两轮机器人与人类操作者之间的对象处理控制:一种经验方法外文翻译资料
2021-12-25 16:49:54
本科生毕业设计(论文)
外文资料与翻译
学生姓名 赖成成
导师姓名职称 郭钧 副教授
所属学院 机电工程学院
专业班级 过控zy1501
两轮机器人与人类操作者之间的对象处理控制:一种
经验方法
李承君和郑承宪
文摘:介绍了两轮机械手、两轮机械手和人操作手之间的对象处理控制。两轮机器人是为在室内环境中为人类服务而制造的。它有两个轮子来保持平衡,并且能够通过一个物体与人类操作员接触。采用一种基于位置的阻抗力控制方法来保持稳定的物体处理任务。当人类操作人员推动和拉动物体时,机器人也会做出反应,通过拉动和推动物体来调节特定的力来保持与物体的接触。两轮机器人的主从配置是为了处理一个物体而形成的,在这个物体中,主机器人或一个人引导装有力传感器的从机器人。将控制从位置切换到力,反之亦然。通过实验研究,评价了两轮移动机器人与机器人及人工操作人员进行物体处理任务的可行性。
关键词:合作,力控制,互动,两轮机器人。
1.引言
最近,在我们的生活中,我们有更多的机会直接或间接地与机器人互动。由于机器人的工作领域正逐渐从制造业转移到我们的办公室或家中,必然会发生更频繁的互动。
因此,与服务机器人相关的各种问题被提出并必须得到解决。清洁机器人是一种成功的服务机器人,它是一种具有真空功能的移动机器人。由于其简单的功能和成本效益,清洁机器人在市场上获得了成功。这种清洁机器人只有一个简单的功能,可以吸走地板上的灰尘,其成本不到几百美元。
另一个可行的机器人是教育机器人,教孩子们玩。教育机器人也是基于移动性的,具有模仿简单PC机的多媒体功能,教育机器人比清洁机器人更重视内容的移动性。
上述两种服务机器人的共同点在于功能简单,但缺乏操作性。操作技术被认为是机器人最重要的功能之一。操作已成功地应用于工业机器人。
演示了对象处理任务和其他繁重任务的功能性和有效性。
然而,操纵技术在机器人服务中的成功应用还没有报道。Twendyone已经被建造成一个家庭服务机器人,并展示了它使用两个手臂为人类提供食物的功能[1,2]。Kist开发的Marhu系列机器人是一种人形机器人,具有两个手臂处理物体的能力,并演示了携带物体的任务[3]。开发了一种洗衣辅助机器人来完成洗衣安排[4]。虽然已经证明了在我们的家庭环境中为人类服务的可行性,但使用机器人手臂进行处理物体的实用性和市场性还远未得到证实。在我们的生活环境中使用机器人手臂的困难提出了几个需要解决的问题。安全问题成为最需要考虑的关键因素之一。机器人进入市场需要可靠性问题。必须深入考虑适合家庭环境的设计和控制问题。
尽管目前的家庭服务应用存在技术困难,但移动机器人机器人的研究已经大大增加,以解决上述问题。移动机械手是由两个系统组成的组合结构,即移动机器人和机械臂,从而实现移动和可操作性[5-13]。提出了移动倒立摆系统的平衡控制[14-17]。从工业机器人到服务机器人的转变需要与机器人更直接的互动。机器人和操作者之间的合作任务越来越苛刻。因此,除了位置控制外,还需要力控制来处理移动机械手机器人的接触力[18-22]。
利用扰动观测器[3]对移动机械手在外力作用下的运动进行了控制。移动机械手被开发成与
图1 两个平衡机器人之间的合作概念
人类[21]和移动搬运工携带一个带有人类操作员的物体已经被证明[22]。
在之前的研究中,介绍并实现了机器人工人(Roboker)的第一个模型[23]。罗博克有两个自由度为6度的手臂和一个轴距。然后执行机器人和人类操作员之间的交互控制[24]。
本文给出了一种平衡控制的经验方法,同时也给出了机器人与人、两轮移动机械手在处理物体时的协同交互控制。首先,对机器人在室内航行时的平衡控制进行了测试。其次,以合作的方式实现了两个机器人与一个机器人与一个人之间的对象处理控制。
本文的贡献在于通过实证研究,实现图1所示的两轮机器人之间处理物体的概念。主、从配置适用于两轮机器人,在两轮机器人中,从机配备一个力传感器来调节交互力。此外,将阻抗力控制方法应用到机器人上,由操作者来处理物体。机器人和操作员之间的对象处理任务也在家庭服务应用中演示。
论文的组织结构如下。第2节描述了平衡机器人的建模。第三节介绍了实际机器人,第四节对其进行了控制。实验研究见第5节。
2.机器人模型
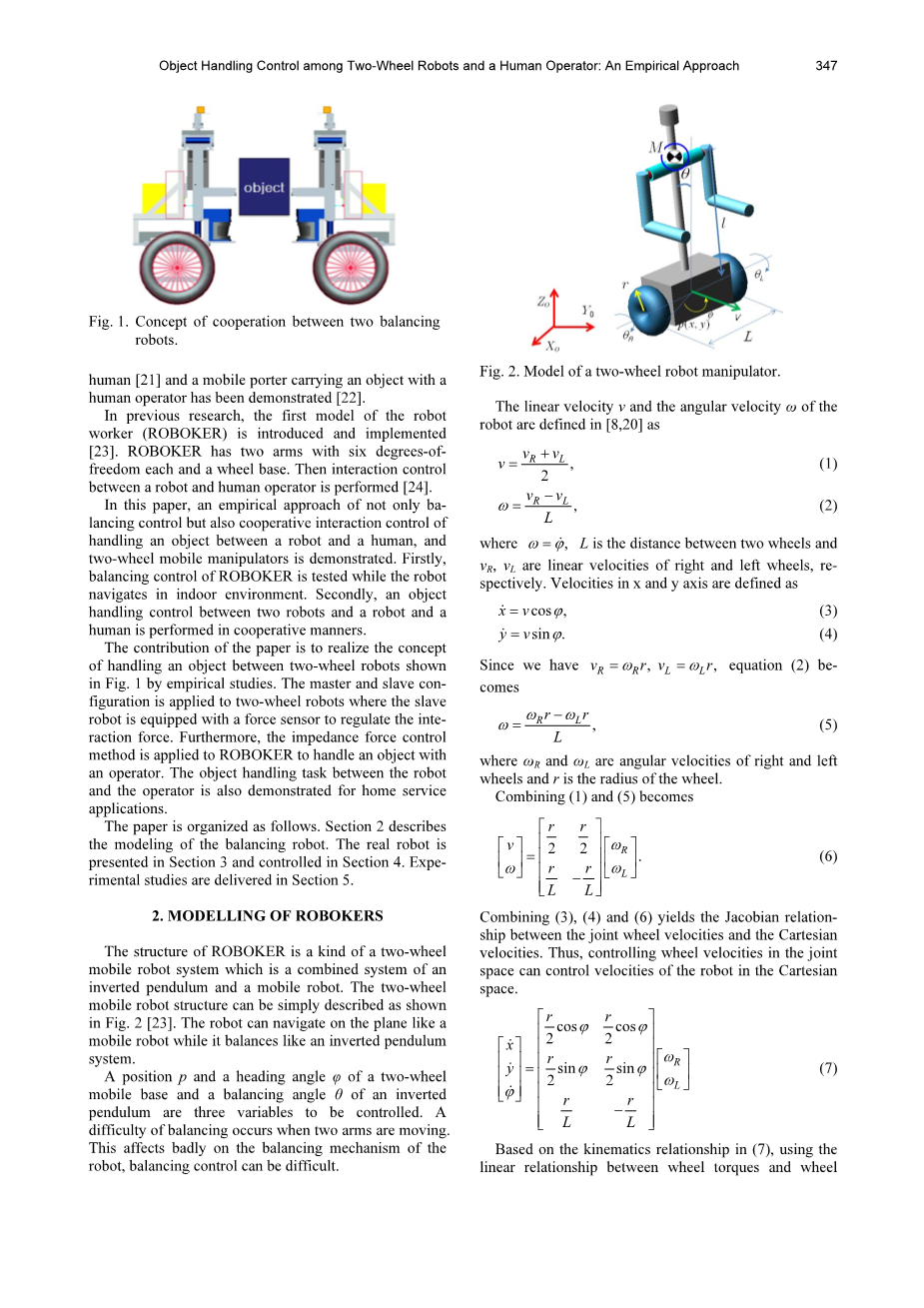
机器人的结构是一种两轮移动机器人系统,它是倒立摆和移动机器人的组合系统。两轮移动机器人结构简单描述如图2[23]所示。当机器人像倒立摆系统一样保持平衡时,它可以像移动机器人一样在飞机上导航。
两轮移动底座的位置P和航向角phi;以及倒立摆的平衡角theta;是三个需要控制的变量。当两个手臂移动时,会出现平衡困难。这严重影响了机器人的平衡机构,平衡控制难度大。
图2 两轮机械手模型
机器人的线速度v和角速度omega;在[8,20]中定义为
式中,omega;_l为两轮之间的距离,vr为左右轮的线速度。x和y轴上的速度定义为
因为我们有vromega;rrvlomega;lr方程(2),所以
式中,omega;r和omega;l是左右车轮的角速度,r是车轮的半径。组合(1)和(5)成为
结合(3)、(4)和(6)得出联合轮速度和笛卡尔速度之间的雅可比关系。因此,在关节空间中控制车轮速度可以控制机器人在笛卡尔空间中的速度。
基于(7)中的运动学关系,利用车轮扭矩与车轮速度之间的线性关系,通过向每个车轮输入扭矩来控制机器人。
3 .机器人
设计并实现了真正的两轮平衡服务机器人,如图3所示。它由一个带两个轮子的底座、一个带两个手臂的上身、一个可伸展的腰部、一个带摄像头的头部和一台计算机组成。力传感器安装在左臂末端。激光传感器位于前部,用于检测障碍物。头部装有立体摄像机。基轮有两个脚轮,以在开始时保持在地面上的稳定接触。脚轮提升机构使脚轮上升,使机器人成为平衡模式。
图3显示了Roboker 1,图4显示了Roboker 2。罗博克1号和2号有一个可伸缩的腰部,这样他们就可以接触到更高的物体。Roboker 2是Roboker系列的一个新版本,它的两个手臂仍在使用中。它有几个新的特点:可伸展的腰部、可分离的身体、可滑动的腰部和可滑动的手臂。
图3 机器人1
图4 机器人2
4. 控制方案
4.1。位置控制方案
对于机器人的位置控制,采用线性控制方法。控制三个控制变量,如平衡角、方向角和位置。平衡角控制采用PD控制方法,方向角控制和位置控制采用PID控制方法[16-20]。每个变量由线性控制器描述如下:
其中utheta;为平衡角控制器输出,uphi;为航向角控制器输出,u p为位置控制器输出,p为机器人中心位置
X和Y平面上的主体,kij是控制器增益。
线性控制器输出的总和是驱动轮的扭矩。右轮的扭矩tau;r和左轮的扭矩tau;l被描述为每个控制输入的总和。
4.2。力控制
由于机器人采用如图5所示的位置回路控制,因此力可以通过外回路控制。通过阻抗函数对感应外力进行滤波,产生修正后的位置和方向。
式中,e p=minus;pd p,etheta;=minus;theta;theta;d,eФ=minus;_d,delta;p和delta;phi;分别为位置和方向校正项。
图5 两轮机器人(Roboker)的位置控制
图6 力控制结构
取(10)和(11)的拉普拉斯变换
力与位置之间(12)的阻抗
关系如下:
其中,mp、bp、kp是阻抗参数。
如果没有外力,那么我们有位置控制,如(8)所示。如果我们有外力,那么位置会根据(12)中的作用力进行修改。
然后通过逆运动学将位置误差转化为机器人所需的关节位置。内部位置回路采用PID控制器进行关节位置控制,外部回路采用力控制。
因此,外力起着改变机器人所需轨迹的作用。操作员的命令力修改了笛卡尔位置,并通过图6所示的反向运动学将其转换为关节值。这形成了基于位置的阻抗控制。
5.实验研究
5.1。实验装置
从机配备JR3力传感器,用于交互式力控制应用。两个机器人都有陀螺传感器来检测平衡控制任务的倾斜角度。控制采样时间设置为100Hz。
表1和表2列出了通过尝试和错误找到的控制器增益值。增益的负符号是因为所需值设置为零,例如平衡角。表3显示了实验研究的阻抗参数。这些数值是通过实证研究得出的。为了抑制振动,在阻抗滤波器之后使用低通滤波器,其时间常数如表3所示。主机器人PID控制参数。
|
|
平衡角 |
航向角 |
位置 |
|
KP |
-150 |
-12 |
300 |
|
KD |
-8 |
-14 |
10 |
|
Ki |
0 |
-0.3 |
1 |
表2。从机PID控制参数。
|
|
平衡角 |
航向角 |
位置 |
|
KP |
-104 |
-5 |
100 |
|
KD |
-5 |
-10 |
5 |
|
Ki |
0 |
-0.3 |
1 |
表3。阻抗参数。
|
|
位置(FZ) |
航向(FY) |
|
米 |
6 |
5 |
|
乙 |
0.01 |
0 |
|
K |
0.1 |
0.1 |
|
拉姆 |
0.9 |
0.8 |
低通滤波器如下:
其中,根据经验得出lambda;,并在表3中给出。
5.2。首先对Roboker1进行平衡控制试验,对Roboker1进行平衡控制试验。实际演示的视频剪辑图像如图7所示,持续20秒。相应的角度和位置数据也绘制在图8中。图8表明平衡角保持在0.01弧度的范围内。相应位置误差约为0.01m。
图7 平衡演示
图8 图7的对应图
5.3。Roboker 1和人之间的对象处理
下一个实验是在机器人保持平衡的情况下,在操作者和机器人之间进行物体处理控制。最初,人类操作员拿着一个盒子,把它推到机器人身上。在与机器人保持接触后,机器人将位置控制切换到力控制,并尝试保持所需的力。力的方向如图9所示。
当操作员通过推拉来控制施加的力时,机器人会做出反应,以保持一个设定为8.5N的所需力。机器人根据人类操作员诱导的命令力来回移动。机器人与操作者之间的实际物体处理控制任务如图10所示。由于操作者施加的力并不总是相同的,所以不可能有相同的结果图,但可以重复相同的实验。
图11显示了机器人位置方向随操作者所受力方向的变化而变化的情况。当操作者改变施力方向时,机器人通过改变位置方向来保持所需的接触力。然后操作员逐渐减小施加的力,在不推动箱子的情况下将箱子掉落,看机器人能否保持稳定的平衡。失去平衡后,机器人成功地保持了平衡。
图9 力方向

英语原文共 8 页
资料编号:[3693]



