无传感器无刷直流风机控制器设计毕业论文
2020-04-08 14:23:57
摘 要
由于飞机上空间狭小,飞机机载设备舱各种高集成度的航空产品需要长时间工作在密闭环境中,其散热问题就显得尤为重要,必须为这些设备配高效可靠的电动机,由于无刷直流电机结构简单、安全可靠,使其成为了航空风机的最佳选择。
本论文设计了一种无刷直流电机无位置传感器控制系统,其去掉了传统的位置传感器,减小了重量和体积;采用反电动势过零点法检测转子的位置信息;采用电子换相电路取代了普通直流电机的机械换相,弥补了机械换相易产生积碳、电弧的缺点。同时本文还设计解决了由于反电动势经过低通滤波产生相位延迟的问题,以及任意位置启动问题。
首先,论文从研究背景和国内外研究现状,以及针对无刷直流电机的热点研究方向出发,在分析电机的结构和工作原理的基础上,建立了无刷直流电机的数学模型,为控制器的设计奠定理论基础。
其次,论文详细分析了所采用的无刷直流电机启动方法,即“三段式启动法”。对于反电动势信号的检测,则提出重构模拟中性点的电压比较检测法,并设计了调节电路对反电动势信号进行滤波、降压处理,使得最终输出信号可以直接给入处理器中。
最后设计了系统的速度、电流双闭环控制策略,并在Simulink仿真平台上搭建了仿真模块,在Proteus中搭建的硬件的电路图,给出了软件编程的流程图。经过仿真实验,验证了控制器的有效性。
关键词:无刷直流风机;无位置传感器;反电动势过零检测法;双闭环控制
Abstract
Due to the small space on the plane, various highly integrated aviation products in aircraft equipment bays need to work in sealed environments for a long time. The problem of heat dissipation is particularly important. It is necessary to match these equipment with high efficiency and reliable motor. Because the structure of the brushless DC motor is simple, safe and reliable, making it the best choice for aviation fans.
In this paper, a sensorless control system for brushless DC motor is designed, which removes the position sensor which increases the volume and cost of the motor. The position information of the rotor is detected by the inverse EMF zero crossing method. The electronic commutation circuit is used to replace the mechanical commutation of the ordinary DC motor, which makes up for the shortcomings of mechanical commutation and easy to generate carbon and arc. At the same time, this paper also designed and solved the problem of phase delay caused by back EMF through low-pass filtering, and any position to startup problem.
Firstly, from the research background and the research situation at home and abroad, as well as the hot research direction of the brushless DC motor, based on the analysis of the structure and working principle of the motor, the mathematical model and mechanical characteristic equation of the brushless DC motor are established, which lays a theoretical foundation for the design of the controller.
Secondly, the paper designs the starting method of brushless DC motor, analyzes the "three-stage start method" used in detail. For the detection of the back EMF signal, a method for detecting the voltage of the rectified analog neutral point is proposed, and the adjustment circuit is designed to filter and step down the back EMF signal so that the final output signal can be directly input into the processor. .
Finally, the speed and current double closed loop control strategy of the system is designed, and the simulation module is built on the Simulink simulation platform, the circuit diagram of the hardware built in the Proteus and the flow chart of the software programming are given. The effectiveness of the controller is verified by simulation experiments.
Key Words:Brushless DC draught fan; sensorless; Back EMF zero-crossing detection method; Double closed loop control
目 录
摘 要 I
Abstract II
第1章 绪 论 1
1.1 研究背景及意义 1
1.2 国内外直无刷流电机研究动态和趋势 2
1.3 本文主要研究内容 2
第2章 无刷直流电机控制系统的基本原理 5
2.1 控制系统组成 5
2.2 工作原理 6
2.3 数学模型 7
2.3.1 定子电压方程 7
2.3.2 反电动势方程 7
2.3.3 转矩方程 8
2.4 本章小结 8
第3章 无刷直流电动机控制器的设计 9
3.1 启动方法的设计 9
3.1.1转子预定位 9
3.1.2变加速阶段 10
3.1.3 变加速阶段到自同步的切换 10
3.2 位置检测方法的研究 11
3.3 反电动势信号的处理 13
3.4 反电动势过零检测电路的设计 14
3.5电流检测电路的设计 15
3.6 控制处理器的选择 15
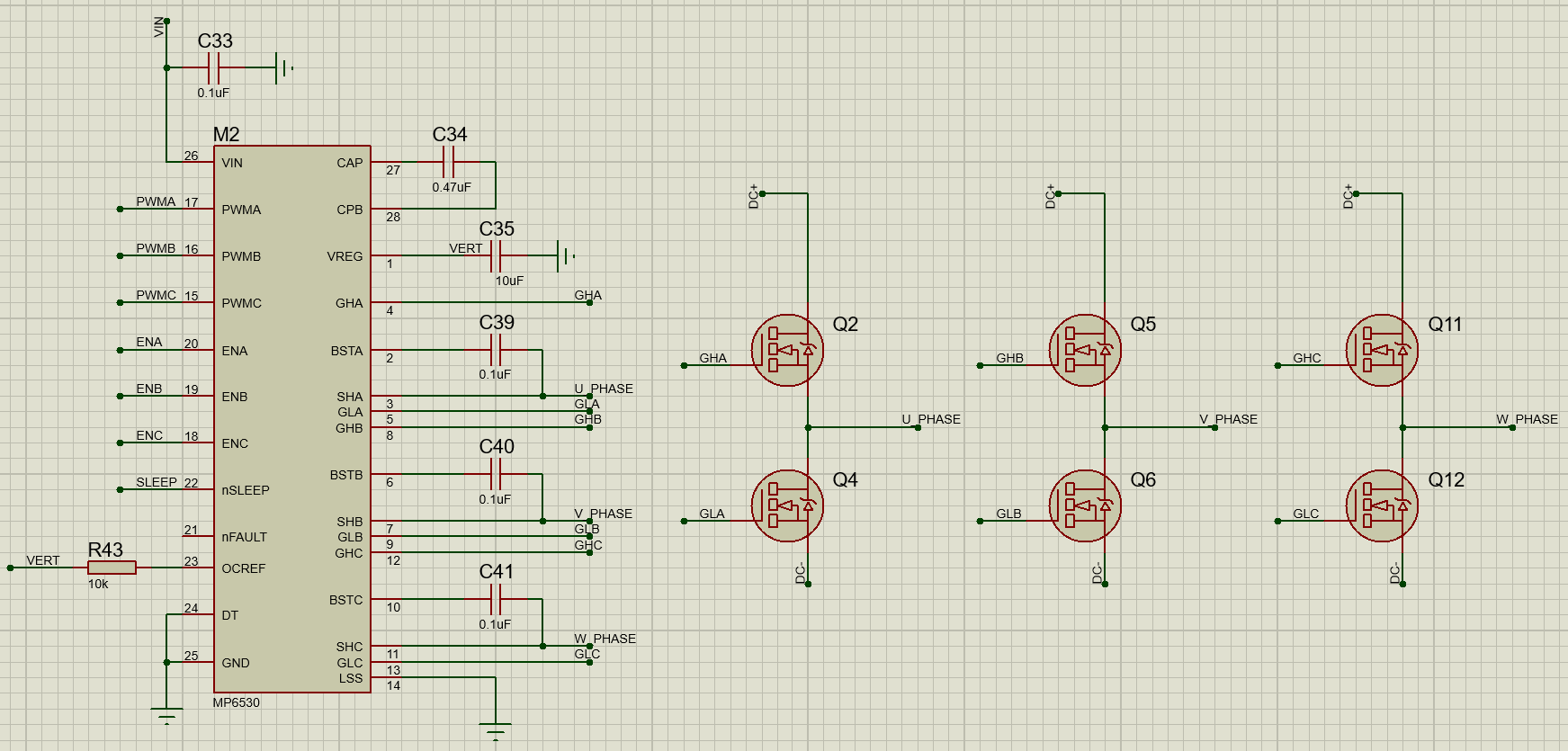
3.7 驱动电路的设计 16
3.8 其他外围电路的设计 16
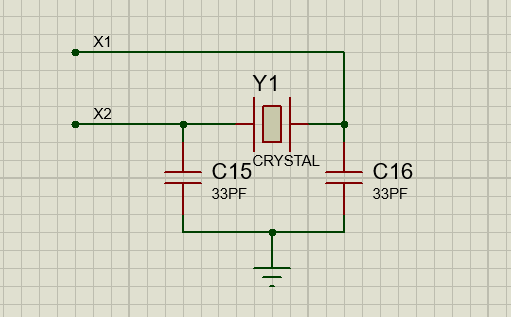
3.8.1 晶振电路的设计 17
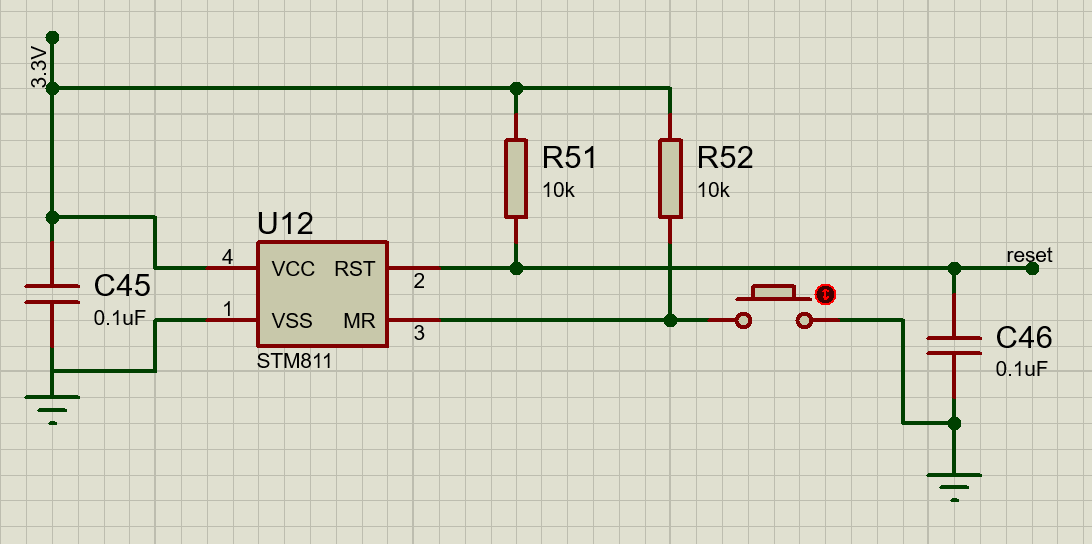
3.8.2 复位电路的设计 17
3.8.3 电源电路的设计 17
3.9 本章小结 18
第4章 控制系统的仿真 19
4.1 双闭环控制策略 19
4.2 Matlab/Simulink的控制仿真 19
4.3 本章小结 22
第5章 控制器软件的设计 23
5.1 软件主程序流程图 23
5.2 换相子程序 23
5.3 双闭环控制流程图 24
5.4 实物平台的建立 25
5.5 本章小结 26
第6章 总 结 27
参考文献 29
附录A 31
附录B 32
致谢 36
第1章 绪 论
1.1 研究背景及意义
无刷直流电动机由于半导体电子技术的发展才兴起的新型电机,是集现代电力电子技术、控制理论和电机技术等多学科于一体的产物。早在1934年,就有人提出过将机械换相用电子管线路替代的想法,由于当时电子器件技术水平过低,而且制造成本又太高,这种电动机最终没有得到发展[1]。
1955年,美国D·哈里森等人首次提出了用晶体管换相代替电动机机械换相的方法,这就是现代无刷直流电机的雏形[2]。在无刷直流电机刚开始发展时,由于功率开关器件也刚刚兴起,可靠性低,价格昂贵,再加上驱动控制技术水平的限制,使得研发出来的无刷直流电机性能不高,没有得到推广使用。其迅速发展是在1970年以后,半导体技术的进步极大的推动了无刷直流电机的发展[3]。
随着现代化、办公化的发展,家用电器、工业设备等都趋向于高效化、小型化和智能化,使得电动机必须具有高精度、速度快、高效率的特点,使得对无刷直流电机的需求也在迅速增加。不仅在工业领域,在民用领域中无刷直流电机的应用也非常广泛,其数量和种类都在迅速发展。目前,在新一代的家电设备中,如空调、冰箱、吸尘器等都广泛采用无刷直流电机来驱动,根据实验显示,采用无刷直流电机驱动的家用设备,其节能效果比传统电机驱动要高30%-40%。在以节能为主题的现代社会中,无刷直流风机的应用价值将更加巨大 [4]。
随着无刷直流电机技术的进一步发展,现代无刷直流电机控制系统在逐渐向数字化、总线化方向发展[5]。现阶段,无刷直流电机控制器以DSP为控制核心,引入先进的智能控制算法,再结合CAN总线通讯技术,已经成为国内外主流的设计方法。由于DSP强大的运算处理能力,容易实现复杂的控制算法,提高控制性[6]。
目前航空领域多采用无位置传感器无刷直流电机。由于飞机上空间狭小,飞机机载设备舱装满了各种高集成度的航空产品,如飞控计算机、火控计算机等,这些设备需要长时间工作在密闭环境,其散热问题就显得非常突出,为此必须为这些设备配高效散热风机,此外,飞机对其电机重量及体积的要求也极为严格[7]。
而传统的直流电动机需要转子位置传感器来检测位置信号,这些传感器不仅使电机体积增大、成本变高,而且在恶劣工作环境中外界干扰常常使常规传感器无法使用[8],这不可避免的降低了电机的抗干扰能力,严重限制了其应用范围,所以需要一种无位置传感器的控制方法来控制电机运行。
由于上述传统直流有刷电机的各种弊端,无刷直流电机的优点就显得尤为突出,其具有控制简单、运行可靠、无机械换相、维护方便、运行效率高、调速性能好,结构紧凑等优点,故被广泛应用于各行各业。据此,本次设计以散热风机为载体,设计一种基于航空散热风机的无位置传感器无刷直流电机的控制系统。
1.2 国内外直无刷流电机研究动态和趋势
由于无刷直流电机的诸多优点,使得其成为热门的研究领域,国内外研究学者相继提出了各种构思巧妙的无传感器控制方案,扩大的调速范围。尤其是近年来,处理器的控制精度和运算速度都在迅猛发展,使得无传感器控制方案更加趋向于智能化。同时在控制算法上结合了模糊控制、智能控制,大大提高了电机控制系统的鲁棒性[9]。
对于无刷直流电机的研究,目前主要在转子位置检测技术方向、转矩波动抑制技术方向、以及低速控制的研究这三个方向[10]。
(a)无位置传感器转子位置检测技术
传统的无刷直流电机的转子位置信息是是通过位置传感器来检测的。通常采用霍尔传感器、光电编码器或者其他元器件。但是带有传感器的无刷直流电机因为传感器的原因增加了电机的结构尺寸,且不易安装和拆卸维修,同时由于传感线路的存在,降低了系统的稳定性,容易受到外界干扰[11]。因此无位置传感器的无刷直流电机的优点就显得额外明显,此外,在一些极端恶劣的环境中,位置传感器无法可靠的运行,这就使得无传感器检测是唯一的方法[12]。如空调压缩机充满强腐蚀性制冷剂就会使得位置传感器是无法使用。无传感器检测所依据的原理是在转子转动过程中会产生容易被检测到的电压、电流、磁链等物理信号,根据这些物理信号所提出的检测方法主要有反电动势过零点法、续流二极管法、反电动势积分法、基于反电动势三次谐波法、以及状态观测器法。目前应用广泛的是反电动势过零点检测法[13]。
(b)转矩脉冲抑制方法研究
无刷直流电机采用电子换相,通过不断通断开关来改变电机的相电流来实现让电机持续运转。但实际情况是由于一些不可控因素使得电流不能按理想方波的形式产生。而转矩随电流的变化而变化,这就必然会出现转矩的波动,在高精度的伺服控制系统中,这些转矩波动会严重影响系统的可靠性。国内外的研究人员针对这一问题做了大量的实验研究,但是由于引起转矩脉冲的原因是一些不可控因素,所以这些实验研究的结果并没有根本的消除转矩波动,而只是根据不同的实际情况提出了相应的补偿方式[14]。
(c)低速转速控制
在低速时,无刷直流电机的转子位置信息不易被采集到,同时在低速时,电机受摩擦等外界因素的影响较大,使其转动波动较大,这很大程度上影响了整个系统的性能,所以对低速转速控制成为了研究的热点。
1.3 本文主要研究内容
为解决飞机设备舱机载系统的散热问题,本论文设计应用于航空风机的无位置传感器直流无刷电机的控制器,软件实现电机转速的闭环控制,解决直流电机的启动难点问题。
为了能直接将控制器安装在电机端盖上,所以把控制器设计为圆形。所控制的电机属于小功率的中速航空无刷直流电机,其工作在温度高、条件苛刻的环境中,所以控制系统要满足耐高温、高可靠性的要求。并且使得风机启动平缓、电流冲击小以及工作平稳。无刷直流电机以其功率密度高、摩擦损耗小,噪声低、重量轻等优点,不仅用于航空风机,还被广泛应用于鼓风机、压缩机等高端工业制造设备中。风机模型如图1.1和图1.2所示。
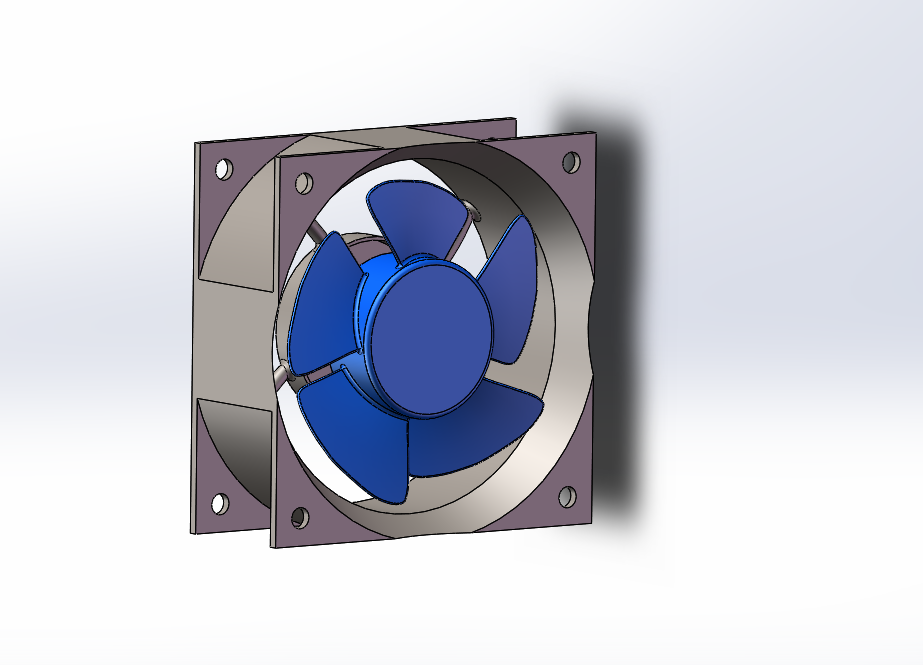
图1.1 风机整体图
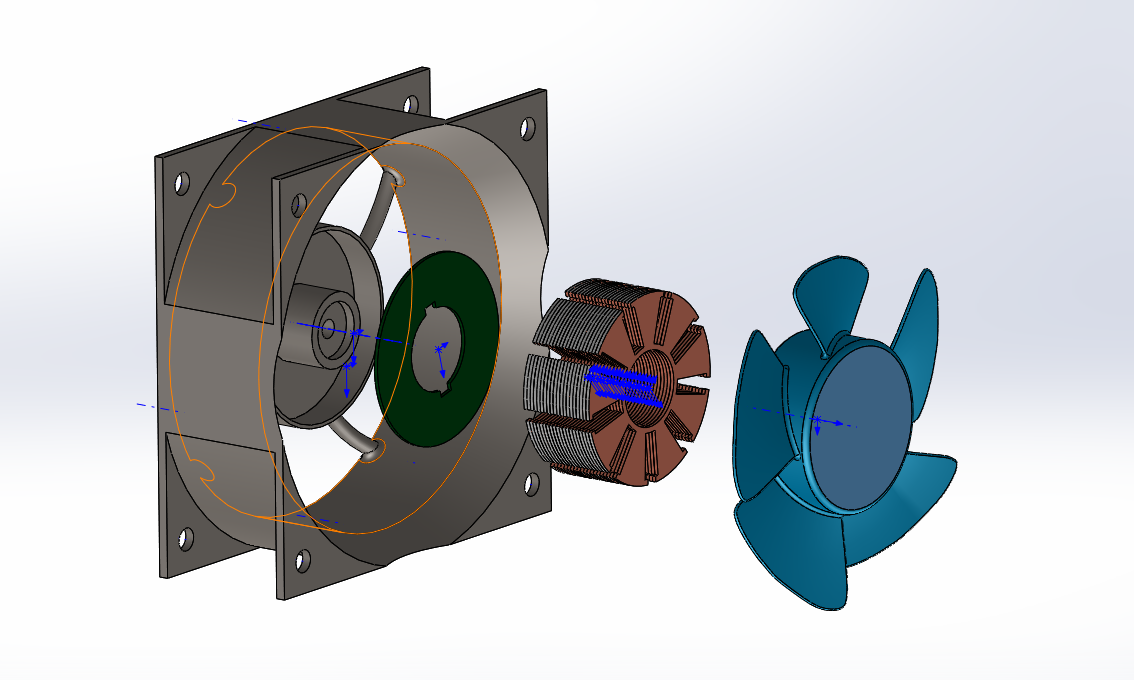
图1.2 风机组成图
上图中,序号1为风机壳体,序号2为电机的控制器,序号3为定子绕组,序号4为风扇和永磁体。
本设计在设计控制系统时,对无刷直流电机运行方式进行了全面的分析。并针对位置检测、启动方式和控制方法等问题进行了深入的研究,
(1)基于信号处理的转子位置检测方法
无传感器直流无刷电机系统由于去掉了霍尔传感器,导致如何检测转子位置成为一个关键问题。本文拟通过检测和处理电动机的电气信号的方法来间接获取转子的位置信息,使用软件来实现电机转速的闭环控制。
(2)启动方法及控制研究
整个控制系统以处理器为核心,速度、电流双闭环PI调节控制电机的运行,电机反馈控制调节等都由软件完成,简化了硬件结构,节约了成本,提高了系统的可靠性。针对无位置传感器无刷直流电机启动难的问题,采用三段式启动法。对于位置信号检测,采用反电动势过零点检测法,但高速时由于低通滤波、电路延时等因素会导致检测的位置信号产生误差,影响了电机性能,所以需要对延迟进行补偿处理。
(3)无位置传感器无刷直流电机运行原理分析
无刷直流电机采用电子开关管的频繁导通关断来控制电机换相,所以需要分析研究如何准确检测转子位置信息并及时换相,确定换相逻辑。在检测到的位置信号后,由于一些噪声的干扰,使得信号产生延迟,需要对其进行修正。
(4)直流无刷电机及控制器的设计
设计直流无刷电机及控制器的原理模型,采用Proteus软件设计电路,搭建实验平台,完成综合调试,使该系统具有良好的控制性能,换相准确,具有实用价值。
第2章 无刷直流电机控制系统的基本原理
无刷直流电机以电子开关电路替代了机械换相电刷,又以检测电路检测转子位置信息,这就要求必须要使用控制电路来控制电机的运行,所以对电机运行基本原理和数学模型的掌握就尤为重要。本章内容主要介绍控制系统的组成、工作原理、数学模型以及控制方式,为后续的设计提供理论基础。
2.1 控制系统组成
无刷直流电机的控制器主要由转子位置检测电路、处理器和电子开关电路组成。转子位置检测电路通过转子旋转产生的电气信号检测转子的位置信息,然后经过降压滤波处理后送入控制器中,控制器将位置信息经过计算处理后产生相应的PWM信号控制电子开关的导通与关断,进而使得无刷直流电机换相和连续运行,实现以电子换相取代传统的机械换相[15]。图2.1为控制系统的组成框图。
输出出
电动机本体
转子位置检测电路
电子开关电路
(逆变器)
直流电源
处理器
图2.1 控制系统的组成框图
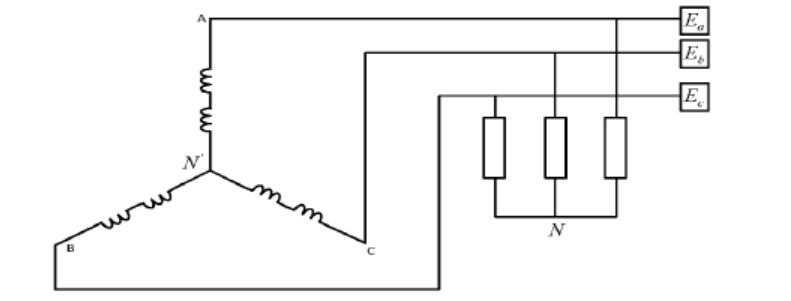
其中电子开关线路采用三相桥式电路,通过不断开关驱动管使电机换相持续运行。控制器是整个系统的核心部分,接收并处理检测到的反电动势信号以确定转子位置,产生PWM信号控制逆变电路,速度控制等。无刷直流电动机定子绕组的连接方式一般有星形连接和三角形连接,本次设计采用星形连接方式,其电路原理如图2.2所示。
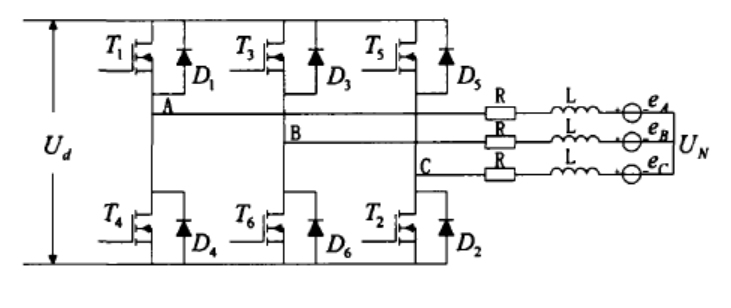
图2.2三相全控电路及电机等效模型
2.2 工作原理
如图2.1所示,三相星形绕组星形连接的无刷电机结合了三相桥式电路,组成了三相全控运行方式。无刷直流电机用电子开关电路不断导通关闭电子开关驱动管,使定子绕组产生旋转的磁场,与永磁体的磁场相互作用,产生持续不断地转矩,推动电动机连续运转。在电动机转子转动时,定子绕组会切割永磁体的磁感线,会产生反电动势,通过控制器对反电动势的检测处理就能获得转子的速度和位置信息,进而再通过PWM调制技术控制换相,实现了电机的闭环控制[16]。
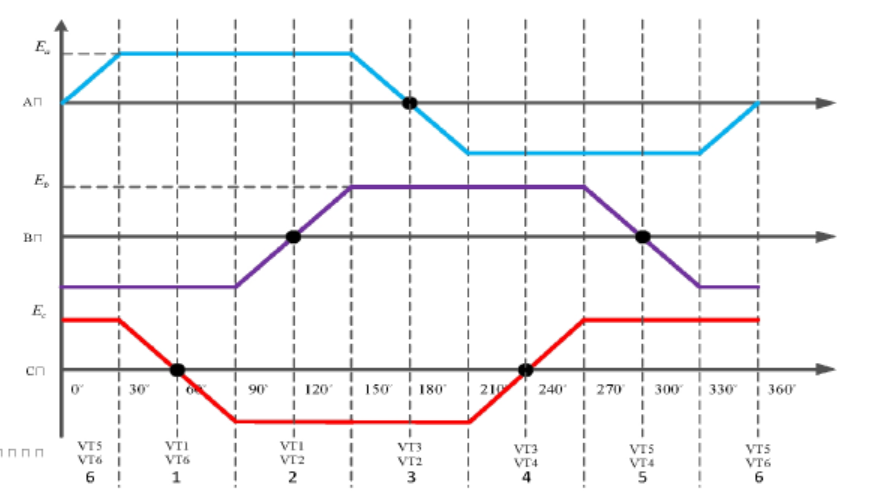
根据功率开关元件同时导通的绕组数目不同,可以分成两种将控制方式,分别为“三三导通方式”和“二二导通方式”[17]。本文采用“二二导通方式”进行设计,所以对该方式进行详细的说明。“二二导通方式”结合2.1中所介绍的连接方式,就是无刷直流电机常采用的“二二导通星形三相六状态”工作模式。在这以模式下,同一时刻,只有两个不同相的上、下桥臂元件被导通,各个功率开关元件导通时持续120°电角度,每隔60°电角度换流一次,在这种导通的方式下,电机绕组一共有六种导通状态,其所产生的磁场是一种步进的旋转磁场。导通关系如图2.3所示:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: