全轮转向长编组汽车列车横向动力学建模仿真研究毕业论文
2020-02-17 10:57:34
摘 要
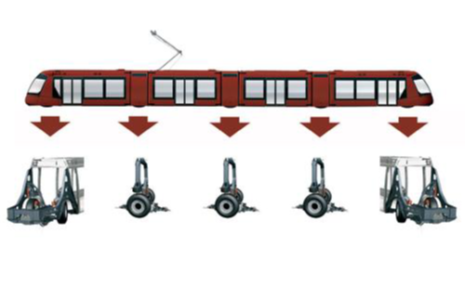
为提高城市公共交通系统客流运输效率,本文提出了一种长编组汽车列车架构并进行运动特性研究。首先,结合国内外研究现状,参考劳尔电车结构并改进,提出具有大容量、自导向的长编组多铰接汽车列车架构;然后,为尽可能地降低地板高度,研究了其车间模块及铰接形式,确定了外形参数和动力驱动方案,使长编组列车能在复杂的城市空间灵活运行;接着,提出了基于轮毂电机的全轮差动转向控制自导向实现方法,以降低汽车列车驾驶操作难度和实现车辆的自动驾驶功能;最后,在SIMPACK环境中建立了整车模型,使用Pacejka Similarity模型建立了轮胎力元,进行了稳态转向和PID控制转向仿真。仿真结果表明:提出的全轮差动转向汽车列车架构及控制方法,可控制车辆按照既定路径稳定行驶,其横摆转向特性在合理范围内。提出的具有大容量和自动驾驶功能的全轮转向虚拟轨道汽车列车可用于空间有限的城市道路,为城市公共交通车辆的开发提供参考。
质心侧偏角、横摆角速度
具有随动转向功能的长编组汽车列车存在临界车速、当车速超过此值时,车辆将会处于失稳状态
关键词:长编组;汽车列车;差动转向;低地板
Abstract
In order to improve the efficiency of passenger flow transportation in urban public transportation system, this paper proposes a long-formed car train architecture and studies the motion characteristics. Firstly, combined with the research status at home and abroad, with reference to the structure and improvement of Raul tram, a long-group multi-hinged car train structure with large capacity and self-direction is proposed. Then, in order to reduce the floor height as much as possible, the workshop module and articulated form are studied. The shape parameters and power drive scheme are determined, so that the long group train can run flexibly in complex urban space. Then, the self-steering method of all-wheel differential steering control based on hub motor is proposed to reduce the difficulty of driving and driving the train. The vehicle's automatic driving function is realized. Finally, the vehicle model is established in the SIMPACK environment. The tire force element is established using the Pacejka Similarity model, and the steady-state steering and PID control steering simulation are performed. The simulation results show that the proposed all-wheel differential steering vehicle train structure and control method can control the vehicle to run stably according to the established path, and its yaw steering characteristics are within a reasonable range. The proposed all-wheel steering virtual track car train with large capacity and automatic driving function can be used for urban roads with limited space, and provides reference for the development of urban public transportation vehicles.
Key Words:Long combination vehicle;Differential steering;Low floor
目 录
摘 要 3
第1章 绪论 7
1.1 研究背景 7
1.2 中运量多铰接车辆研究现状 7
1.3 汽车横向动力学概述 9
1.4 主要研究内容及意义 10
第2章 长编组多铰接列车架构研究 11
2.1 长编组车辆架构方案 11
2.3 车辆模块化研究 12
2.4 长编组车辆铰接研究 14
2.5 多铰接车辆动力配置方案研究 16
2.5.1 现有可编组车辆动力布置方案 16
2.5.2 动力布置方案 16
2.6 驱动方案研究 17
2.7 转向方案研究 17
2.7.1 现有技术 17
2.7.3 转向控制技术方案 19
2.8 本章小结 20
第3章 车辆性能计算与分析 21
3.1 列车曲线通过性能计算 21
3.2 铰接功能分析 25
3.2.1 侧倾运动分析 25
3.2.2 横摆运动分析 26
3.2.3 俯仰运动分析 26
3.3 功率估算与校核 26
3.3.1 功率估算 26
3.3.2 功率校核 28
3.4 轮毂电机参数设计 29
3.5 本章小结 30
第4章 多自由度多铰接车辆动力学模型 31
4.1 平顺性分析简化模型 31
4.2 操纵稳定性分析简化模型 32
4.3 轮胎动力学模型 35
4.4 长编组汽车列车的行驶动力学分析 35
4.5 全轮独立转向系统模型 38
4.6 循迹控制模型 40
第5章 多铰接车辆SIMPACK建模 44
5.1 多体动力学商用软件介绍 44
5.2 车厢子模块建模 44
5.3 车间模块子模块建模 46
5.3.1 整体搭建 46
5.3.2 铰接定义 47
5.3.3 轮胎力元建模 47
5.4 整车模块建模 49
5.4.1 架构搭建 49
5.4.2 铰接与约束定义 49
5.4.3 自由度分析 50
5.5 本章小结 51
第6章 系统横向动力学仿真分析 52
6.1 稳态转向仿真 52
6.2 PID控制转向仿真 58
第7章 全文总结与展望 66
参考文献 67
致 谢 70
附 录 71
单轴轮速控制程序 71
SIMPACK处理文件 81
绪论
1.1 研究背景
随着城市机动车保有量持续增长,城区空气污染加重,城市交通效率低下,寻找一种具有高运输效率的新型公共交通运输方式十分重要。与城市轨道交通系统相比,BRT道路建设成本低,周期短,可应用于复杂的城市交通网。BRT的载客能力单向可达到每小时16000至26000人次,这已接近轨道交通的载客能力。
为提高现有城市交通的通行效率,国内外汽车研究人员一般通过增加BRT车辆的车厢长度、车厢数量和车厢层数来提高运输量。增加车厢长度虽在一定程度上可以提高运量,但是由于转向灵活性和转向半径的限制,提升空间有限;增加车厢层数则会导致车辆重心位置上移,车辆行驶横向稳定性不足,操纵稳定性下降;增加车厢数量并且采用多铰接汽车列车的新架构,可以有效提高载客量以及降低能源消耗和道路磨损[1]。
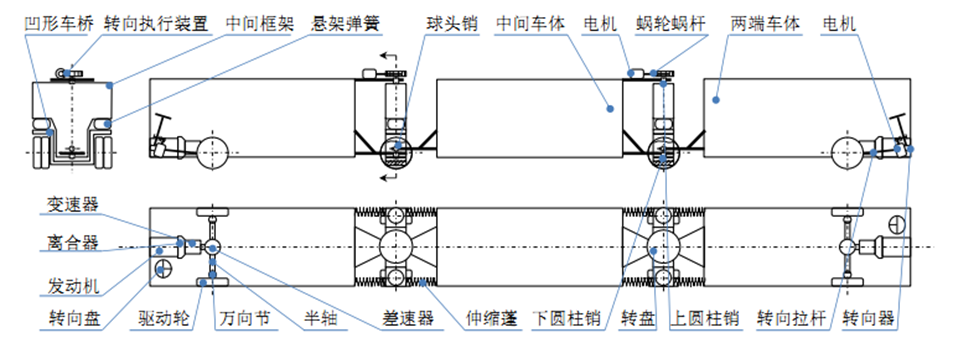
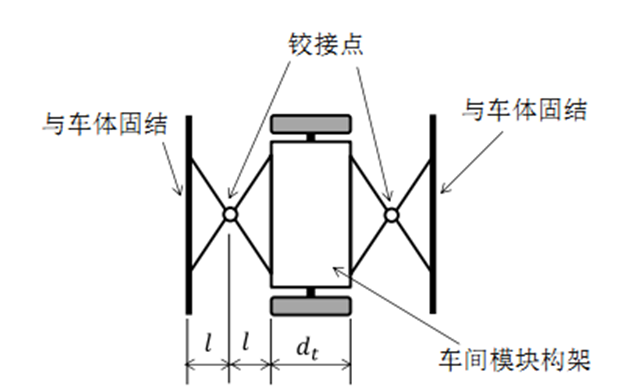
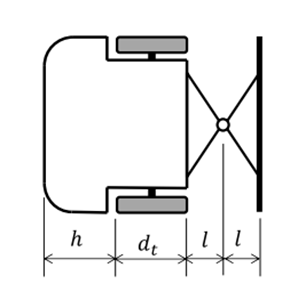
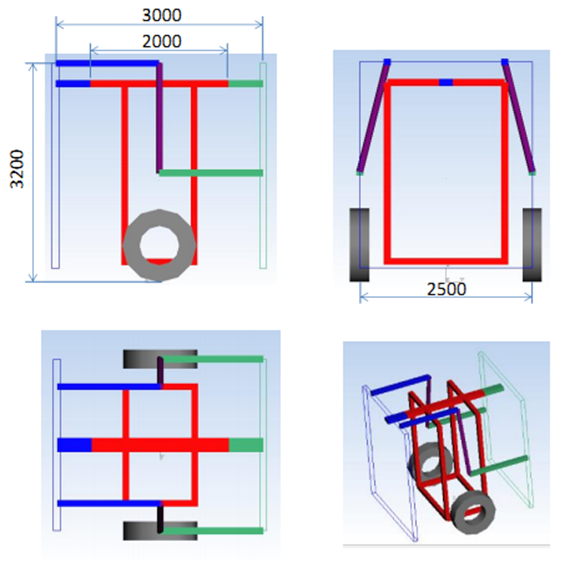
发展低地板城市客车,不仅有利于老弱病残上下车,而且有助于降低长编组车辆的重心,从而提高车辆的操纵稳定性,亦有利于缩短车辆在每个站台的停站时间,从而提高整个交通系统的运营效率。因此,低地板、低入口城市客车已成为欧洲国家发展车型的主流。为了真正实现车厢地板的高度统一并且满足低地板化的要求,本文将支承车厢载荷的车桥和悬架、车轮等行驶系统零部件布置在前后两节车厢之间,即车间联接部件不但要满足车辆转弯行驶时前后车厢的运动轨迹实现要求和车厢的俯仰、侧倾、横摆等相对运动需求,同时还应具备支承车厢载荷的能力。如果车间模块承担了驱动车辆的任务,那么它同时还应具备产生车轮驱动力的能力[2]。
1.2 中运量多铰接车辆研究现状
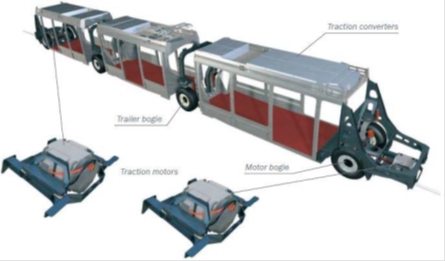
艾因霍芬市起初规划建设轻轨交通系统,经过研究后,决定建造轻轨交通系统,从机场到火车站及中央新生活区,总长15公里,单车道宽3.3米,并且采用全新的斐利亚巴士。荷兰斐利亚巴士主要包含18米型和24米型两种车型,它采用先进的混合动力系统,有助于城市环保。斐利亚巴士的动力源主要来自架空馈线,电力不仅可以即采即用,也可以储存后再使用。除此以外,它的准时性和安全性可以与轻轨媲美。车辆携带的控制器不仅可以监控车况和数据以调整驾驶状态,也可以沿路面埋设的磁标的轨迹自动行驶。在任何天气,其行驶速度都能达到80km/h[5]。

图 1.1荷兰VDL-Phileas APTS双铰客车
德国Fraunhofer长约31米,是世界上最长的双铰接巴士。该车共有5个车轴,包括4个转向轴,可搭载256名乘客,并且可通过电脑控制保持直线行驶。它的主要特点是,混合动力和电力交替使用。当电力耗尽时,混合动力开始工作,在为车轮提供驱动力的同时为电池充电。其外形如下所示[6]

图 1.2 Fraunhofer双铰接车

图 1.3 Fraunhofer车辆结构参数示意图
2007年郑州宇通客车推出25米场双铰接式客车,载客量达230人以上。它采用CAN电器总线系统,可监测车轮行驶状态。它通过采用独立悬架,降低了车辆的地板高度,并且拥有940mm的过道宽。由于该车型第1轴为转向轴,其他轴为非转向轴,因此在车辆转向行驶时,随动车轴运动轨迹内移,对道路宽度要求较大。

图 1.4郑州宇通ZK6251G客车
罗仁坚等人将现有城市客流运输方式及其指标进行了对比,得出了快速公交将成为城市交通运输的主要方式的结论。但是,现有 BRT 车辆存在两大问题:大多以内燃机为动力源,环保问题没有根本解决;车辆对曲线道路的适应性受到了转向功能和铰接方式的限制,编组数量受到限制,多车编组优点得不到充分利用。而无轨电车由于直接从市电电网取电,其能量转换效率可高达 95%,而且可以持续从电网取电行驶,因此不存在蓄电池容量重量比、车辆续驶里程等问题,而这些问题也正是目前困扰普通的电驱动汽车客车的关键技术问题和发展的制约因素[3]。
1.3 汽车横向动力学概述
车辆动力学主要包括行驶动力学(包括纵向和垂向)、操纵动力学(横向)、轮胎动力学以及多体系统动力学等。
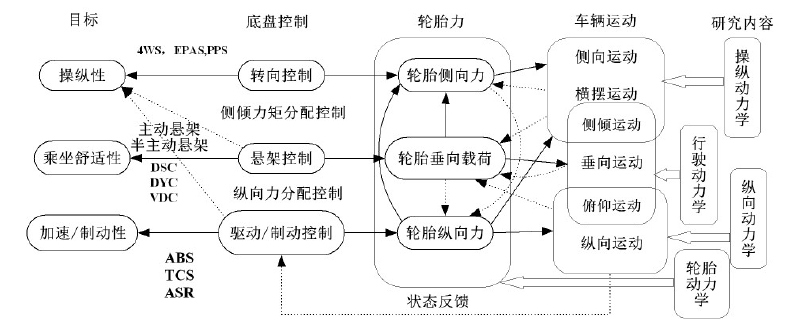
图 1.5 车辆动力学研究内容
操纵动力学主要通过研究车辆的操纵性能。不仅考虑轮胎的侧向力,也要考虑转向中引起的车辆侧滑、横摆和侧倾运动等。汽车动力学主要分为行驶动力学和操纵动力学(横向),而行驶动力学可分为纵向动力学和垂向动力学。操纵稳定性的好坏直接影响了汽车的动力性和安全性,操纵稳定性主要分为操纵性和稳定性两方面。操纵性指汽车队驾驶员主观操作的反应能力,即能否及时而准确地改变行驶方向和改变速度。稳定性指车辆收到外部干扰后回复原来状态的能力。两者通常是矛盾的,因此,科研人员需要寻找操纵性和稳定性的折中处。
20世纪30年代到50年代,车辆操纵动力学发展进入了崭新的时期,人们发现了轮胎的侧偏现象,并逐渐认识到轮胎力学在操纵稳定性中的重要性。一批学者开始研究轮胎特性,定义并建立了侧偏角、不足转向、过度转向、平稳行驶等概念,从而对轮胎力学有了进一步认识。20世纪80年代初,各种多体动力学分析软件和有限元分析软件应运而生。正如本文中所使用的SIMPACK,便是广泛应用于航天、汽车领域的分析软件。分析软件的使用,不仅缩短了产品的设计和生产周期,而且减少了设计费用。
轮胎连接着车辆和地面,受到不同方向的力和力矩,起着承载、转向、驱动、制动灯作用,同时影响着车辆的动力性、制动性、操纵稳定性、安全性、乘坐舒适性等。轮胎力学主要基于轮胎在行驶过程中的变形,对其侧偏特性,振动特性进行分析。最著名的是1991年Pacejka.H.B通过大量的轮胎试验建立的Magic Formula轮胎模型,俗称“魔术公式”。它通过一个魔术公式能够完全表达不同驱动情况时的轮胎特性
1.4 主要研究内容及意义
在了解国内外城市轨道列车、BRT客车等相关产品及研究调研的基础上,分析既有城市BRT客车实际运行状况,进一步了解相关车型的技术特点,结合中国城市公众出行需求和交通状况,提出全轮转向长编组汽车列车无轨自导向公交运输系统架构。
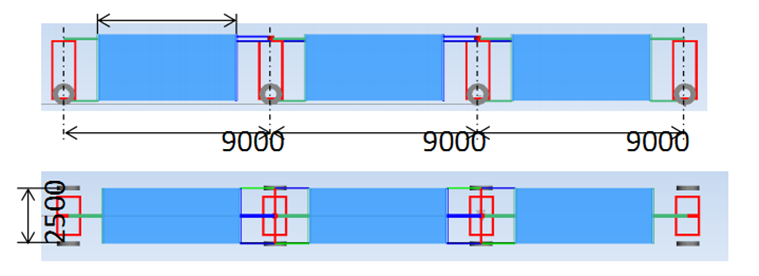
结合现有BRT车辆的应用情况及优缺点,如荷兰VDL-Phileas APTS双铰接车、德国Fraunhofer双铰接车、宇通双铰接客车、青年双铰接客车,总结多种车辆总体架构设计方案,并对其优缺点进行总结阐述,确定适用于本课题的架构设计方案。然后结合车辆相关标准,简要设计车间模块结构及外形,计算最小转弯半径通道圆[4]。
通过查阅相关技术标准和资料,确定长编组汽车列车的动力配置、铰接、导向等方案后,设计车辆有关尺寸参数以及特殊部件结构,建立整车动力学数学模型,借助SIMPACK软件建立整车模型,定义轮胎力元参数,分析轮胎动力学模型,基于车辆操纵稳定性,结合轮胎侧偏及转向特性,进行汽车列车横向动力学分析,提出汽车列车架构优化方案,使其具有一定的科学性、经济性和技术可行性。
研究意义:针对既有地面公共交通,特别是现代有轨电车和公共汽运车辆的技术瓶颈,以高适应为目标,提出了一种全轮差动转向长编组汽车列车架构。为使动力传动系统结构简化,并尽量扩大车内低地板乘客空间,制定了分布式轮毂电机驱动的技术方案,并通过电子控制实现全轮差动转向,即各车桥都可以通过其车轮的驱动电机差动控制实现转向功能。车间模块集承载、驱动和转向功能为一体,并且车辆可通过主动式转向控制,有效解决长编组车辆行驶轨迹内移问题。在此背景基础上,进一步将轨道交通的理念与BRT进行融合,从机械系统及轮胎建模出发,开展长编组虚拟轨道汽车列车横向动态特性研究及优化,研究基于胎/地耦合的全轮转向汽车列车多体动力学理论,分析车辆在稳态转向等工况下侧偏特性,并提出架构改善建议提高车辆稳定性及防止侧翻。
研究目的:
(1)分析既有低地板有轨电车和快速公交BRT的模式特征,以高适应性为目标,进行全轮转向长编组汽车列车架构研究。
(2) 开展汽车列车长编组多铰接系统横向动力学研究,分析侧偏及转向特性,并建立相关数学模型
(3)利用三维建模软件Simpack,建立虚拟轨道长编组汽车列车模型,参考相关车辆设计标准,对车辆开环测试工况进行仿真。
(4)参考相关车辆性能评价标准,对仿真结果进行分析,对车辆动态响应及转向特性进行评估。
长编组多铰接列车架构研究
现有BRT车辆包括无铰接、单铰接、双铰接三种类型,为了研究长编组汽车列车的横向动力学特性,本章主要分析六铰三车厢形式。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: