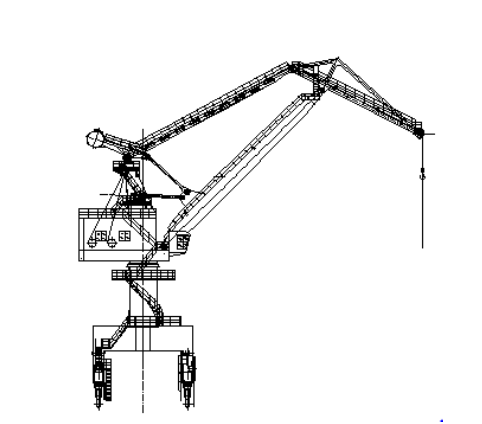
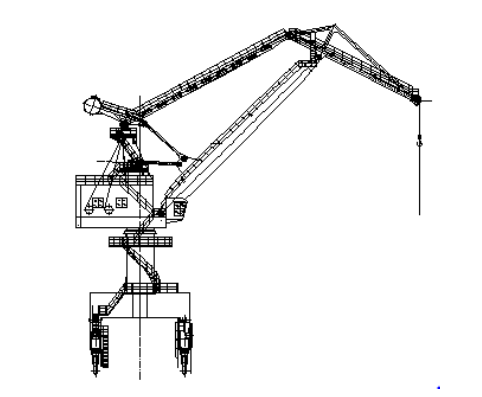
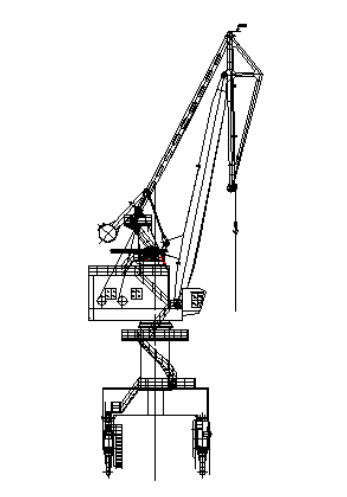
- 门机的臂架系统
臂架是能够承受和传递起重载荷的主要部件,要求其具有足够的强度、刚度和稳定性,并考虑起重机自身的重量、稳定性和整体性能。本次设计机型为四连杆组合臂架结构起重机,主臂架采用箱型结构,制造简单。
- 门机的人字架与回转平台
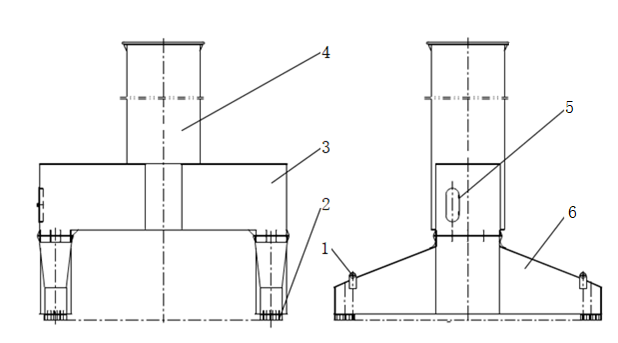
本次的人字架设计采用框架式结构,人字架上部为箱形上梁,上横梁上有多个支撑刚性拉杆的支座;人字架中部安装在横梁构成的平台上的变幅机构主要承受变幅机构的重力和齿条力。人字架的根部通过法兰连接到立柱上,上部载荷通过立柱传递到转台上。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: