复合材料自动卸料机械手的设计毕业论文
2020-04-12 16:53:02
摘 要
近年来在工业生产中,工业生产的自动化成为人们关注的重点。随着我国工业现代化的不断发展,机械自动化已经成为各类企业中的重要方向。同时在生产中,人们可能会受到高温、高压及放射性物质等情况的危害,在这些复杂的生产环境不适合我们手动亲自进行操作。因此机械手应运而生,由各种工业材料制成的机械手,可以适应生产现场的恶劣环境,有效的代替了人力进行操作,降低了工人的劳动强度,同时也提高了生产效率。
本机械手为自动卸料机械手,用于对玻镁板等板类材料进行直线搬运,并由此设计了机械手气吸附式的手部结构。采用桁架支撑的滚动导轨来完成机械手的水平移动,并利用齿轮齿条进行驱动;而臂部采用气缸来进行手臂的伸缩从而完成机械手的上下移动。
控制部分采用PLC可编程控制器来完成机器人的自动化工作流程,在此基础上对电气回路进行了设计,并分为手动,自动,单步,单周期等操作。当机械手的工作流程或运动范围需要改变时,只需修改可编程控制器的控制程序即可解决,具有很强的适应性和通用性。
关键词:自动化;机械手;卸料;PLC控制
Abstract
In recent years, automation in industrial production has become the focus of attention in industrial production. With the continuous development of China's industrial modernization, mechanical automation has become an important direction for all kinds of enterprises. At the same time, in production, people may be affected by the conditions of high temperature, high pressure and radioactive material. In these complex production environment, it is not suitable for us to operate manually. Therefore, the manipulator came into being. The manipulator made from various industrial materials can adapt to the harsh environment of the production site, effectively replace the human operation, reduce the labor intensity of the workers, and also improve the production efficiency.
The manipulator is an automatic unloading manipulator, which is used for rectilinear transportation of plate materials, such as glass and magnesium plates, and the mechanical hand adsorption type hand structure is designed. The rolling guideway supported by the truss is used to complete the horizontal movement of the manipulator and drive with the gear rack, while the arm uses the cylinder to stretch the arm so that the manipulator moves up and down.
The control part uses PLC programmable controller to complete the automation work flow of the robot. On this basis, the electrical circuit is designed and divided into manual, automatic, single, single cycle and other operations. When the working process or motion range of the manipulator needs to be changed, only the control program of the programmable controller can be modified. It has a strong adaptability and versatility.
Key Words:Automation; manipulator; unloading; PLC control
目录
第1章 绪论 1
1.1工业机械手概述 1
1.2工业机械手的组成 1
1.3工业机械手的分类 2
第2章 设计方案 3
2.1机械手的结构方案设计 3
2.2机械手的驱动方案设计 3
2.3机械手的控制方案设计 3
第3章 手部的设计 4
3.1真空泵 4
3.1.1真空泵的分类 4
3.1.3真空泵的选择 4
3.2真空吸盘 5
3.2.1真空吸盘的作用 5
3.2.2真空吸盘的材料 5
3.2.3真空吸盘的型号 5
3.2.4吸吊力的核算 6
第4章 臂部的设计 8
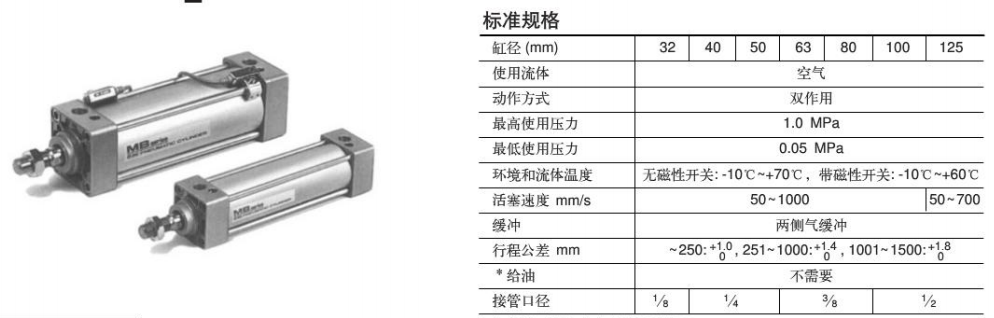
4.1气缸 8
4.1.1气缸的分类 8
4.1.2双作用气缸工作原理 8
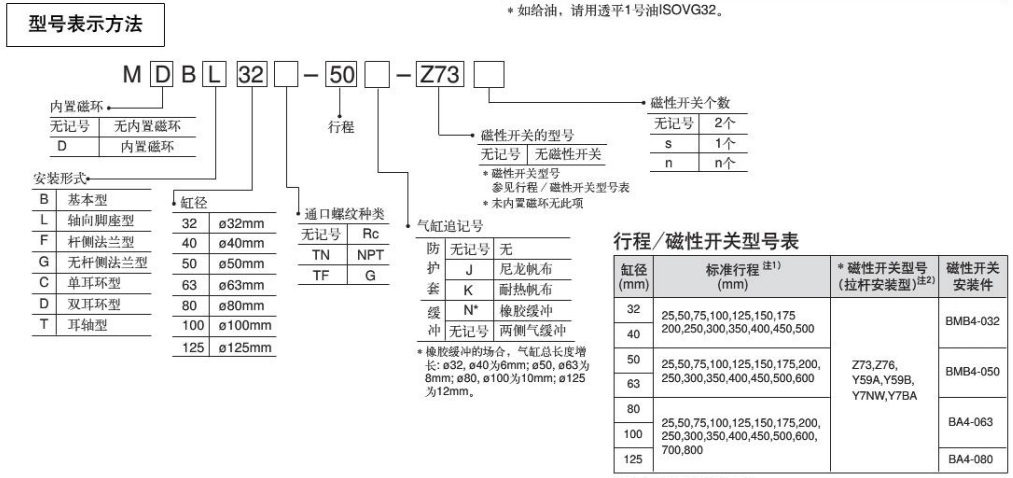
4.1.3气缸尺寸 8
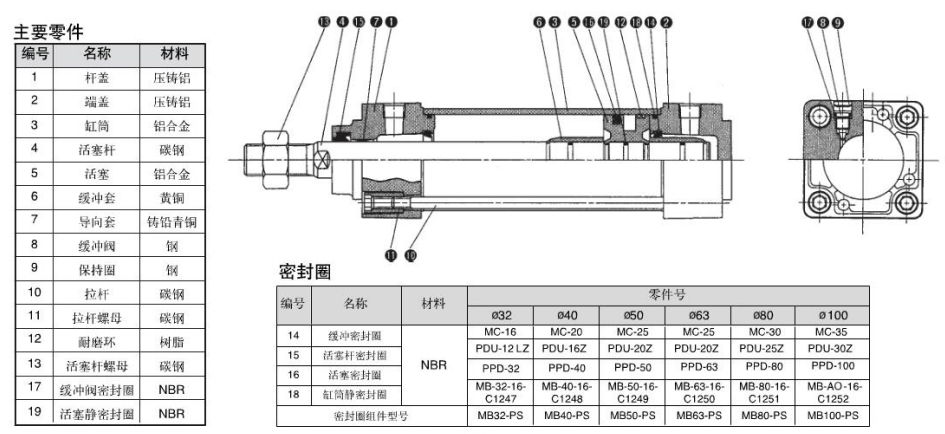
4.1.4气缸结构设计 9
4.1.5导向装置 11
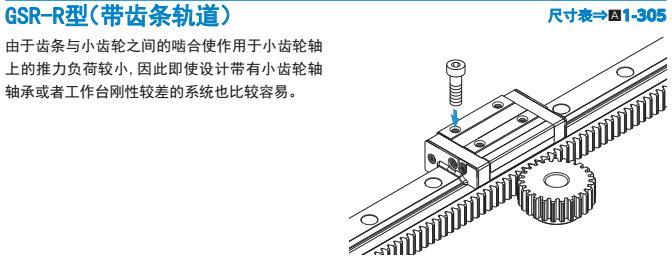
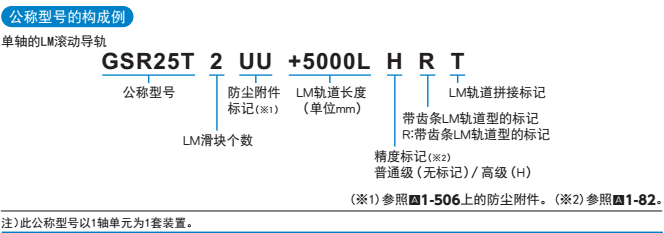
4.2滚动导轨 11
4.2.1导轨的作用 11
4.2.2滚动导轨的选择 11
第5章 气动系统设计 13
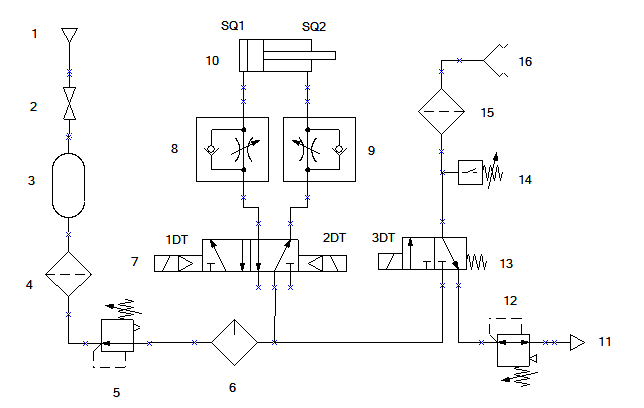
5.1动作过程 13
5.2气动驱动回路系统设计 13
第6章 PLC控制系统设计 15
6.1可编程控制器的型号选择和工作过程 15
6.1.1 可编程序控制器的型号选择 15
6.1.2 可编程序控制器的工作过程 15
6.2可编程序控制器的使用步骤 15
6.3 PLC控制方案 16
6.3.1控制系统的工作原理 16
6.3.2控制要求 16
6.3.3机械手工作流程 16
6.3.4 PLC I/0分配 17
6.4程序设计 17
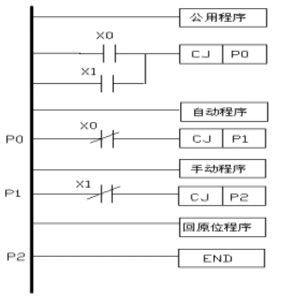
6.4.1程序的总体结构 17
6.4.2公用程序 18
6.4.3手动程序 19
6.4.4回原点程序 20
6.4.5自动程序 20
参考文献 24
致谢 26
第1章 绪论
1.1工业机械手概述
1920年,捷克作家卡雷尔在他的剧本中创造了一个机械仆人“Robota”,他具有主人的外表和行为,并且被用来为人类服务。这个机械仆人的名字就是现在为人所熟知的机器人。我们可以认为:机器人是一种机械装置,具有很灵活的动作功能,可以在三维空间中执行许多类似人类手臂及手部的抓取移动等动作。机器人是一种拟人化的机械装置,它集成了人的优越性和机器的优点,而不仅仅是简单地取代人的行为。它不仅具有人体对周围环境的快速反应和决策能力,而且还具有能够高精度地保持长期高效工作的这种机器的性能。在某种程度上可以认为它是机器不断进化而出现的产物,成为了生活中非常重要的服务装置,同时也是先进制造技术中非常关键的自动化装置。
机械手就是根据给定的条件,通过模拟我们的肢体及手部的动作,实现自动化的抓取和移动任务。由于在生产过程中使用机器人淘汰掉繁琐的人工操作,因此可以大大提高工业生产的自动化水平和生产力;同时,可以大量降低劳动工人的工作强度,提高生产的精确度和产品合格率。特别是在极低和极高的温度下、极低和极高的压力下、环境中含有粉尘或有毒气体时,机械手可以替代人们的正常工作,实现安全生产。故机器人近年来在机械制造领域内迅速发展,并有着广泛的实际应用。近年来,随着机器人领域越来越多地应用计算机技术、电气技术和传感器技术,又充分利用了可编程控制器灵活的自动控制能力,工业生产自动化则可以很容易地实现。
1.2工业机械手的组成
机械手主要由执行系统,驱动系统,控制系统和传感系统组成。
执行系统:执行系统是工业机器人对工件进行动作所需要的可以进行移动的机械部件,通常包括以下部分:(1)手部:直接与工件接触,可以对工件进行抓取搬运等操作,也可以执行焊接等不需移动工件的操作。(2)腕部:工业机械手中以连接手和手臂,并且调整手的工作朝向或者增加手臂的摆动角度和运动范围。而有一些专门的机器人没有手腕部件,正如本次设计所采用的,直接将手和手臂连接在一起。(3)臂部:由于手部的体积不大,能够工作的范围也较小,这就需要臂部来扩大机械手能够工作的范围和角度。(4)机身:承载着机械手及所持工件的重量,也可以在其上安装其他部件。
驱动系统:机械手的动力来源,机械手的各个执行系统均有一个驱动系统。根据不同的动力来源驱动系统可以分为四种类型:液压,气动,电气和机械方式。(1)液压式:该驱动系统由液压缸,电磁阀等组成。其驱动力较大而体积较小,耐冲击且动作平稳,但可能引起的漏油对液压系统的工作性能影响较大。(2)气压式:该驱动系统由气缸,电磁阀等组成。其特点有维护简单,气源方便,成本较小,防火防爆,而且泄漏对环境影响小。但其缺点也有动力较小、体积很大、速度不能准确控制、气缸动作不平稳带有冲击。(3)电气式:一般由电机驱动,电源方便、驱动力较大、反应较快,但必须使用减速装置(如齿轮减速器),需要使用步进电机、伺服电机等。(4)机械式:由连杆机构,凸轮机构组成,一般用于针对性强的机械手。
控制系统:控制系统的功能相当于大脑,通过驱动系统指挥着机械手的各步操作,能够使执行系统能够按照所要求的条件工作并确定正在进行的操作是否正确。电气和电子电路控制是比较常用的,目前的极限控制系统也在增加。
传感系统:一般分为内部和外部两部分模块,可以获取当前环境条件下需要的数据和信息。目前智能传感器在工业机器人领域的使用大大提高了机器人的适应能力和移动精确性能。
1.3工业机械手的分类
整体上分为专用型和通用型。(1)专用机械手:一般只有一个固定的程序,这个机器人大多是气动或液压的,结构相对简单而且价格便宜。(2)通用机械手即工业机器人,可根据具体的工作条件改变运行程序,有很强的通用性和适应性。
根据工业机械手载重量的大小又可以分为微型,小型,中型,大型,重型五种工业机械手。
第2章 设计方案
2.1机械手的结构方案设计
根据设计任务中工作要求分析出机械手运动的情况,包含2个自由度:手臂的上下移动和左右移动。由于本设计的机械手的左右行程较长且为直线运动,故应采用平行的两段滚动导轨来完成机械手的水平移动,并利用桁架支撑起机械手的主要部分,而臂部采用直线缸来进行手臂的伸缩从而完成机械手的上下移动。根据该机械手所持工件为质量小尺寸大且形状较规则的大平面板料,若采用夹持型则成本较高,并且很难满足所需要求;由于气体吸收型机械手一般结构简单,重量轻,使用方便可靠,因此对要吸附的工件的预定位置不需要高精度。故采用气吸附型。
2.2机械手的驱动方案设计
驱动机构在很大程度上决定了机械手的性能。气动机械手具有维护简单,结构简单,气源方便,成本较小,安全可靠而且泄漏对环境影响小等特点,因此采用气动驱动机械手的上下移动。而机械手的水平移动行程较长,且需要较高精度的移动,故采用齿轮齿条机构进行驱动。
2.3机械手的控制方案设计
由于机器人具有很高的自动化程度和通用性,并且根据机械手的运动方式可采用点控制,所以我们可以采用PLC来完成机器人的自动化工作流程,并分为手动,自动,单步,单周期等操作。当机械手的工作流程或运动范围需要改变时,只需修改可编程控制器的控制程序即可解决,具有很强的适应性和通用性。
第3章 手部的设计
3.1真空泵
3.1.1真空泵的分类
真空泵是指使用机械或物理化学等方法在封闭空间内获取真空的装置。真空技术在近些年来进展迅速,真空泵已经在许多方面得到了加强和拓展,发展出了多种多样的类型。按照真空泵工作时的运行原理,可分为两种类型:气体输送泵和气体捕集泵。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: