无人驾驶智能车转向系统设计毕业论文
2020-02-17 11:09:36
摘 要
随着互联网技术在各行各业蓬勃发展,无人驾驶技术正成为全球顶尖设计师想要拿下的桂冠。然而,目前无人驾驶技术的研究遇到许多瓶颈,无人驾驶转向系统的设计是其中最关键的部分之一。
本文介绍了一个无人驾驶智能车的转向系统设计过程,这种转向系统分为两大块。其中,控制部分是利用传感器、数据采集系统和车载电脑完成道路信息采集和决策,并将指令输送给机械操纵机构实现自主转向。机械部分是以电机为动力源,通过齿轮传动,带动齿轮齿条式转向器运作,随之带动转向轴等操纵机构转动。本文首先分析了国内外无人驾驶转向系统的研究现状,根据相关资料明确了设计技术路线,然后据此确定了控制部分的大体方案,具体设计了转向器类型和计算了齿轮齿条的具体参数、进行了转向梯形的基本优化、完成了操纵机构防伤和电机设计等工作,最后在一些必要的部分完成了相关零件的应力校核等工作。
关键词:无人驾驶;转向系统;齿轮齿条式转向器;转向梯形优化
Abstract
With the rapid development of Internet technology in all walks of life, driverless technology is becoming the crown of the world's top designers. However, the current research on driverless technology has encountered many bottlenecks, and the design of the driverless steering system is one of the most critical parts.
This paper introduces the steering system design process of an unmanned smart car, which is divided into two large blocks. Among them, the control part uses the sensor, the data acquisition system and the on-board computer to complete the road information collection and decision-making, and delivers the command to the mechanical control mechanism to realize the autonomous steering. The mechanical part is based on the motor as the power source. Through the gear transmission, the rack and pinion steering gear is driven to operate, and then the steering mechanism such as the steering shaft is driven to rotate. This paper first analyzes the research status of the unmanned steering system at home and abroad, and clarifies the design technical route based on the relevant data. Then, based on this, the general scheme of the control part is determined, and the steering gear type and the specific parameters of the rack and pinion are calculated. The basic optimization of the steering trapezoid was carried out, the anti-injury of the operating mechanism and the motor design were completed, and finally the stress check of the relevant parts was completed in some necessary parts.
Keywords: driverless; steering system; rack and pinion steering; steering trapezoidal optimization
目 录
第一章 绪论 1
1.1国外研究现状分析 1
1.2国内研究现状分析 2
1.3研究目的及意义 2
第二章 转向系统技术方案 4
2.1转向系统简述 4
2.2无人驾驶转向系统设计方法 4
2.3转向系统相关参数确定 4
2.4转向系统技术方案选定 5
第三章 转向器的设计 7
3.1确定转向器类型 7
3.2齿轮齿条转向器基本设计 8
3.2.1输入输出形式 8
3.2.2齿轮齿条形式选择 8
3.2.3布置形式 9
3.3转向器具体参数设计 9
3.3.1转向系统载荷和传动比计算 9
3.3.2齿轮齿条机构设计要求 10
3.3.3齿轮齿条具体参数设计 11
3.3.4 转向器校核 13
第四章 转向传动机构 15
4.1概述 15
4.2阿克曼条件 15
4.3确定优化的目标函数 16
4.3.1约束条件 17
4.3.2函数优化结果 17
4.4转向传动机构部件的设计 17
4.4.1球头销 17
4.4.2转向横拉杆 18
第五章 操纵机构 19
第六章 电机及相关件设计 20
6.1电机布置位置 20
6.2电机选型 20
6.3电机齿轮参数 21
6.4分离器设计 21
结论 23
参考文献 24
致谢 25
第一章 绪论
无人驾驶汽车是指通过车载传感系统感知道路环境,自动规划行车路线并控制车辆达到预定目标的智能汽车。无人驾驶汽车的研究早在20世纪50年代西方国家已经开始涉足,并取得较大的进步。而我国对于无人驾驶智能车的研究则起步相对较晚,直到1992年我国才研制出第一辆无人驾驶智能车。当前由于汽车和互联网技术的发展,正如每个人可以感受到的,人工智能技术和智能化的普及正使得我们的生活越来越便捷,无人驾驶智能车也不例外。如何通过互联网将无人驾驶技术应用到车辆中实现解放驾驶员,则是未来汽车领域发展的一大方向。
1.1国外研究现状分析
无人驾驶汽车技术早在20世纪50年代左右就被德、英、美、法等国家涉猎研究,并取得较大的技术进步。国外目前的研究已经初步能实现无人驾驶技术辅助驾驶。
谷歌,作为互联网公司,在无人驾驶智能车方面也有一系列的研究。其中谷歌公司研发的第一款无人驾驶智能车“萤火虫”利用各种传感器将道路信息、汽车行驶信息传给数据采集系统,由行车电脑进行数据处理,作为控制决策系统,行车电脑将指令传输给执行系统,即行驶系统,“萤火虫”的形式系统采用线控系统,这样就能实现无人驾驶智能车的转向操作了。
英国布里斯托大学,联合英国先进交通系统公司于2010年研发了UL Tra无人驾驶汽车,UL Tra能实现在设定的道路上行驶,能实现固定的转向操作以及适时的变速和刹车操作。显而易见的是这样的无人驾驶水平仍处于研发的初级阶段,只能在简单道路上行驶。
同年,甲骨文公司,联合大众、斯坦福大学实验室则是研发出智能车Shelley。Shelley利用高精度的GPS准确定位车辆的位置,通过无人驾驶转向的纵向控制系统,调整车辆行驶的速度和牵引力,从而利用道路规划,使得汽车达到最优行驶性能区间。
同样采取了高精度特殊GPS系统的塞卡博无人驾驶汽车,则是由法国INRIA公司研制。塞卡博采用的是精度高达1厘米的“实时运动GPS”,结合激光传感器、双镜头照相机等获取道路信息,可以按照规划路径行车并避免撞车。
特斯拉,作为电车汽车制造商,则是在2017年就实现了城市道路的无人行驶实验。特斯拉汽车用8台CCD图像传感器取代了GPS和超声波等传感器的使用,提高了智能车的视野采集范围也提升了无人驾驶智能车的安全性。
德国Ibeo公司出售的雷达主要是Scala和LUX两款。2017年发布的带有L3自动驾驶功能的奥迪A8,则是采用了ScaLa车载激光雷达,这种车载激光雷达可以获取车道标线、目标物识别以及各种交通标识等,基本实现了可以在较为复杂的城市道路上进行无人驾驶。
1.2国内研究现状分析
我国对于无人驾驶智能车的研究经历了冗长且曲折的过程。我国无人驾驶技术从上世纪80年代就开始了相应研究,之后全国各高校和科研机构都陆续展开相关研究,但大多数机构仍处于初步研发阶段。但值得庆幸的是,我国已意识到“互联网 ”的重要性,将无人驾驶智能车作为未来汽车领域的重要发展方向,投入了大量的人力物力给相关研究提供支持。
从时间轴来看,首先是2001年研制成功的无人车,实现了无人驾驶的基本要求,然后是2003年研制成功的高速无人驾驶轿车红旗CA7460,实现了无人驾驶技术的速度上的突破,接着是2011年研制成功的无人驾驶智能车红旗HQ3,实现了无人驾驶智能车在较为复杂的道路环境下的高速行驶。这标志着我国无人驾驶智能车的技术研究实现了新的突破,跻身世界前列。
到了2015年,百度公司设计的无人驾驶智能车在采用线控转向系统的基础上,结合Road Hacker平台实现了全球首次在真实道路上端对端模式的自动驾驶。简单来说,百度设计的这款无人车实际上是以设定的路径为基础,结合驾驶人的驾驶行为,不断模仿学习并修正算法,以贴近驾驶人的驾驶习惯,使得无人车的行驶更加平稳,且面对两难选择时更倾向于人为驾驶的选择。例如,在无人驾驶智能车遇到碰撞安全的两难抉择上,可能更倾向于保护行人和驾驶员而不是保证车辆的完整性。这里涉及法律、伦理等问题,不作过多讨论。
据相关专家预估,到2020年,我国将解决无人驾驶智能车最为关键的问题——汽车追尾,即运用CDD传感器检测汽车车轮定位参数,以获取道路信息,判断与前车的车距,利用执行机构进行自主油刹。到2030年,我国将大幅运用半自动驾驶技术,简单来说就是无人驾驶技术将拆解为两大部分——转向(横向)控制系统和纵向控制系统,而届时具有半自动驾驶技术的智能车将能配备其中一部分的智能控制,驾驶员只需要完成另一部分的操作即可。
1.3研究目的及意义
尽管当前无人驾驶技术已经有了较大的突破,但是我们不得不承认的是我们的研究到目前为止只能实现在较短时间内的稳定驾驶,也就是辅助驾驶,而真正的无人驾驶的实现还有很长的路要走。当今的无人驾驶系统虽能胜任简单的路况,但要实现投产则必须要经受复杂城市道路的考验,仍然有很多难点需要得到解决。
其中一个关键点则是转向系统,转向系统需要完成的任务十分繁重。首先是如何准确获取汽车行驶的实时道路信息,然后就是将接收到的道路信息如何通过车载电脑进行准确运算并依据怎样的原则进行分析,接下来就是如何将车载电脑做出的决策在机械结构上实现,从而实现最后的转向操作。显而易见的是无人驾驶技术的转向部分需要依据实施道路信息和规划路径精确完成指定的角度及角速度的转向要求。换言之,转向系统是无人驾驶智能汽车一个非常重要的执行机构,同时也是保证汽车主动安全性能的一个关键。
更加具体的来说,在设计汽车转向控制性能时,我们需要考虑的问题十分复杂,不仅包括无人驾驶汽车如何实现在设定的路径上行驶,更要保证在复杂路况上能依据实时道路信息进行数据、决策的更新以保证汽车行驶安全。这里的安全不仅指代汽车本身的碰撞安全更强调无人驾驶汽车对行人安全的威胁程度。总言之,衡量无人驾驶智能车自主转向系统的标准是要保证无人驾驶智能车具有自主转向的正确性、稳定性、实时性和及时性。
第二章 转向系统技术方案
2.1转向系统简述
汽车在行驶的过程中,有时需要改变行驶方向,我们称为转向。现在普遍意义上的汽车是通过转向轮相对于汽车纵向轴线进行一度角度的偏转来实现的。汽车转向系统是用以改变或保持汽车行驶方向的专用系统。其作用是使汽车在行驶过程中能按驾驶员的操纵要求适时适当的改变其行驶方向,并且在受到路面传来的偶然冲击以及汽车可能意外的偏离行驶方向时,转向系统能与行驶系统配合共同保持汽车继续稳定行驶。因此,转向系统的性能直接影响着操纵稳定性和汽车行驶的安全性。
2.2无人驾驶转向系统设计方法
目前较为广泛的无人驾驶技术的研究方法,多以针对传统机械系统或机构进行改造为主要手段,这不仅可以保证当无人驾驶手段失灵时,保留原有的机械系统或机构,使得驾驶员拥有操控车辆的权力,还可以节省研究时间、资金成本等。因此我们采取同样的方法,选择合适的传统动力转向机械系统,进行适当的改进,设计出一款自主转向系统,使其实现无人驾驶的转向要求。
自主转向系统主要分为三大部分:自主转向执行装置、自主转向控制系统(横向控制系统)和纵向控制系统。其中,自主转向执行装置是在传统机械转向系统的基础上进行改造,通过伺服电机等提供扭矩带动转向机构运作,这是实现自主转向的基础。其中,自主转向控制系统的核心是横向控制器,主要负责将传感器收到的数据进行分析并转化为控制指令,这是自主转向的重要部分。其中,纵向控制系统主要是保证无人驾驶智能车的稳定性,以防止速度过高易发生侧滑、侧翻,同时提供防撞车、防追尾功能,这是自主转向不可或缺的部分。
在本设计中,自主转向执行装置是本次设计的关键和重点。该部分主要是机械部分的设计,因此主要采用的技术方案是对传统微型车(电动车)的转向机构的改造设计。考虑到线控系统的设计主要设计到大量的电路控制设计,较为困难,因此选择在传统机械动力转向机构设计上进行一定的改造。从动力转向系统着手,将电动助力转向机构进行改造、使其完全承载所有转向所需扭矩。电动机直接助力式转向机构的方案。
另外,目前大多数自主转向系统的控制器大多数都是选择的伺服电机。这种伺服电机实际上就是对原有的机械转向系统的电动助力转向的一种升级,电机的助力效果改为完全施力者,但是这样也同时可能存在电机尺寸和参数过大占用过多空间的现象。
2.3转向系统相关参数确定
经过前期调研,本设计整车参数的的目标车型即为宝骏E200,相关参数如表2.1所示:
表2.1 宝骏E200整车相关参数
尺寸参数 | 长/宽/高 | 2479mm/1526mm/1616mm |
轴距 | 1600mm | |
前轮轮距 | 1310mm | |
质量参数 | 整备质量 | 842kg |
满载质量 | 1022kg | |
其他可能影响转向设计参数 | 驱动方式 | 前置前驱 |
助力类型 | 电动助力 | |
前悬架类型 | 麦弗逊式独立悬架 |
为了保证校核具有良好的通过性,在最大转角时的最小转弯半径为轴距的2-2.5倍。根据整车数据,设计转向半径为,主销间距定位,前轮轮距。
由此,可依据阿克曼转角关系得转向轮外轮最大转角为
转向轮内轮最大转角为
即转向轮外轮最大转角为,内轮最大转角为。
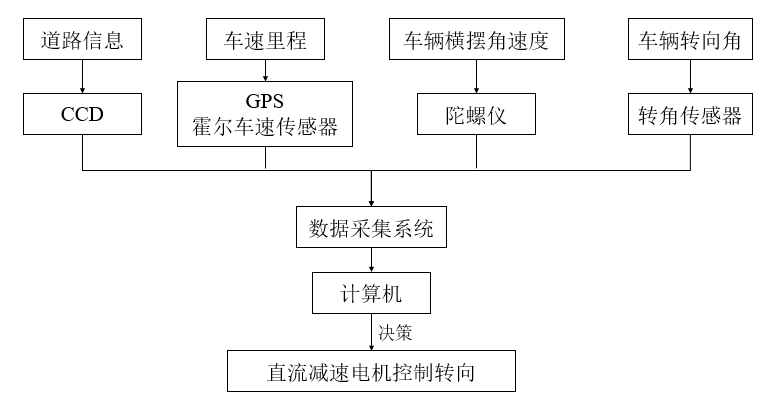
2.4转向系统技术方案选定
自主转向控制系统分为传感系统、数据采集系统、控制决策系统和执行系统。具体流程如图2.1所示。