基于电动汽车的一种经济有效的电制动能量再生技术外文翻译资料
2021-12-16 23:15:05
英语原文共 10 页
基于电动汽车的一种经济有效的电制动能量再生技术
杨明基,周宏林,马炳彦,施国凯,IEEE会员
摘要:本文基于电动汽车,提出了一种简单而有效的无刷直流电动机电制动能量再生技术。在制动期间,将逆变器的开关顺序改为控制反扭矩,回收制动能量,储存至电池。与现有的方法相比,本文提出的方案可以在不使用附加转换器,超级电容,或复杂的绕组转换技术的同时,实现电制动和能量再生的双重目标。能量再生可使得制动过程中动能转化为电能,从而增加电动汽车的行驶里程。除了刹车期间,释放节气门的持续时间也包括在能量再生机制内,这使电动汽车与装有发动机制动器的发动机车辆相似。因此,电力刹车可以提高驾驶者的舒适性,提高电动汽车的安全性。最后,通过实例验证了该方法的可行性。实验结果表明电动汽车的行驶里程可提高16.2%左右
关键词: 无刷直流电机(BLDCM),电动制动器,电动汽车(EV),能量再生。
1绪论
最近,因为环境污染和全球能源危机正在上升,大多数工业化程度高的国家一直在努力减少他们对于石油资源的依赖。 因此,相比较传统汽车,电动汽车(EV)更有前景。 大多数电动汽车,包括电动车,电动滑板车,电动自行车,电动轮椅等由存储在电动轮椅中的电池进行电力驱动。 然而,电动车仍然存在着一些主要问题,例如行驶里程短。 因此,如何有效使用电池的能量是发展电动汽车的一个重要问题[1]-[19]。
无刷直流电机(BLDCM)相比于有刷直流电机和感应电机具有许多优点,如结构简单,效率高,动态响应高,更高的速度区间,大启动扭矩,无噪音操作等。因此,BLDCM已应用于许多领域。特别是集线器类型的BLDCM广泛用于电动汽车,因为它有许多优点,例如:减小硬件尺寸和重量,简化的传动机构,无减速齿轮、高效的驱动系统。因此,本文在轻型电动汽车(低排放汽车)中应用两个集线器型BLDCM。
传统上,电动汽车使用机械制动来增加轮子的摩擦力从而达到减速目的。 但是,从节能的角度来看,电动汽车的动能很大部分会转换为热能,因此机械制动会耗散很多能量。 鉴于此,本文讨论了如何做到将动能转化为电能,储存到电池中,达到电制动和实现能量再生的双重目的。
到目前为止,许多文章讨论了电动汽车的制动能量再生技术[5]–[19]。所谓的制动能量再生主要是利用制动过程中电机的反电动势(EMF)。反电动势被认为是电池充电的电压源。然而,即使电动汽车以最高速度行驶,最大反电动势通常也低于蓄电池电压。因此,如果要将反电动势重新充电到蓄电池,必须提高反电动势电压。因此,许多文章提出了一种实现制动能量再生的DC/DC变换器[6]–[10]。但是,这些方法需要一个额外的DC/DC转换器来达到目的。除了会增加成本之外,变频器的效率问题也会导致额外能量耗散。
此外,一些文章提出了基于超级电容器并联或串联实现能量再生的方法,希望将制动能量可以暂时储存在超级电容器中[11] - 16]。 虽然这种方法不需要额外的DC / DC转换器,而是需要额外的电源开关来实现能量再生。 但是,它需要传感器来检测超级电容器是否处于完全充电状态; 因此,需要使用额外的放电电路来避免在下一次制动之前过度充电。 因此,它使得切换逻辑非常复杂,不易实现。 此外,超级电容器也非常昂贵。
此外,电子换档技术也应用于电动汽车的制动能量再生[17] - [19]。 实施电子换档时,电机必须设计为多个绕组连接型,为电动汽车提供各种输出扭矩。 由于电机扭矩与磁通量成正比,具有较高绕组的电动机可以引起更高的扭矩。 因此,如果在短时间内需要高输出扭矩,例如电动汽车启动过程,电动机绕组必须通过串联连接来增加绕组电感。 当电动汽车行驶得更高速度时,因为串联绕组导致更大的反电动势,电机无法提高其转速。这时,绕组必须改为并联型,使反电动势减小,转速可以持续上升。另一方面,由于串联绕组具有较高的反电动势,在能量再生模式期间绕组类型改变为串联连接。 但是,即使是绕组类型改为串联,反电动势电压仍低于蓄电池电压。 因此,制动能量也必须存储在超级电容器中[18],[19]。
除了上述超级电容器的缺点之外,电子换档具有以下问题。首先是电机绕组必须是专门设计的;其次是绕线完成复杂的连接转换取决于许多大功率开关(或锁存继电器);很难保持换档的平稳性瞬态,因为换档点与每个齿轮的扭矩曲线都相关。 另外,考虑到每个齿轮的电机效率曲线,换档条件使问题更复杂。 因此,如果将电子变速器应用于能量再生区域,受控逻辑会非常复杂。
鉴于上述方法,本文以一般BLDCM上为基础,不使用升压转换器,超级电容器和多个绕组,致力于开发一个简单但有效的方法,将制动能量转换为电能然后存储在电池中。 这种方法具有电动制动和能量再生的特性,可以增加驾驶里程,提高电动汽车的安全性和成本效益。在实际应用中,电池可能因为高速状态下持续的恢复电流受到损害。因此,本论文提出了一种控制策略,不仅限制电流保护电池,还能提供顺畅可靠的制动。 除制动期外,释放节气门也包括在能量再生机制中,这样电动汽车与发动机制动效果相似。 它可以提高驾驶者的舒适度以及电动汽车的安全性。
最后,通过实验结果验证了该方法的可行性。此外,还有原型电动汽车开发来用于验证此方法可有效地增加行驶里程。 本文的结构如下。第一节介绍了研究目的,并讨论了相关的现状技术。第二节简要分析了电机的正常情况模式和所提出的能量再生方法的工作原理。 第三节提出了基于一种电动汽车的系统方案。第四节展示了模拟和实验结果。最后在第五节提出结论。
2制动能量再生的分析和工作原理
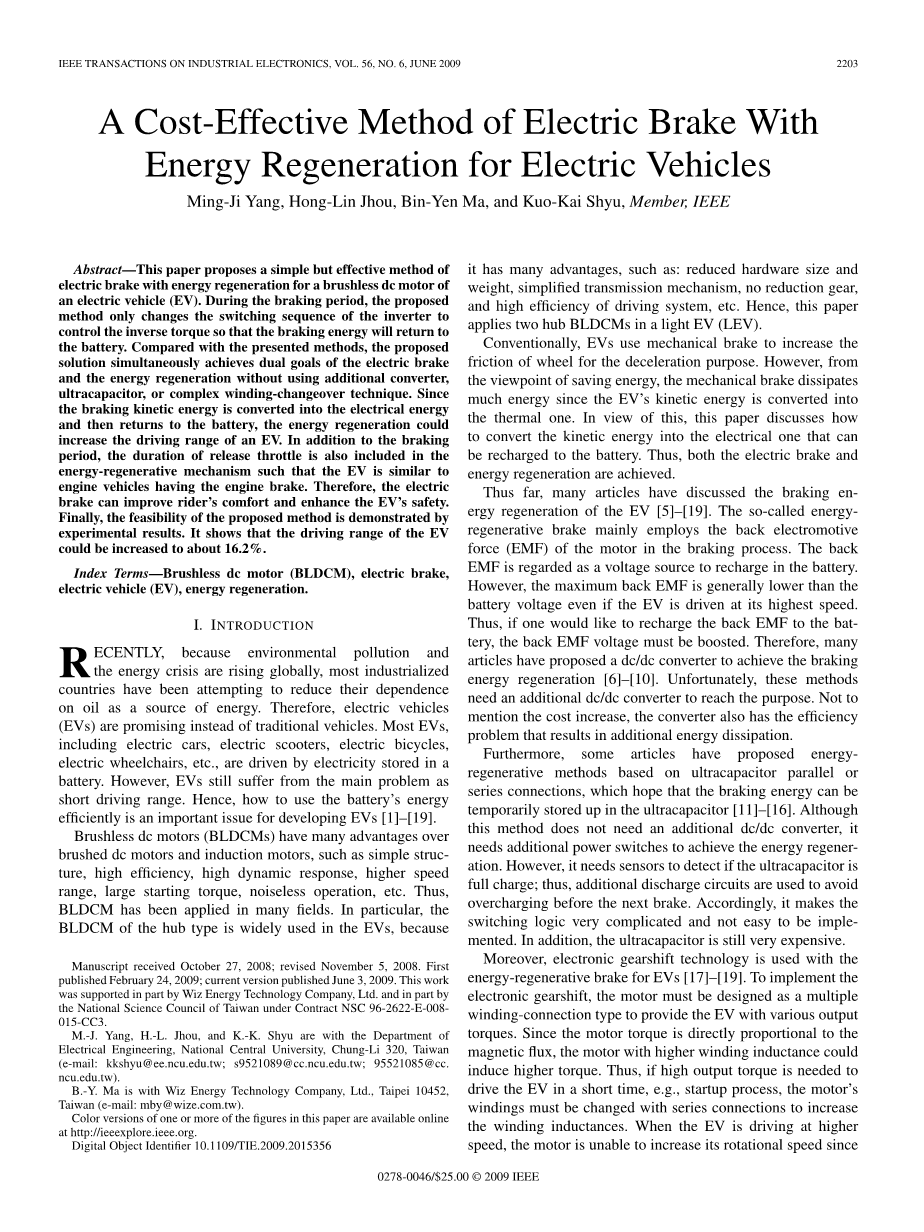
图1.等效电路和信号序列。(a)无刷直流电机的电压源逆变器和等效电路。(b)霍尔传感器信号、反电动势和正常与能量再生模式的开关信号序列。
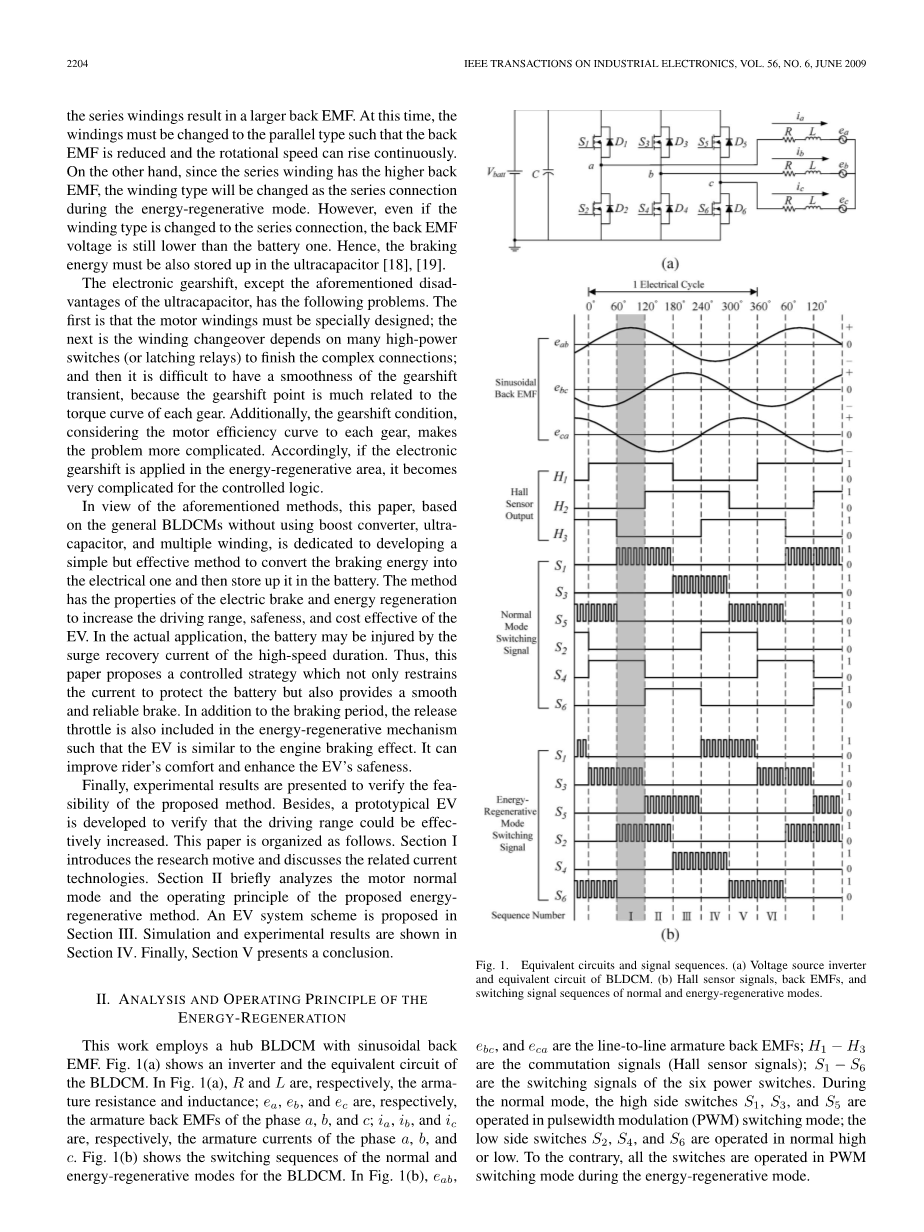
图2.正常模式下的相关电流状态。(a)等效电路。(b)输入和相电流波形,S1和S4的开关信号。
图3.能量再生模式下的相关电流状态。(a)等效电路。(b)输入和相电流波形,S2和S3的开关信号。
这项工作采用带有正弦规律反电动势的集线器BLDCM。图1(a)表示逆变器和BLDCM的等效电路。 在图1(a)中,R和L分别是耐久性和电感; ea,eb和ec分别是a,b和c相的电枢反电动势; ia,ib和ic分别是a,b和a相的电枢电流。图1(b)显示了BLDCM的正常切换顺序和能量再生模式。 在图1(b)中,eab,ebc和eca是线对线电枢反动势; H1-H3是换向信号(霍尔传感器信号); S1-S6是六个电源开关的开关信号。正常模式中,高侧开关S1,S3和S5在脉宽调制(PWM)切换模式下工作;低侧开关S2,S4和S6在正常高电平或低电平下工作。 在能量再生模式下,与之相反,所有开关在脉宽调制(PWM)切换模式下工作。
2.1正常模式
从图1(b)可以看出,一个完整的换相序列由六个间隔状态(状态I-VI)组成。为了便于分析,将图1(a)简化为图2(a),图2(a)给出了六个间隔状态间隔中的一个及其等效电路。在状态I时,表示在传导模式开关S1和开关S4同时打开。电感电流iab将随线圈的通电回路电流ion增加。此时,由于绕组磁场随iab的增大而增大,反向感应电压eab根据楞次定律抵抗磁场的变化。这就是所谓的电机的电枢反电动势。在另一种模式(自由模式)中,开关S1关闭,S4仍处于开启状态,电感电流将流入整流二极管D2和开关S4,形成放电电流路径ioff。因此,S1、S4、输入电流iin、相电流iab的对应序列如图2(b)所示。图1(b)中状态II-VI的切换模式与状态I相似,因此省略了状态II-VI的分析[20]。
2.2能量再生模式
如果电动汽车的微控制器单元(MCU)接收到制动信号,则应将电机运行由正常模式变为能量再生模式。此时,假设开关序列最初处于状态I,为如图1(b)所示。因此,分析了能量再生模式在状态I持续时间内的工作原理。
图3(a)为能量再生模式的等效电路。当电机进入能量再生模式时,反电动势eab成为电压源。此时改变开关顺序,打开开关S2和S3。与正常模式不同,在同步PWM中开关S2和S3都工作。在S2和S3的通电期间,由于绕组通电,电压vL等于Vbatt eab,电流iin等于- iab,或ion。相反,在S2和S3断开期间,流经整流二极管D1和D4的电流iin等于iab,使电流ioff返回电池。因此,S2、S3、输入电流iin、相电流iab的对应序列如图3(b)所示。
在不同电机转速和制动力矩下,绕组电流的分析将分为不连续传导模式(DCM)和连续传导模式(CCM)[21]。图3(a)等效电路的分析基于以下假设。
1)电路处于稳态运行。
2)切换周期T,开关闭合时间为Delta;ton,断开时间为Delta;toff。
3)所有开关、导线、电机绕组均为理想状态,无功耗。
图4.电感、电压和电流的波形,S2和S3的开关信号(a)不连续传导模式。(b)连续传导模式。
不连续传导模式:如果电机以较低的速度运行并且制动力矩较小,电机将在不连续传导模式下工作。期间S2和S3接通,电机绕组反向通电,电感电压vL等于vbatt eab;在S2和S3关闭期间,电感电压vL等于minus;vbat。S2、S3、VL和电感电流IL的相关序列如图4(a)所示。电感器上的电压是:
vL = L. (1)
即:
Delta;iL = Delta;t (2)
电感电流IL在传导和截止状态分别为,
Delta;iL(ON) = (3)
Delta;iL(OFF) = (4)
稳态运行要求开关周期结束时的电感电流与开始时相同。这意味着电感电流在一个周期内的净变化为零。这需要:
Delta;iL(ON) Delta;iL(OFF) =0 (5)
将(3)(4)代入(5),得到
(6)
即:
(7)
从上面的方程可以看出,在S2和S3接通时,电池能量传递到电机;在S2和S3关闭期间,制动能量返回到电池。能量W等于0.5times;Vbatttimes;Delta;i times;Delta;t。因此,对于电池,输入能量与输出能量比例为:
(8)
式中,Wr为再生能量,Wt为输出能量。接下来,我们使用VEMF而不是式(6)中的eab来表示电机反电动势,由此可以得到不连续传导模式下的电池I/O能量,如下:
(9)
连续传导模式:如果电机以更高的速度运行并且制动力矩
资料编号:[4789]



