滚珠丝杠传动机构的运动学优化外文翻译资料
2022-11-13 16:13:54
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
本科生毕业设计(外文翻译)
滚珠丝杠传动机构的运动学优化
a.卡拉布里亚大学 机械工程系,意大利,87036 Arcavacata di Rende(CS)
b.国立成功大学 机械工程系,台南70101,山东,台湾,
2005年6月20日收到,2006年2月13日接受,2006年4月13日可在线
摘要
本文提出了一种用于传动机构的运动学优化方法,其中使用非圆形(NC)齿轮对输出运动进行机械控制。 本文提出的调查涉及滚珠丝杆传动机构的运动控制。目的是通过设计一对可变半径齿轮作为驱动机构来降低螺杆的峰值加速度。 通过无量纲运动方程对滚珠丝杠机构的运动特性进行了分析,以制定优化问题。 然后以遗传算法(GA)优化目标函数,并且使用罚函数来设计规则。
与以恒定速度运行的恒定螺距螺杆相比,最佳机构的运动学分析显示螺杆的峰值加速度降低了37%。 运动学模拟用于验证该方法。
关键词:滚珠丝杠传动;运动学优化;遗传算法;数控齿轮
- 介绍
追求高生产力和高品质的工业敦促研究人员找出的有效机械设计方法,以提高自动化机器的性能。
假定输入速度恒定提高输出运动特性的传统方法,被提出重新设计和制造不同的机制,使之具有更好的运动或动态性能。由Mills等人提出的柔性凸轮机构的优化设计便是一个例子。[ 1 ]
通过设计可变输入/输出驱动系统,对于解决问题的另一种方法是主动控制机构输入速度。1956年,Rothbart [ 2 ]提出了一个Withworth急回机构提供凸轮具有可变输入速度的使用,从而减小凸轮尺寸,进而减小压力角。后来,Tesar和Matthew[ 3 ]推导出了可变输入速度凸轮从动机构分析的运动方程。
快速发展的伺服电机及其控制系统的研究设计人员提出伺服集成机制,其特征在于计算机控制的输入速度。1994年,Chew和Plan[4]使用直流伺服电动机以尽量减少高速机电结合机中的残余振动,而Yan等[5] [6]表明跟随器的运动特性取决于凸轮的速度曲线。此外,他们提出了凸轮机构主动控制理论[7],开发了一种设计最优计算机控制输入速度函数的方法。
1990年,Kochev[8]提出主动平衡摇摆力矩和平面连杆机构中的转矩波动,而最近Yao等人[9]研究了变速平面机构的动力学特性。
尽管有广泛的文献作为可变输入速度函数的运动优化的参考,很少有研究集中在滚珠丝杠传动技术的应用。这种基本上由滑块 - 曲柄系统驱动的滚珠丝杠连杆形成的机构被用于许多工业领域中。1993年,Yan和Liu [11]提出了一种设计和制造具有圆柱形啮合元件-可变螺距导杆的方法。他们进一步提出了滑块的线性位移和螺杆的旋转之间的三次多项式关系。最近,Liu等人[12]利用伺服电动机来主动地控制曲柄-滑块机构的输入速度,以便减小螺杆的峰值加速度。
本文提出的工作目的是通过设计一个基本上由一对非圆形齿轮驱动的曲柄滑块系统形成的驱动机构来优化滚珠丝杆传动装置的输出运动。然后提出一种输入恒定的转速驱动NC齿轮,并且螺杆被迫根据最优运动定律运动的组合机构。
螺杆的纯机械控制是基于可变半径节距线的运动学合成,从最优输入/输出关系开始[13] [14] [15]。由于在本应用中不需要灵活的控制策略,所以计算机控制的伺服电机可以由更便宜有效的一对NC齿轮代替。
为了设计一个最佳的驱动机制,推导出了无量纲运动方程。然后定义罚函数作为其中的设计约束插入目标函数,而优化问题则通过使用进化理论来解决[16]。遗传算法广泛应用于全球优化问题。进化技术的主要优点是它们在实现数值过程中的简单性和低的计算成本[17]。此外,不需要深入了解搜索空间的数学特征。
一旦进行了NC齿轮的优化设计,就可以使用组合机构的虚拟原型和运动学模拟来验证所提出的控制策略。
- 运动方程
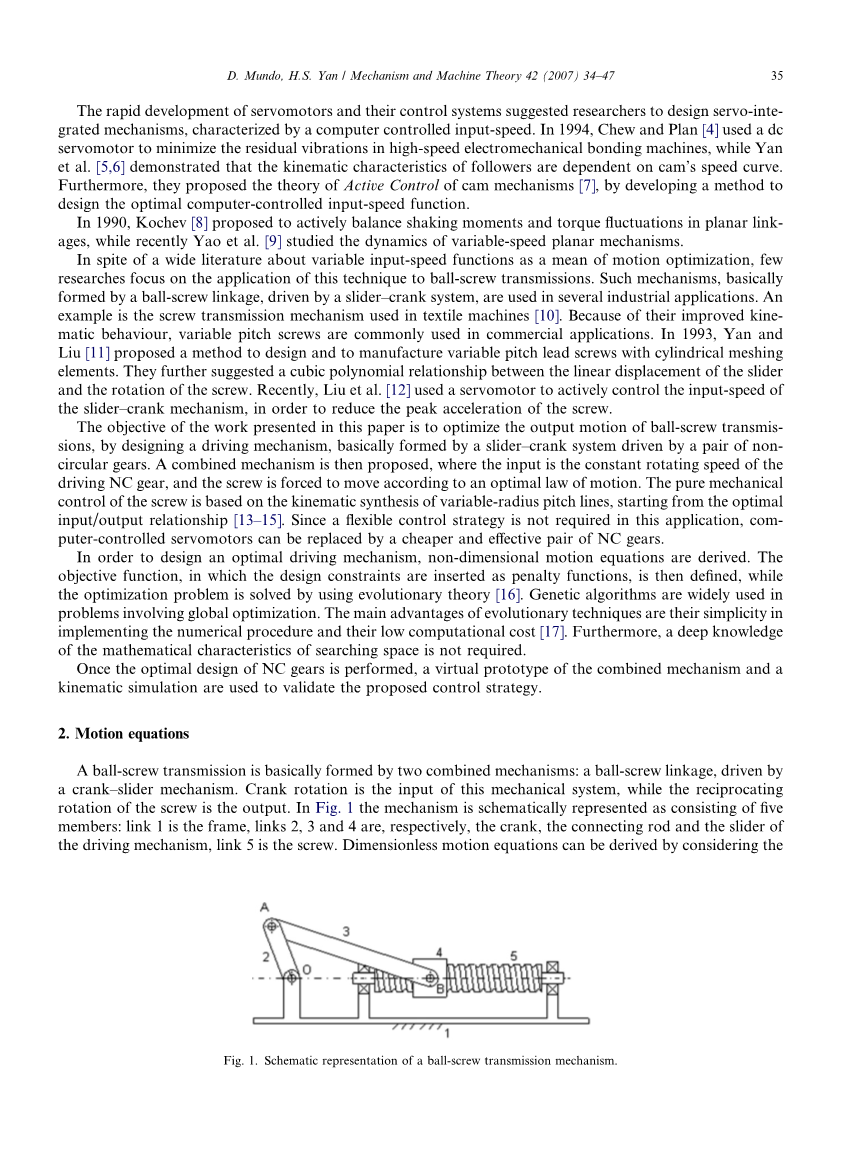
滚珠丝杠传动装置基本上由两个组合机构形成:由曲柄滑块机构驱动的滚珠丝杠连杆。 曲柄旋转是该机械系统的输入,而螺杆的往复旋转是输出。 在图1. 该机构示意性地表示为五个构件:连杆1是框架,连杆2,3和4分别是驱动机构的曲柄,连杆和滑块,连杆5是螺钉。无量纲运动方程可以通过分别考虑两个基本机制得出, 如图2(a)所示。参照图2, 曲柄- 滑块机构的位置方程如下:
(1)
(2)
r2和r3是曲柄和连杆的长度,theta;2和theta;3是链节与负X轴形成的角度,r4是滑块的位置。
通过联立方程(1)(2),滑块的位移s可以确定为
(3)
当曲柄在等于机构运动的一半周期的时间tau;内旋转角度pi;时,滑块完成2倍r2的冲程。 然后可以通过定义以下无量纲参数来推导无量纲运动方程:
, (4)
, (5)
, (6)
其中tisin;[0,tau;],sisin;[0,2r2],theta;isin;[0,pi;],而T,S和Theta;在0和1之间变化。
用等式 (4),(5),(6)代入式 (3)得到无量纲滑块位移:
(7)
其中无量纲长度R3被定义为r3 / 2r2。
通过对T求微分方程 (7),获得无量纲滑块速度(V),然后获得加速度(A)和加加速度(J):
(8)
(9)
(10)
参考图 如图2(b)所示,假设螺杆的螺距p恒定,则输出旋转phi;由下式给出
(11)
从上式可以得出无量纲螺旋旋转sigma;
(12)
因此,由于恒定螺距螺杆的旋转与滑块位移成线性关系,所以螺杆和滑块无量纲运动方程相同。 螺杆无量纲速度,加速度和加加速度可以通过公式(8),(9),(10)计算 。
无尺寸运动方程表明,通过根据最佳运动定律Theta;(T)迫使曲柄旋转,可以提高恒间距螺杆传动的运动学。 在以下部分中,将实施优化策略以设计最佳控制功能。
一旦确定了最佳螺杆的无量纲运动特性,实际的运动学曲线可以通过以下关系式来确定, (8),(9),(10):
, (13)
, (14)
, (15)
(16)
其中phi;,v,a和j是螺杆的实际角位移,速度,加速度和加加速度。
3.最优控制策略
螺杆运动的最优控制要求定义目标函数和一组设计规则。 一旦制定了优化问题,将使用遗传算法来最小化成本函数。 采用罚函数法确保最佳解决方案满足设计规则。
3.1. 制定优化问题
优化问题的主要目标是设计曲柄的转速功能,以便主动控制螺杆运动学,并在滑块的向前行程期间最小化其峰值加速度,从而在工作期间可以减少惯性加载问题期。此外,螺杆和曲柄运动特性都应满足一组运动要求和一般设计规则。 螺杆速度和加速度曲线必须是连续的,而需要加速度的有限值。 因此,从等式 (7),(8),(9),(10)曲柄转速Omega;(T)必须至少为二阶微分功能。 如果选择曲柄旋转Theta;(T)作为控制功能,则可以以下列形式定义第四或更高阶多项式表达式:
(17)
必须确定设计变量(a0,...,aN),以便螺杆根据运动的最佳定律和以下边界条件旋转,从公式(6),满足:
, (18)
。 (19)
从等式(17),(18),(19),得出以下条件:
, (20)
(21)
要完成优化问题的制定,必须定义成本函数。 主要目的是降低螺杆的最大加速度。 但是,最优控制功能必须满足以下设计规则:
1. 典型的曲柄连续旋转而不改变方向。因此,控制功能的时间导数不能改变。不失一般性,在这项工作中,曲柄速度将保持正态。
2. 控制功能的第二次导数必须适中,因为非圆形齿轮将用于为曲柄提供变速功能和突然变化。将确定不规则的间距线。
在设计规则的基础上,可以将成本函数定义为
(22)
其中权重因子w1和w2可以根据不同的优化策略进行调整,而P是用于在一个或多个变化从符号发生时的作为惩罚的控制功能。 罚函数法确保满足设计约束,因为任何不可行的设计参数集将具有比可接受解决方案更大的成本函数值。 显然,如果查看,则等式(22)被设置为零。
3.2. 优化方法
为了解决上一节提出的优化问题,采用进化方法的策略。 一种改进的遗传算法,如图1所示。 3,本文采用[18]。 第一步是由NP个体(染色体)形成的起始种群的产生。 每个人由一组设计变量允许值(基因)组成。 因此,通用个体是优化问题的可能解决方案,可以通过形式的实数向量来表示
(23)
其中n是独立设计变量的数量。
进化优化策略是基于最适合个人的生存。 这些人经历了一系列遗传操作(繁殖),以促进人口演变。 这个过程被称为自然选择。 复制的第一步是选择NP夫妇的个人(父母),其遗传信息将被合并以产生下一个人口的一个个体(子)。
因此,人口数量保持不变。 用于繁殖的个体的选择可以基于不同的概率分布,包括均匀分布。 在本工作中使用的算法中,使用归一化几何排名选择的方法。 根据以下表达式,选择个体的概率取决于其表现(适应度):
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137333],资料为PDF文档或Word文档,PDF文档可免费转换为Word



