大型工件调平机构设计毕业论文
2020-02-19 18:23:45
摘 要
在现代化机械行业中,我们经常需要把一些机械设备的工作平面调整到水平或竖直位置,方便进一步加工或者为了保证机械设备系统的运行精度和测量精度等其他工作性能指标。调平装置是把机械设备工作平面调整到适合使用的水平方位要求的一种机械装置,因为调平是机械加工前最为重要的一步,所以将机械设备调平是保证诸多机械设备正常工作的前提条件。调平机构是调平装置的重要组成部件,调平机构的调平性能在很大程度上影响调平装置的调平性能,所以加大对调平机构的研究具有重要的现实和生产意义。
对于某些大型工件,需要进行局部加工,此时需要对此大型工件进行位置调整,在现场装配过程中,设备的水平调整制约着设备的加工精度。本文主要研究了一种新型的蜗轮蜗杆机构,通过手动调整的方式,快速有效地对大型工件进行调平。
本文以cad和proe绘图软件为基础,结合运动学和力学知识,对大型工件调平机构进行三维建模,对蜗轮蜗杆机构进行运动研究,主要研究蜗轮蜗杆调平机构的工作原理及运动过程。通过研究蜗轮蜗杆调平机构的运动过程,我们能认识了解其工作原理和工作过程。
研究结果表明:这种新型的蜗轮蜗杆调平机构可以达到较高的调整精度,有效提高工作效率。
关键词:调平机构;手动调整;蜗轮;蜗杆
Abstract
In the modern machinery industry, we often need to adjust the working plane of some mechanical equipment to the horizontal or vertical position to facilitate further processing or to ensure the operation accuracy and measurement accuracy of the mechanical equipment system and other performance indicators. Leveling device is a kind of mechanical device that adjusts the working plane of mechanical equipment to the requirement of suitable horizontal orientation. Because leveling is the most important step before machining, leveling of mechanical equipment is the precondition to ensure the normal operation of many mechanical equipment. Leveling mechanism is an important component of the leveling device. The leveling performance of the leveling mechanism greatly affects the leveling performance of the leveling device. Therefore, it is of great practical and productive significance to strengthen the research on the leveling mechanism.
For some large workpieces, local processing is needed. At this time, the position of the large workpiece needs to be adjusted. In the field assembly process, the level adjustment of the equipment restricts the processing accuracy of the equipment. This paper mainly studies a new type of worm gear and worm mechanism, which can adjust large workpiece quickly and effectively by manual adjustment.
In this paper, based on CAD and proe drawing software, combined with kinematics and mechanics knowledge, three-dimensional modeling of large workpiece leveling mechanism is carried out, and the motion of worm gear and worm mechanism is studied. The working principle and motion process of worm gear and worm leveling mechanism are mainly studied. By studying the motion process of worm gear and worm leveling mechanism, we can understand its working principle and process.
The results show that this new type of adjusting mechanism can achieve higher adjusting accuracy and improve working efficiency.
Key Words:Leveling mechanism;Manual adjustment;Worm gear;Worm
目录
摘 要 I
Abstract II
第1章 绪论 2
1.1 课题研究背景及意义 2
1.1.1国内外研究现状 2
1.1.2课题研究意义 2
1.2 研究内容 3
第2章 水平方向调节机构设计 4
2.1调节机构的介绍 4
2.2水平左右调节机构的分析选用 4
第3章 竖直方向调节机构设计 6
3.1蜗轮蜗杆机构的分析 6
3.2蜗轮蜗杆的设计及参数的计算 6
3.3蜗杆传动的设计计算 7
3.3.1蜗轮齿面接触疲劳强度的校核计算 7
3.3.2蜗杆的刚度校核计算 8
3.4蜗杆传动的失效形式和材料选择 8
3.5丝杠的材料选择和热处理的选择 9
第4章 大型工件调平机构三维模型设计 11
4.1三维零件模型的建立 11
4.2三维机构的构建 11
第5章 其他零件的分析 13
5.1轴承的选用及校核 13
5.2手轮尺寸设计及材料的选择 13
结论 14
参考文献 15
致谢 16
第1章 绪论
1.1 课题研究背景及意义
1.1.1国内外研究现状
目前,国内外存在的调平系统是多种多样的。生活日常中我们常见的有高空作业车平台的调平、零件加工平台的调平以及数控卧式铣床的调平等。这些调平系统大多是用来调整一个工作平台的位置,对于工件的调平涉及不多。最初的调平系统是依靠人工驱动的,然后依靠液压系统驱动,发展到现在大多采用机电驱动。最初调平系统是依靠手动操作的,随着社会科学的发展过渡到半自动操作,最后过渡到自动操作。
最早调平系统的支撑方式是三点支撑,慢慢发展为四点支撑,六点支撑以及八点支撑等。在这么多种支撑方式中,三点支撑最容易实现,但稳定性差。四点、六点支撑稳定性好,但存在静不定问题,容易产生虚腿问题。同时静不定次数越高,系统越复杂,越不利于调平。
调平系统一般包括两个部分:水平方向的调平和竖直方向的调平,将需要调节的工件转化为两个方向的调平再加以组合,就可以达到我们的目的。例如楔铁式调平机构,在将下滑动块进行水平方向调整的同时,会带动上、下滑块之间的摩擦滑动,从而使上滑块可以再竖直方向进行调整,即达到了同时进行水平方向和竖直方向调整的目的。
而对于平台的调平,一般是在平台上安装两个角度传感器,x轴和y轴方向各安装一个,通过测量x轴和y轴方向角度的偏差,可以根据测得的偏差来控制对应部位的支腿伸出或缩回,最终使得角度满足我们的要求。
1.1.2课题研究意义
在现代化工业中,时常需要把某些设备的工作平面调整到水平或竖直位置,从而保证设备系统的运行精度、测量精度等其他工作性能指标。调平装置是把试验设备工作平面的水平调整到适合使用要求的一种装置,而确定工作平面的正确是保证许多设备正常工作的前提条件。例如数控铣床的加工,数控铣床是一种用电子信号控制车刀加工工件的机床,是一种智能化的机床。数控铣床的优点是智能化,操作便捷,精度高而且加工效率高。由于对加工精度有较高的要求,因此数控铣床的车刀在执行对刀等操作时,就得保证足够的精度。如果在对刀等操作时精度不达标,在后续的生产中,生产出来的产品精度也是不符合要求的。因此,调平机构的研究具有重要的现实意义。
针对本次毕业设计,我们研究设计了一种手动的调整机构,由于机构简单,调整方便,所以调平效率较高,同时制造成本也低,可以降低设备工件的加工成本。
1.2 研究内容
本论文需研究设计一种新型的调整机构,使能够达到较高的调整精度,同时提高工作效率。对于一类大型工件的调平,我们一样可以采取将调平转化为水平方向调节和竖直方向调节两部分,通过分别实现两部分的功能来达到我们调平的目的。竖直方向调节的机构选取的是蜗轮蜗杆机构,具体调节方法是将工件放置在蜗轮蜗杆升降机构的法兰平台上,然后通过转动手轮,带动蜗杆的旋转,通过蜗杆的旋转驱动蜗轮的旋转,带动丝杠的旋转上升和下降,进而带动法兰位置的变化。即通过对法兰位置的调整,可以达到对大型工件竖直方向调节的目的。
水平方向调节的机构可以选取直线运动导轨机构,直线运动导轨机构的特点是精度高,同时操作调整方便。直线运动导轨机构上放置滑块,滑块上布置平台,平台上放置我们用于调节工件竖直方向的蜗轮蜗杆机构。平台右侧连接有丝杠螺母机构,通过调整右侧丝杠的旋转移动,推动平台及滑块的移动,从而达到调整工件水平方向的要求。
本文以cad和proe绘图软件为基础,结合运动学和力学知识,对大型工件调平机构进行二维图的绘制和三维图形的建模,对蜗轮蜗杆机构运动进行研究,主要研究蜗轮蜗杆调平机构的工作原理及其运动过程。
第2章 水平方向调节机构设计
2.1调节机构的介绍
水平左右调节机构平常使用较多的是传动机构,而传动机构有丝杠螺母传动机构以及直线运动导轨机构这两种。
直线运动导轨的摩擦方式是滚动摩擦,滚动摩擦的特点是动摩擦力和静摩擦力差距小,不会打滑。滚动摩擦同时减少了材料的磨损,使得调节机构的使用寿命增加。直线运动导轨机构由于操作方便且精度高, 所以很适合作为水平方向调节机构。
本次水平调节机构的选用为直线运动导轨机构,导轨为卧式导轨,且有两根导轨,在两根导轨上,一共放置了四个滑块,滑块上固定了一个平台,用于放置竖直方向的调节机构。这部分整体有一个支座,支座上铺设直线运动导轨机构的两根导轨,滑块和平台置于导轨上。在平台的右侧连接有丝杠螺母机构,丝杠的右侧穿过支座。设计的水平方向调整方法就是旋转移动丝杠,带动平台及滑块的左右移动,由于竖直方向的升降机构是固定在平台上面的,因此大型工件的水平方向的调节就可以转化为平台及滑块这一整体的水平调节。
而丝杠螺母机构传动的机构有滚珠丝杠和梯形丝杠两类,滚珠丝杠螺母机构复杂且制造成本高,而梯形丝杠螺母机构结构简单,并且具有自锁功能,很适合在本次设计中使用,故选用梯形丝杠螺母机构。
2.2水平左右调节机构的分析选用
由于大型工件的重量在10t左右,因此直线运动导轨机构需要能够承受足够大的负载,故最终选择的直线运动导轨型号为LG55ZL,丝杠的长度为200mm,梯形螺纹型号选用为Tr204。水平调整机构见图如下图所示:
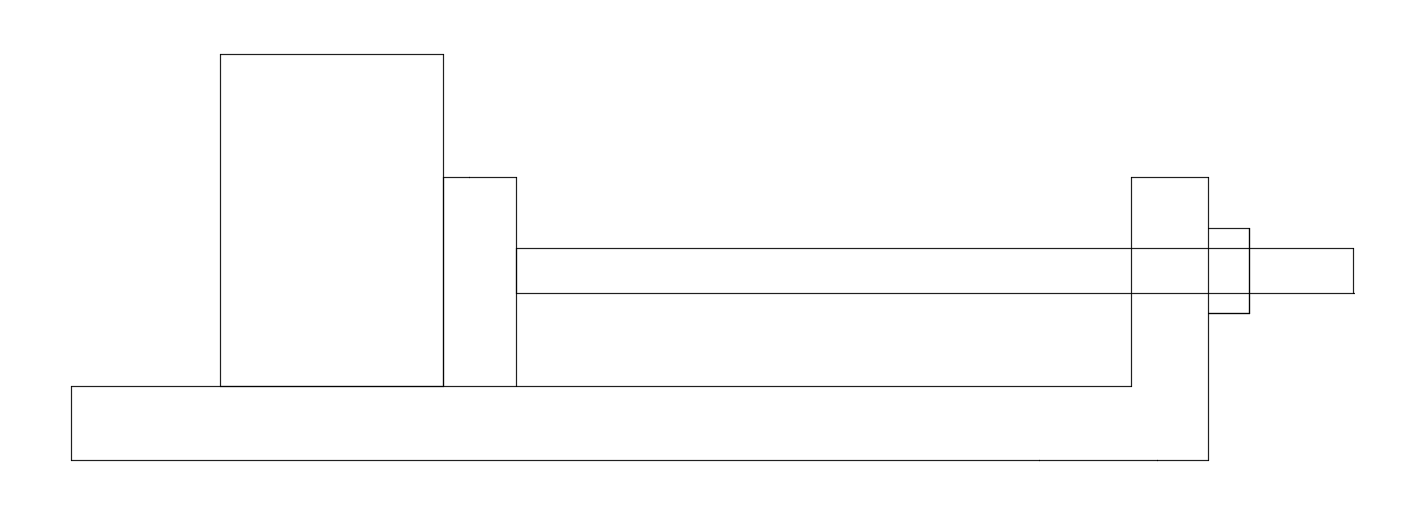
图1:水平调整机构简图
根据其工作原理,我们首先需要确定蜗轮蜗杆升降机和水平调节机构的接触面积,即滑块的面积。整个工件的重量大约是10t,水平调平机构的垂直负载是10t,为了避免比压过大而使滑块与支座平面间因咬合而不能均匀滑行,所以设计的比压值小于所用材料屈服极限的1/20,根据计算公式:
<
式中:为垂直负载100000N
S为接触面积
为材料屈服强度,45钢正火处理的屈服强度为270MPa
计算求得=74061,因此设计的平台为300300mm的矩形,材料为45钢正火而成。
第3章 竖直方向调节机构设计
根据设计题目的要求:本调平机构为手动调平机构,由于蜗轮蜗杆传动机构传动平稳,抗振动,工作噪音少,所以适合采用蜗轮蜗杆传动机构作为本次毕业设计的调平机构。
3.1蜗轮蜗杆机构的分析
蜗杆传动是一种传递运动和转矩的机构,蜗杆传动优点很多,比如结构紧凑,传动比大,传动平稳,工作噪音少,抗振动,并且反行程具有自锁性。蜗杆传动的缺点是摩擦产生的热量较多,效率没有齿轮传动高,一般适合用于对功率要求不高的场合。
3.2蜗轮蜗杆的设计及参数的计算
在蜗杆传动设计时,蜗杆传动中主要的参数有模数,压力角,蜗杆头数,蜗轮齿数,蜗杆分度圆直径,蜗杆直径系数,蜗杆分度圆柱导程角等,我们需要合理设计这些参数。
蜗杆头数及蜗轮齿数
蜗杆头数一般取值1~4,蜗杆头数较多时可以提高蜗杆传动的效率。由于本次毕业设计中蜗杆传动效率最好高一些,所以蜗杆头数取值为1。蜗轮齿数的选择并不是随意的,有一个合适的取值范围,当蜗轮齿数≥17时,可以避免零件在加工时产生根切,当蜗轮齿数<26时,蜗杆传动的平稳性会受到一定的影响;当≥30时,可以一直保持蜗轮和蜗杆有两对以上的齿啮合。同时对于动力传动系统,过多的蜗轮齿数会相应的增大蜗轮的尺寸,这会使得蜗杆的跨距增大,进而蜗杆的弯曲刚度会降低,所以蜗轮齿数一般不大于80.综上所述,本次毕业设计中蜗杆头数取值为1,蜗轮齿数取值为29,这样可以得到蜗轮蜗杆机构的传动比为29。由于是手动调平机构,所以蜗杆和蜗轮的转速都不会很高,初步选定蜗杆转速=29r/min,则蜗轮的转速===1r/min。人工的平均输出功率约为P=100W,蜗轮蜗杆的啮合效率=0.8,蜗轮材料的许用接触应力=180MPa。
蜗轮轴转矩:=9.55=9.55=7.64Nmm
载荷系数:因为工件载荷平稳,同时蜗轮的转速并不高,所以取值K=1.1
根据公式≥K=1.17.64=7106
因此模数和蜗杆分度圆直径的取值根据《机械原理与机械设计》表3-1取得标准值,分别为:模数m=10mm,蜗杆分度圆直径=90mm。
计算相对滑动速度和传动效率
蜗杆导程角===5.08°
蜗杆分度圆的圆周速度===0.137m/s
根据《机械原理与机械设计》表3-10当量摩擦角取=1.5°
校核啮合效率===0.77与初次取值相近,因此传动总效率=0.96=0.960.77=0.74
蜗轮分度圆直径=m=829=232mm
为了便于选择配套的蜗轮和蜗杆,需要对蜗杆分度圆直径进行规范化取值,蜗杆分度圆直径与模数m 的比值称为蜗杆直径系数q。
由模数m的取值选取对应的蜗杆的分度圆直径=90mm,此时直径系数q=9.0。
蜗杆分度圆柱导程角:在蜗杆直径系数q和头数选定之后,就可以根据公式确定分度圆柱导程角的值,=,得出分度圆柱导程角的值为5.08°。
梯形丝杠抗压强度校核:公称直径45mm,基本导程为7.85mm,由于梯形丝杠的材料为HT200,这种材料的抗压强度为750N/mm。本次毕业设计的工件重量在10t以内,假设丝杠承受全部工件的力,即100KN,丝杠受力面积计算公式为S=π,计算得出受力面积1590,抗压强度校核公式为=,经计算得出受压强度为62.9N/mm<750N/mm,所以丝杠材料的抗压强度符合要求。
3.3蜗杆传动的设计计算
因为蜗轮蜗杆传动的失效一般发生在蜗轮上,所以只需进行蜗轮轮齿的强度校核计算。蜗杆的强度可按轴的强度计算方法进行,必要时还要进行蜗杆的刚度校核。
一般情况下,对于闭式蜗杆传动,只需按齿面接触疲劳强度进行设计,而无需校核蜗轮轮齿的弯曲强度。
3.3.1蜗轮齿面接触疲劳强度的校核计算
由于阿基米德圆柱蜗杆传动可近似地看作齿条和齿轮的啮合传动,因此一般普通圆柱蜗杆传动的蜗轮齿面的接触疲劳强度计算与斜齿圆柱齿轮传动相似,仍以赫兹公式为原始公式,并按节点啮合的条件进行计算。即
=
式中:
- 为齿面接触线单位长度上的计算载荷
- 为综合曲率半径
- 为弹性系数,取
- ,=,K为载荷系数,因为蜗杆传动平稳,所以取K=1.0;L为接触线长度,
- 经计算得出蜗轮齿面的接触疲劳强度= 170MPa<满足要求
3.3.2蜗杆的刚度校核计算
蜗杆受力后,如果变形过大,将会影响蜗杆和蜗轮的正确啮合,因此需要对蜗杆进行刚度校核计算。通常将蜗杆的螺旋部分看作以齿根圆直径为直径的轴段,主要是校核弯曲刚度。其最大弯曲挠度 y可按下式作近似计算:
y=≤[y]
式中:
为所受的圆周力和径向力
E为蜗杆材料的弹性模量,
为杆两端支承间的跨距
[y]为最大需用挠度
蜗杆传动的相对滑动速度和传动效率
蜗杆导程角==5.08°
蜗杆分度圆的圆周速度
==0.137m/s
当量摩擦角取
啮合效率=0.77
传动总效率=0.74
经计算y==0.08 ≤0.09满足要求
3.4蜗杆传动的失效形式和材料选择
蜗杆传动的失效形式一般是胶合、点蚀和磨损。而因为蜗轮材料和结构上的原因,在一般情况下,失效多发生在蜗轮上。在本次设计中,蜗轮主要会出现的失效形式是胶合。
蜗杆、蜗轮材料的选择首先应满足强度要求,同时针对蜗杆传动的主要失效形式,蜗杆、蜗轮的材料组合应具有良好的减摩和耐磨性能。
蜗杆材料一般选用碳素钢或合金钢,并采用适当的热处理。具体材料选择参考下图2



