汽车构件焊接机器人工作站建模与运动仿真毕业论文
2020-02-17 17:10:38
摘 要
随着时代的进步与技术的发展,焊接机器人工作站对汽车工业生产的帮助越来越大。焊接机器人工作站可以弥补传统手工焊接精度差、人工成本高等缺陷,不仅可以全面提高汽车工业生产产品的焊接质量还可以降低产品生产成本。国外焊接机器人工作站发展比较成熟,拥有许多成熟的技术和完整的机器人生产线,然而国内焊接机器人工作站在技术方面有许多不成熟的地方。
本次研究的焊接机器人工作站主要由焊接机器人,焊接设备,安全防护设备以及其他辅助设备组成,主要用于完成车辆油箱部件的自动化焊接工作。
本次研究选择304L不锈钢作为被焊油箱的材料,并根据所选材料的特性选择相对应的焊接工艺参数。在将焊接机器人工作站数学模型导入ADAMS软件之后,根据所选择的焊接工艺参数进行设置,同时设置被焊油箱的材料等等。最后根据装配关系在ADAMS软件中添加各类运动副进行运动学仿真建模。
完成运动学仿真建模之后,进行路径规划,首先完成了焊接机器人工作范围的检测并仿真了实际焊接工作的过程。完成仿真之后分析仿真结果,检验焊接工作过程是否存在运动干涉、焊接过程是否合理。还通过函数控制实现了焊接速度的控制以及引弧等复杂焊接动作的仿真。最后尝试利用逆运动学分析尝试实现更复杂的轨迹规划。
关键词:焊接机器人工作站;轨迹规划;运动学分析
Abstract
With the advancement of the times and the development of technology, the application of welding robot workstations is becoming more and more important for the production of the automobile industry. The welding robot workstation can make up for the defects of traditional manual welding like bad welding precision and high labor cost, which can improve the quality of the products produced by the automobile industry and reduce the production cost. The development of welding robot workstations abroad is relatively mature, with many mature technologies and complete robot production lines. However, there are many immature places in the domestic welding robot workstations.
The welding robot workstation of this research is mainly composed of welding robot, welding equipment, safety protection equipment and other auxiliary equipment, and is mainly used for the automatic welding work of vehicle fuel tank components.
In this study, 304L stainless steel was selected as the material of the welded oil tank, and the corresponding welding process parameters were selected according to the characteristics of the selected materials. After the mathematical model of the welding robot workstation is imported into the ADAMS software, the setting is performed according to the selected welding process parameters, and the material of the welded oil tank is set at the same time. Finally, the kinematics simulation modeling is carried out in the ADAMS software according to the special relationship.
After completing the kinematics simulation modeling, the path planning is carried out, the welding robot working range is detected and the welding work process is simulated. After the simulation is completed, the simulation results are analyzed to check whether there is motion interference during the welding work and whether the welding process is reasonable. The control of welding speed and the simulation of complex welding actions such as arc ignition are also realized through function control. Finally, attempts to use inverse kinematics analysis to try to achieve more complex trajectory planning.
Key words: welding robot workstation; trajectory planning; kinematics analysis
目录
第1章 引言 1
1.1研究背景 1
1.2国内外研究现状 1
1.3研究意义 2
第2章 焊接机器人工作站结构 3
2.1焊接机器人工作站总体结构 3
2.2焊接机器人结构 4
2.3本章小结 4
第3章 焊接机器人工作站仿真模型建立 5
3.1焊接参数选择 5
3.1.1油箱材料选择 5
3.1.2焊接工艺参数的选择 5
3.1.3 GTAW焊接介绍 6
3.2建模仿真环境 6
3.2.1 软件介绍 6
3.2.2实体模型导入 6
3.3ADAMS运动学仿真模型建模 7
3.3.1 运动学仿真一般步骤 7
3.3.2 工作环境设置 7
3.3.3 模型检验 9
3.4本章小结 9
第4章 ADAMS运动学仿真分析 10
4.1 焊接机器人工作站工作范围仿真分析 10
4.1.1分析的意义 10
4.1.2仿真准备 10
4.1.3仿真结果及分析 11
4.2焊接机器人工作路径规划及焊接过程仿真 12
4.2.1轨迹规划概述 12
4.2.2仿真准备 13
4.2.3利用step函数作为驱动函数 14
4.2.4 利用STEP函数控制焊接速度 15
4.2.5利用if函数控制焊接速度 15
4.2.6 关节转角测量 17
4.3引弧动作仿真 17
4.4在关节空间进行轨迹规划 20
4.4.1关节转角与时间关系方程 20
4.4.2利用运动学逆解实现路径规划 20
4.5本章小结 20
第5章 结论 23
参考文献 24
致谢 25
第1章 引言
1.1研究背景
焊接机器人的发展已经有了很长一段历史,从第一台Unimate型机器人在美国问世至今已经四十五年了,在这短短的几十年时间内机器人技术的发展速度可以说是十分可观。现阶段,各种类型的机器人已经各行各业大规模应用,这些机器人主要用于进行各种复杂作业比如焊接、装配、搬运等等。早期的机器人必须根据实际作业的条件规划焊接路径和设置焊接参数,存在很大的局限性缺乏“柔性”[1]。随着技术的更新换代,焊接机器人逐渐转变为以智能化为核心技术的多传感的柔性加工系统而不再是原始的单机示教型机器人。机器人主要有分为两类对应两种应用方式,一是机器人工作单元,二是机器人的自动化生产流水线即所谓的机器人工作站,而后者在国外已经成为机器人的主要应用方式[2-3]。
常见的焊接机器人工作站一般由机器人系统、焊接系统、安全防护系统以及其他辅助设备系统组成。由于焊接方式的不同,焊接机器人工作站主要分为点焊工作站和弧焊工作站[4-5]。
1.2国内外研究现状
国外有许多知名的焊接机器人企业比如日本的Motoman、德国的KUKA等公司,这些企业在当地早已成为支柱性企业带动了一方经济,而日本现阶段已经装备在线的机器人数量高达五十万台,几乎占据世界装备机器人总量的半壁江山,所以日本被行内人士称为“机器人王国”。反观国内,由于焊接机器人事业的起步相对发达国家晚很多,装备有焊接机械手仅千台,最近两年的两年内,每年新应用的机器人的数量少于150台,国内的发展情况不容乐观。虽然国内生产的桑塔纳、别克等汽车部分零部件的生产已经利用焊接机器人替代了传统的冲压焊接,提高了焊接质量,减少了劳动强度。
国内对焊接机器人工作站的研究也已经有了相对成熟的研究.上汽通用五菱使用工业机器人焊接商用车门框,并应用了日本FANUC公司为他们研发的Roboguide离线编程软件[5]。李芳等设计一个汽车纵梁点焊机器人工作站,这个机器人工作站由各种控制系统组成,其中焊接机器人的各类关节一共有六个,控制六个自由度[7]。
箱型结构的焊接一般用到移动式现场焊接机器人,主要分为轨道式和无轨式两类。清华大学研发的箱型钢结构柱或梁焊接机器人系统采用立式轨道,轨道与箱型钢结构之间采用磁吸附连接[8-9]。李林贺、杨春宇研究发现以往手工焊接很难保证所焊接的防撞杆组件的定位精度,且焊接效果不一致,生产效率低下,故研制开发了防撞杆焊接工作站来满足车厂日益增加的要求[10]。
在国外Lope,T. C和 Sikora,C. G. S.等根据巴西里蒂巴教区的一个真实的汽车厂研究了机器人点焊的平衡问题,采用整数线性规划技术建立模型来平衡42台机器焊接700多焊点以提高效率[11]。 Kahan,T和Bukchin,Y等争对机器人故障情况开发了一个焊接重新分配策略并确保对吞吐量影响最小[12]。Liu Y. 和 Zhang Y提出ANFIS模型来模拟人的内在非线性和时变特征用于研究人体机器人协同控制中人体手臂运动的精确控制焊工回应并提出了一种基于模型的预测控制算法和解析方法[13]。
Michalos, G提出了一种包括移动设备在内的装配系统的设计和操作方法机器人,它基于表示机器人/资源技能以及操作的语义模型,该方法可以在系统中实现将操作分配给适当的机器人资源,还可以生成无碰撞路径装配系统机器人借助仿真[14]。Carlson, J.S.等提出了一种新的质量方法和基于系统搜索算法的吞吐量优化来优化机器人与焊接之间焊缝的分布序列以提高产品尺寸质量和产量[15]。
1.3研究意义
毫无疑问,大规模使用焊接机器人工作会给汽车工业生产带来有很大的优势。传统汽车生产制造中焊接件主要依靠手工夹具、手工焊接来完成,这样不仅工作效率低,产品稳定性差,且随着人工成本逐年增长,焊接的成本越来越大,产品难以适应市场。在这种背景下,需要应用焊接机器人工作站对汽车部件进行焊接以提高产品质量和降低生产成本。然而焊接机器人工作站依然存在很大的局限性,目前国内焊接机器人工作站产业依旧不够成熟,大多机器人需要依托国外的先进技术且缺少专业的操作人员,无论式设备成本还是人工成本都比较高,所以国内焊接机器人工作站的应用规模不理想[5]。国内的焊接机器人在超大型构件、复杂构件的焊接上存在较大的缺陷,如何保证复杂薄壁构件的焊接质量也一直是个难题,如果仅仅只期望于引进国外的先进技术,不仅高昂的成本影响产品竞争力,而且国外的技术未必适合国内的实际生产情况。所以本项目旨在实地考察,设计出适用于企业生产实际的焊接机器人工作站,解决生产实际中的焊接难题。
本项目的选题与企业的生产实际联系密切,需要通过实地来考察生产线的情况来辅助工作站的建模,同时借助多个软件进行建模和仿真。研究结果对于提升焊接装备自动化水平具有一定的参考借鉴意义。
第2章 焊接机器人工作站结构
2.1焊接机器人工作站总体结构
送丝支架
送丝桶
L型变位机
机器人底座
IRB2006
型焊接机器人
被焊油箱
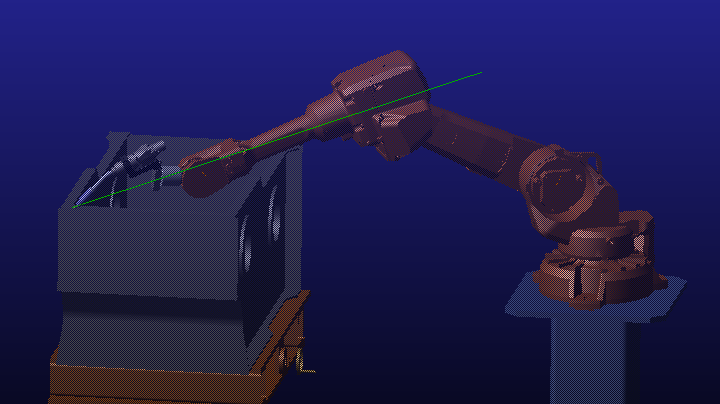
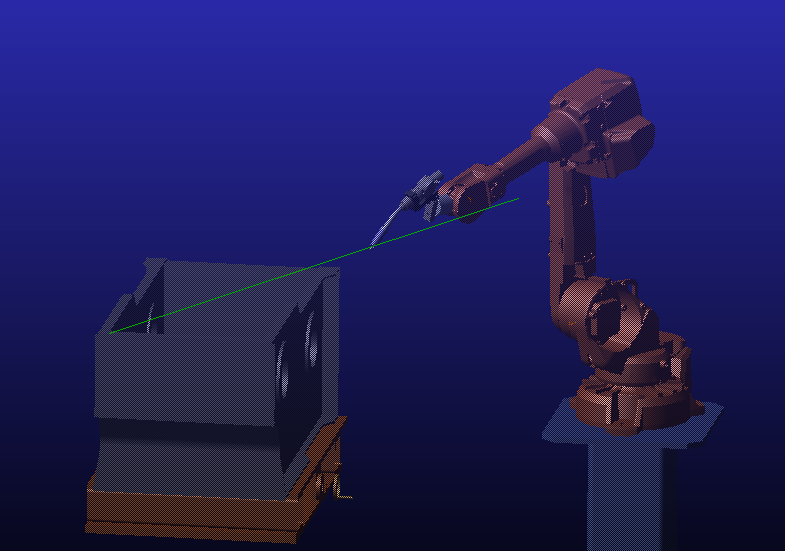
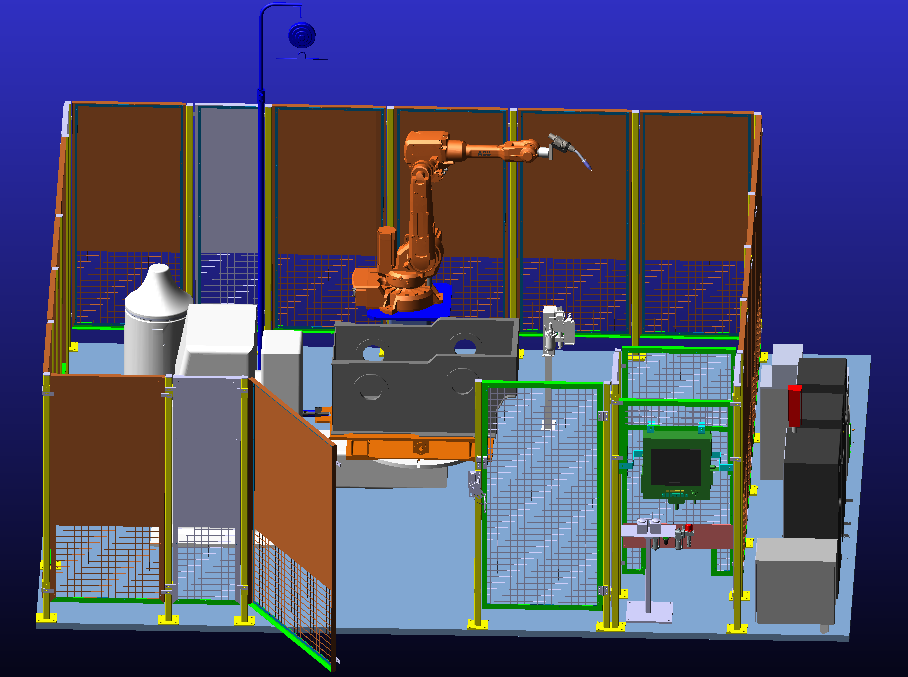
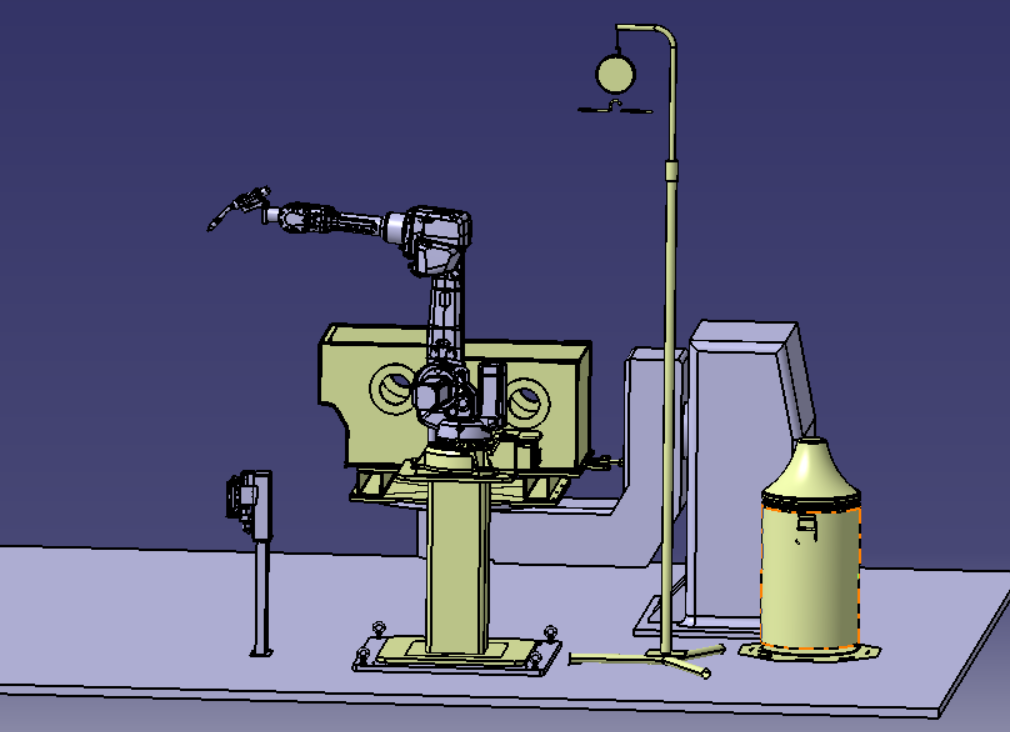 图2.1 机器人工作站总体布置
图2.1 机器人工作站总体布置
本次研究的焊接机器人工作站比较复杂由多个不同的部分组成,主要有IRB2006型焊接机器人,被焊油箱,机器人底座,L型变位机以及由送丝桶与送丝支架组成的送丝机构,此外图上还省略了外围的控制柜和栏杆。工作站的主体包括焊接系统、机器人系统、支撑系统、安全防护系统以及其他各项辅助设备系统。
机器人系统:此焊接机器人工作站的焊接机器人选用的型号是IRB2006型,在焊接机器人上装配焊枪,利用机器人带动焊枪进行移动来完成焊接动作。通过规划焊接机器人的运动路径来实现焊接顺序、焊接速度、焊接路径的调整。
焊接系统:焊接机器人工作站的焊接系统包括焊接机器人、送丝支架、送丝桶等设备,其中送丝桶与送丝支架以及其他部件构成送丝系统。焊丝储存在送丝桶,送丝支架的作用是将焊丝运送到机器人上的焊枪中。
支撑系统:主要包括机器人底座和L型变位机,其中机器人底座与地面固定,与机械手也固定在一起,用于给机器人工作提供有个支撑。L型变位机用于放置被焊油箱,不仅可以用于油箱的固定与支撑,还可以小范围内调节油箱的位置以方便焊接工作的展开。其中L型变位机用于带动工件的移动与旋转以方便焊接加工。
安全防护系统:由外围的围栏,控制柜等组成,主要用于将外界干扰与机器人工作环境隔离,同时方便技术人员可以在围栏外远程控制机器人工作。
2.2焊接机器人结构
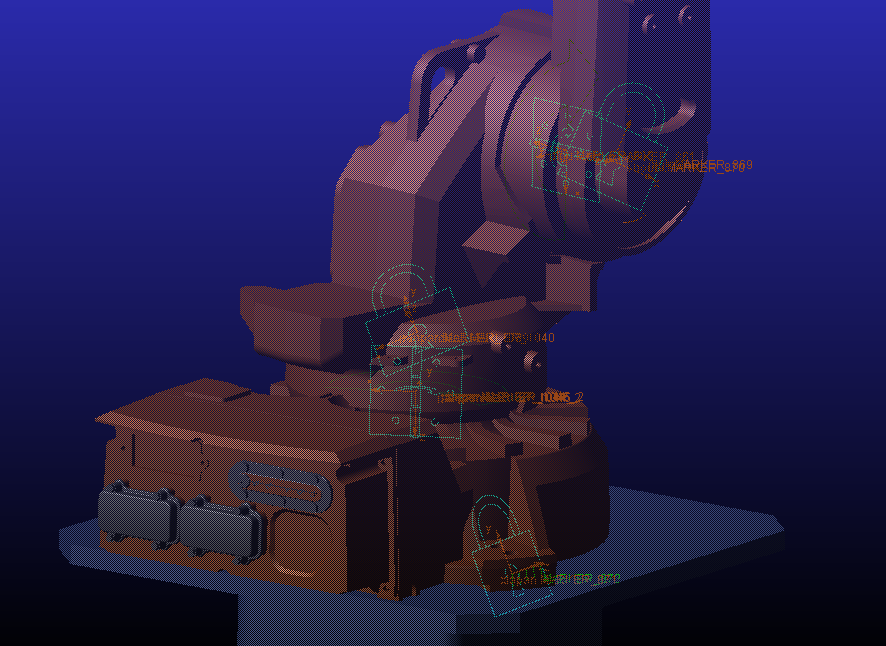
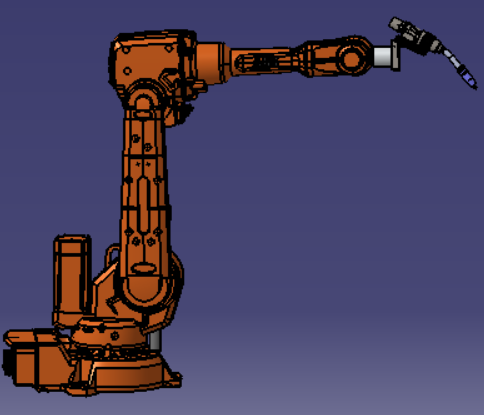 图2.2 焊接机器人结构图
图2.2 焊接机器人结构图
这款机器人主要包括机座,回转部分,下臂、上臂、手腕后部与手腕前部等六个部分,其中在机座与回转部分之间,回转部分与下臂之间,下臂与上臂之间,上臂与手腕之间都存在这可以转动的关节,即这款机器人为四自由度焊接机器人,后续会根据其装配关系以及运动关系在软件中添加相对应的约束条件。
2.3本章小结
本章阐述了焊接机器人工作站的总体结构组成,各部分组成多个系统,不同的系统有不同的功能,其中机器人系统与焊接系统是工作站的核心,也是这次研究的重点研究对象。
第3章 焊接机器人工作站仿真模型建立
3.1焊接参数选择
3.1.1油箱材料选择
现阶段,汽车燃油箱的材料主要有塑料,钢材,铝材三种,铝材由于其自身焊接的困难性应用相对较少,现阶段汽车燃油箱的主要竞争者便是钢材和塑料,而在国内轿车用燃油箱有37%使用钢制油箱,而载货车上使用的燃油箱几乎都是钢制的。所以本次研究的主要对象是钢制燃油箱[16]。
市场上的钢制油箱一般分为低碳钢和不锈钢两类,其中不锈钢主要使用的是奥氏体不锈钢和铁素体不锈钢,而在奥氏体不锈钢中304L奥氏体不锈钢因其良好的性能使用十分广泛,304L不锈钢的耐腐蚀性能十分出色,在低温条件下依旧可以保证良好的性能,而它出色的焊接性使它广泛应用于液化天然气、石油化工等领域,所以304L不锈钢比较适合作为被焊油箱的材料[17]。所以焊油箱材料的选择为304L不锈钢。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:

![D~Y3I6TL84ID3F%}9KV]BQJ](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw7767_2020217171035218.png)