极端工况下电动汽车混合动力储存系统的再生制动的控制方法外文翻译资料
2022-10-28 15:47:34
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
极端工况下电动汽车混合动力储存系统的再生制动的控制方法
Khaled Itani法国航空航天大学电力系、Liban法国国立工艺学院(贝鲁特,黎巴嫩)、khaled.itani@isae.edu.lb
Alexandre De Bernardinis电子电气工程师协会成员、Zoubir Khatir电子电气工程师协会成员、SATIE特马(加纳第二大城市)/法国交通部 法国凡尔赛、alexandre.de-bernardinis@ifsttar.fr zoubir.khatir@ifsttar.fr
Ahmad Jammal电子电气工程师协会资深成员 高等教育部门 贝鲁特(黎巴嫩)ajammal@higher-edu.gov.lb
Mohamad Oueidat法国大学科技学院-赛达 黎巴嫩大学mohoueidat@yahoo.com
摘要:本文介绍了电动汽车(EV)混合动力储能系统(HESS)的再生制动设计控制和模拟。 电动汽车由两个30 kW永磁同步电机驱动。 混合动力储能系统(HESS)包含一个锂离子电池和一个超级电容(UC)源。 在极端制动条件下,超级电容(UC)应能够恢复电机提供的所有功率。当实现超级电容(UC)的最大充电状态时,随后,能量将由电池恢复。制动电阻器的引入将有助于系统遵守电压和电流限制以及保护电池。本文将验证设计的控制器的组合,确保存储和耗散元件之间的切换,同时尊重整个系统的电气约束,特别是在临界制动条件下。将开发和验证仿真模型。
关键词:锂离子电池,超级电容器,再生制动,合成控制器,电动汽车,仿真
I. 引言
A 简介
在文献[1-4]中已经对用于电动,混合电动和插电式混合动力电动而不是独特的存储源的混合能量存储系统(HESS)的需要进行了很好的处理。通常,每种类型的存储系统具有其优点,并且还具有通过使用另一种类型的存储系统克服(相对)的限制性能。 在本文的实例中,电动车辆将由锂离子电池和超级电容器(UC)供电。使用超级电容器的主要目的是减少对电池的电约束并延长其寿命周期。
锂离子电池作为主要电源。然而,锂离子电池具有有限的功率密度和有限的充电/放电循环次数。在车辆的加速和制动期间使用超电容器的方法可以增加电池的寿命并满足车辆动力表现的期望性能。对于混合动力电动汽车,一些研究提出将平均功率分配给主源(例如燃料电池)能量存储,根据特定能量的管理所使用多项式[5]或预测控制技术,由于其动态限制,UC的功率会有波动。
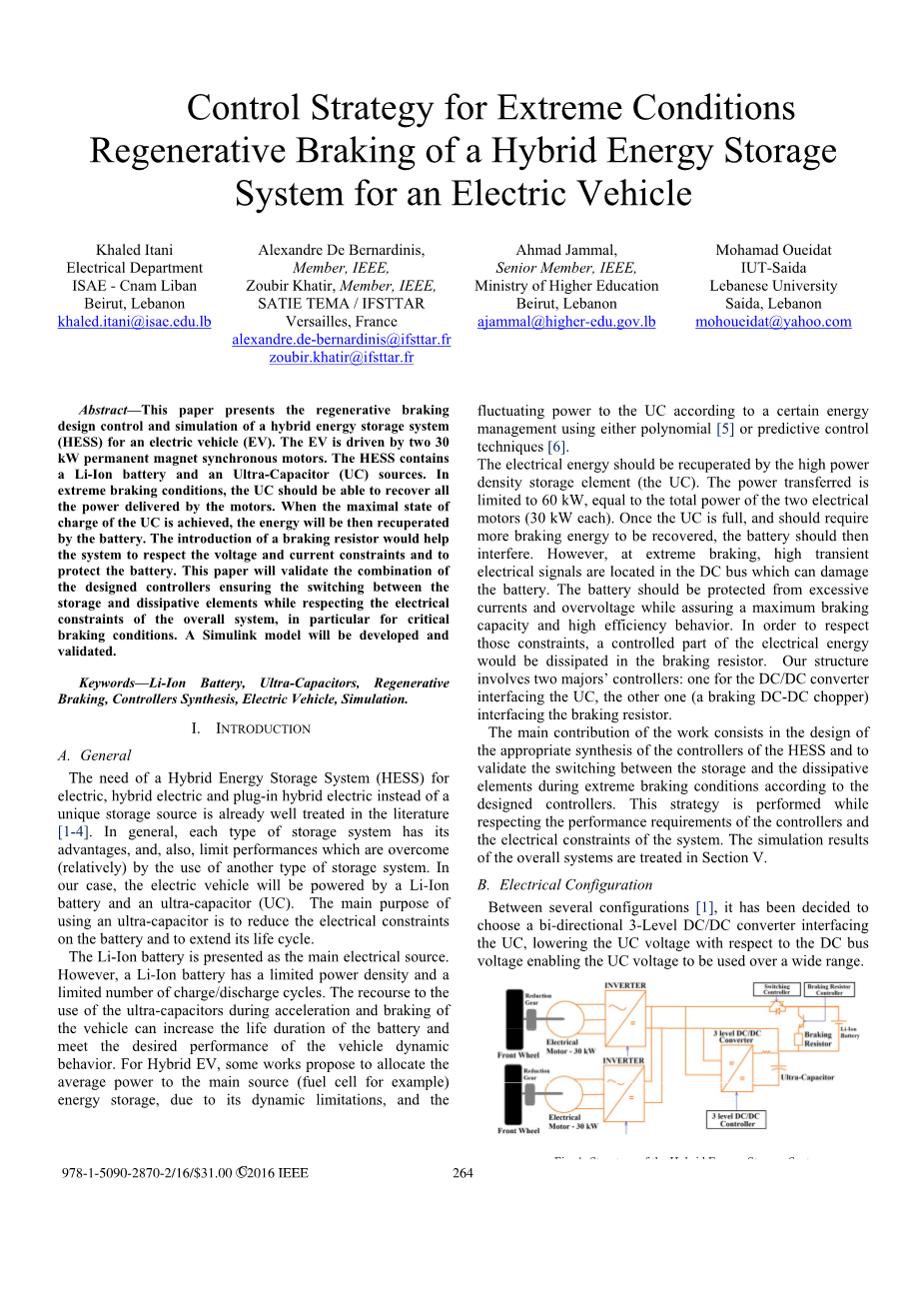
电能应该由高功率密度存储元件(UC)恢复。传输的功率限制为60 kW,等于两台电动机的总功率(每台30 kW)。一旦UC充满,并且应该需要更多的制动能量来恢复,此时电池将受到影响。然而,在极端制动时,高瞬态电信号位于直流总线中,这可能损坏电池。 应该保护电池免受过大的电流和过电压,同时确保最大制动能力和高效率行为。为了遵守这些约束,电能的受控部分将在制动电阻器中耗散。 我们的结构涉及两个主要的控制器:一个用于DC / DC转换器与UC连接,另一个(制动DC-DC斩波器)连接制动电阻器。
该工作的主要贡献在于设计HESS的控制器的适当合成,并且根据设计的控制器在极端制动条件期间验证存储元件和耗散元件之间的切换。在遵守控制器的性能要求和系统的电气约束的同时执行该策略。第五节讨论了整个系统的仿真结果。
B 电气配置
在几种配置[1]之间,已经决定选择与UC连接的双向3级DC / DC转换器,相对于DC总线电压降低UC电压,使得能够在大范围内使用UC电压。
图1 混合储能系统的结构
逻辑电路控制位于制动电阻器下游的IGBT开关。它将允许在制动模式下超级电容器和电池之间的切换(图1)。该电路的输出为:
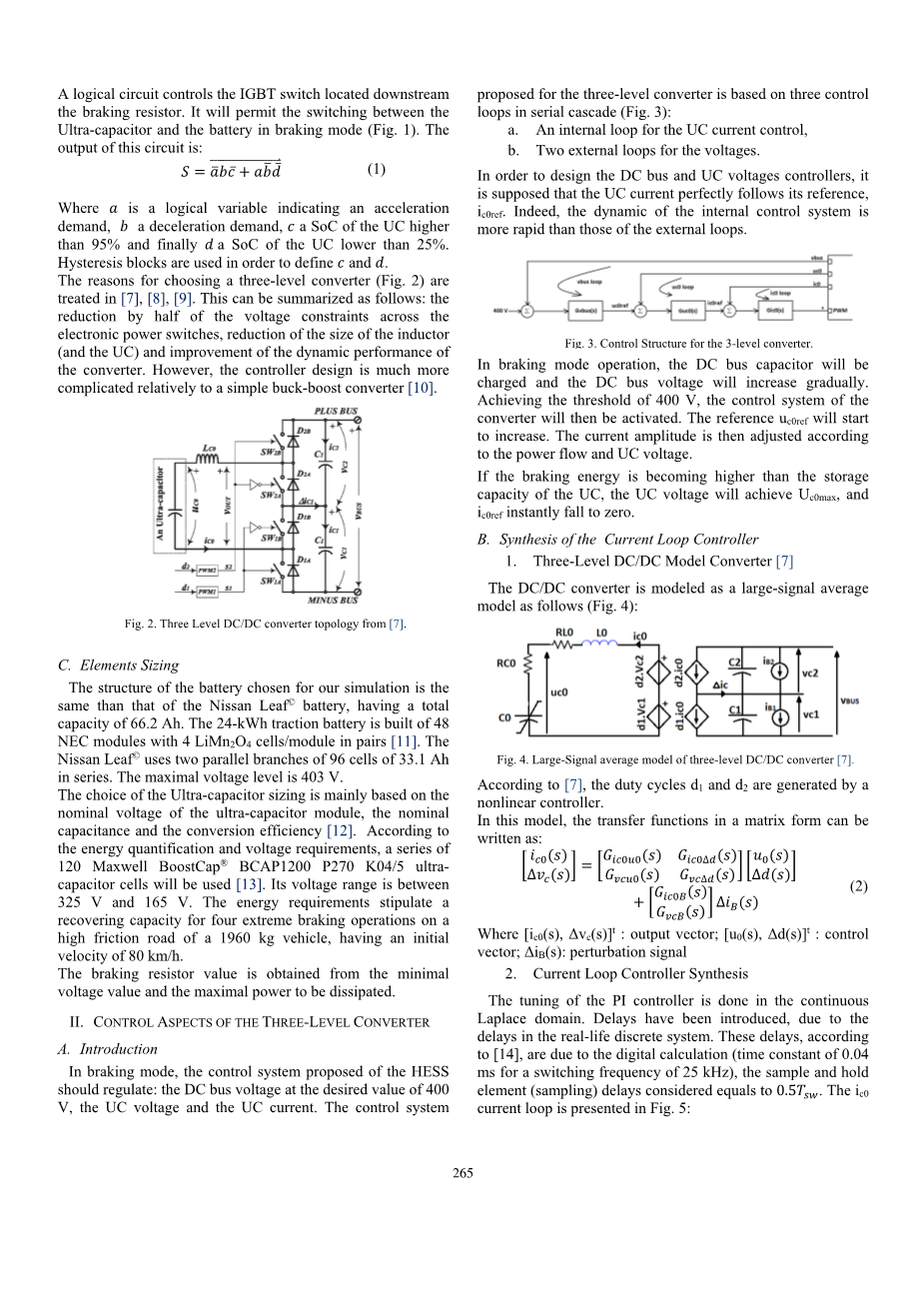
其中,是指示加速需求,减速需求,UC的SoC高于95%并且最终UC的SoC低于25%的逻辑变量。使用滞后块以便定义c和d。选择三电平转换器的原因(图2)在[7],[8],[9]中处理。这可以总结如下:在电子功率开关上减少电压约束的一半,减小电感器(和UC)的尺寸以及改善转换器的动态性能。然而,相对于简单的降压 - 升压转换器,控制器设计要复杂得多[10]。
图2 的三级DC / DC转换器拓扑[7]
C 元素大小
我们的模拟选择的电池的结构与日产Leaf电池相同,总容量为66.2 Ah。 24 kWh牵引电池由48个NEC模块构成,4个LiMn2O4电池/模块成对[11]。日产Leaf使用两个并联分支的96个单元的33.1 Ah系列。最大电压电平为403 V。
超级电容器尺寸的选择主要基于超级电容器模块的标称电压,标称电容和转换效率[12]。 根据能量定量和电压要求,将使用一系列120个MaxwellBoostCapreg;BCAP1200 P270 K04 / 5超级电容器单元[13]。其电压范围在325V和165V之间。能量要求规定了1960kg的车辆在高摩擦路面上四个极端制动操作下的恢复能力,初始速度为80km / h。
制动电阻器值需要从最小电压值和要消耗的最大功率中获得。
II. 三电平变换器的控制方面
A 简介
在制动模式下,所提出的HESS的控制系统应该调节:DC总线电压在期望值400V,UC的电压和UC的电流。 控制系统提出的三电平转换器是基于串联级联的三个控制环(图3):
(1)
a.一个内部环路的电流控制;
b.两个外部回路的电压。
为了设计DC总线和UC电压控制器,假定UC电流完全遵循其参考ic0ref。 事实上,内部控制系统的动态比外部回路的动态更快。
图3 三电平转换器的控制结构
在制动模式下,直流母线电容充电,直流母线电压逐渐上升。达到400V的阈值,控制系统的转换器将被激活。Uc0ref参考值将开始增加。然后根据下式调整电流幅度到功率流和UC电压。
如果制动能量变得高于存储UC的容量,UC电压将实现Uc0max,并且ic0ref立即下降到零。
B 电流回路控制器的合成
1 三级DC / DC转换器[7]
DC / DC转换器被建模为大信号平均模型,如下(图4):
图4 三电平DC / DC转换器的大信号平均模型[7]
根据[7],占空比d1和d2由非线性控制器产生。
在这个模型中,矩阵形式的传递函数可以写为:
(2)
其中[ic0(s),vc(s)] t:输出向量; [u0(s),d(s)] t:控制向量; iB(s):扰动信号
2 电流环控制器合成
PI控制器的调谐在连续拉普拉斯域中进行。 由于实际离散系统的延迟,引入了延迟。 根据[14],这些延迟是由于数字计算(对于25kHz的开关频率的时间常数为0.04ms),考虑的采样和保持元件(采样)延迟等于0.5。ic0电流回路如图5所示:
图5 ic0电流环的设计
通过近似,我们将采取:
(3)
L0和RL0分别是滤波器的电感和电阻的值。
如果我们认为平衡占空比(D)为零,要消除的DC / DC电流的主极点tau;ic0= L0 / RL0。 ic0控制器由:
(4)
其中kpic0和kiic0分别是电流控制器的比例和积分增益。
我们将采样,算法演算和零阶保持元件的传递函数与具有全局时间常数Tsi = 2.Tsw的一阶传递函数。在这种情况下的开环传递函数是:
使用最优模量设计标准以计算PI电流控制器的增益,其中阻尼因子选择为zeta;= 0.707。基于该标准,具有阻尼因子zeta;= 0.707的二阶系统的通用开环传递函数具有以下表达式:
将二阶传递函数的通用表达式与电流ic0的开环传递函数进行比较,可以得到PI控制器的增益:
C 电压控制器的合成
- 电压控制器的三级DC / DC转换器模型
这种三级DC / DC转换器建模在[12]和[15]中得到广泛的处理。将UC电压与UC电流相关的传递函数Gc0(s)近似为:
- 并且仅依赖于参数,电流和UC的电压。Rc0是UC内阻。而DC总线电压与作为控制变量的UC电流有关(根据函数传递)和所采用的负载功率作为扰动变量(根据函数转让)。 通过近似,我们应该有:
CBUS和REST分别是直流电容滤波器的电容和电阻。
- 电容电压控制器超电容器电压闭环如图6所示:
图6 超电容电压闭环
- 根据[12],Guc0(s)的比例增益kpuc0由下式给出:
(12)
- 其中Uc0max是最大接受电压变化,ic0max是UC的最大电流。
- 在计算积分增益时,我们将获得kiuco。
- DC总线电压控制器综合直流母线电压环路控制器如图7所示:
图7 直流母线电压控制器
我们知道:
开环传递函数为:
根据[16]中描述的方法,传递函数具有以下形式:
有一个PID参数为:
P1和P2是特征多项式的系数方程:P(s)= 1 P1.S P2.S2。P1和P2是已知的取决于系统的期望的动态性能。N为滤波器系数,控制器形式为:
具有阻尼因子zeta;和自然脉动omega;n,PI增益可以通过以下公式推导:
III. PI防倾控制器
PI抗饱和控制器已经用于超电容器(UC)电压控制器和DC总线电压控制器。当控制器饱和时,其因此在非线性区域中操作。包括增加控制信号的动作将对系统输出没有影响,称为收敛效应。这导致具有大的过冲和非常高的稳定时间的特征阶跃响应[17],[18]。饱和效应将推迟控制器的干预,这将延迟UC恢复并且在UC电压和DC总线电压侧上创建高瞬态和几乎不受控制的信号。
为了解决该问题,已经决定使用内部跟踪反馈回路来对PI控制器的积分器放电,称为反向计算抗饱和。
图8表示UC电压PI控制器的反向计算抗饱和结构。
图8 UC电压的抗饱和控制器结构
IV. DC / DC的伪级联控制器合成变
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137227],资料为PDF文档或Word文档,PDF文档可免费转换为Word



