驻车下车辆主动式预警系统模拟设计毕业论文
2020-02-13 17:55:40
摘 要
在汽车行业已达到饱和的最近几年,汽车电子行业却呈冉冉上升之势,将电工电子设备安装在汽车内部,可以使汽车的驾驶安全娱乐性能得到进一步的提高。在汽车倒车雷达发达的今天,国内外有众多科技成熟,市场良好的倒车雷达品牌,高端车品牌更是配置了多种倒车提醒方式,倒车雷达语音提醒,倒车雷达画面,鸟瞰图,倒车渐近模拟线等等,为新车司机的驾驶上路降低了不少开车的难度,但是如此多的智能化汽车电子设备仍然不能保证司机在任何环境下都保证行车的安全。
为进一步保证驻车情况下的安全,本文设计的主动式预警系统模拟场景为当自身车辆处于驻车状态时,为防止其他车辆在停车时尽管有自身倒车雷达提醒仍可能擦碰到自身,一旦检测到周围有车辆靠近自身,便启动自身车辆的车灯闪烁且鸣笛警告周围车辆,为自己和其他车辆驻车提供双重保障。
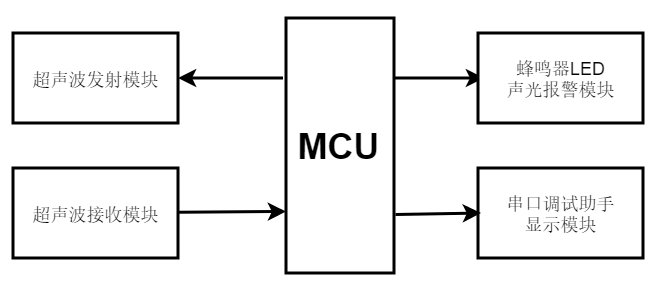
本文设计的驻车主动式预警系统由四个子系统构成:超声波测距子系统,控制子系统,灯光鸣笛提醒报警系统,串口打印调试显示系统。在车辆周围配置多个超声波测距系统即可实现周围360全方位测量,采用低功耗的超声波测距传感器和灯光蜂鸣器即可实现不断电情况下超长时间待机为车辆的驻车安全提供长期有效的保护。
本文首先论述了课题的研究背景,分析了国内外汽车倒车雷达的研究现状,其次,针对主动式预警系统各个子系统提出了多种实现方案,在比较各自优缺点后选择了最佳方案,并设计了各个子系统的结构。搭建了整体系统的硬件电路,包括单片机的最小系统,测距电路,报警电路等。利用单片机stm32f103实现了对超声波测距模块的发射和接受信号的控制,采用蜂鸣器和LED灯模拟汽车灯光闪烁和鸣笛效果。
最后,针对硬件电路完成相应的软件设计,阐述系统软件设计原理——模块化设计,然后根据硬件功能划分分别对各个模块进行介绍编程思想。主要思想是通过单片机对超声波测距工作的计时进行计算,得出测距结果最终根据测距结果与设定的报警距离比较,决定是否声光报警,完成系统所设定的功能。
关键词:驻车预警;超声波测距;串口打印;预警报警;低功耗
ABSTRACT
In recent years, the automobile electronics industry has reached saturation in recent years, but the automobile electronics industry is on the rise. The installation of electrical and electronic equipment in the car can further improve the driving safety and entertainment performance of the car. With the development of automobile reverse radar, there are many mature reverse radar brands at home and abroad, good reverse radar brands in the market, and high-end car brands equipped with a variety of reverse warning methods, reverse radar voice reminders, reverse radar pictures, aerial views, The reverse asymptotic simulation line and so on have reduced the difficulty of driving for the driver of the new car, but so many intelligent automobile electronic devices still can not guarantee that the driver is on the road. The safety of driving is guaranteed in any environment.
In order to further ensure the safety under the condition of parking, the simulation scene of the active early warning system designed in this paper is that when the vehicle is in the parking state, in order to prevent other vehicles from touching themselves even if they have their own reverse radar reminder, Once the surrounding vehicles are detected approaching themselves, the lights of their own vehicles are activated and sirens are sounded to warn the surrounding vehicles to provide double protection for themselves and other vehicles.
The vehicle based early warning system designed in this paper is composed of four subsystems: ultrasonic ranging subsystem, control subsystem, light whistle alarm system, serial port printing and debugging display system. Equipped with multiple ultrasonic ranging systems around the vehicle, the surrounding 360 omni-directional measurement can be realized. The ultrasonic ranging sensor and light buzzer with low power consumption can provide long-term and effective protection for the parking safety of the vehicle without power outage.
Firstly,my paper discusses the research background of the subject and analyzes the research status of automobile reverse radar at home and abroad, secondly, puts forward a variety of implementation schemes for each subsystem of the active early warning system, and selects the best scheme after comparing their advantages and disadvantages. The structure of each subsystem is established. The hardware circuit of the system is designed, including the minimum system of single chip microcomputer, ranging circuit, alarm circuit and so on. The transmission and receiving signal control of ultrasonic ranging module is realized by using single chip microcomputer stm32f103. Buzzer and LED lamp are used to simulate the flicker and siren effect of automobile light.
Finally, aiming at the corresponding software design of the hardware circuit, this paper expounds the principle of the system software design-modular design, and then introduces the programming idea of each module according to the division of the hardware function. The main idea is to calculate the timing of ultrasonic ranging work by single chip microcomputer, and obtain the ranging results. Finally, according to the comparison between the ranging results and the set alarm distance, we decide whether to acousto-optic alarm and complete the functions set by the system.
Key Words: Parking early warning,;ultrasonic ranging;serial port printing;early warning alarm; low power consumption
目录
第1章 绪论 1
1.1课题背景 1
1.2国内外研究现状分析 1
1.3课题研究内容及目标 4
第二章 主动式预警系统构建与方案设计 5
2.1主动式预警系统的设计要求 5
2.2系统的搭建 5
2.3系统方案的设计与比较 6
2.3.1测距方案的设计与比较 6
2.3.2控制单元的设计与比较 7
2.3.3声光报警模块的设计与比较 8
2.4本章小结 9
第三章 硬件设计 10
3.1控制系统设计 10
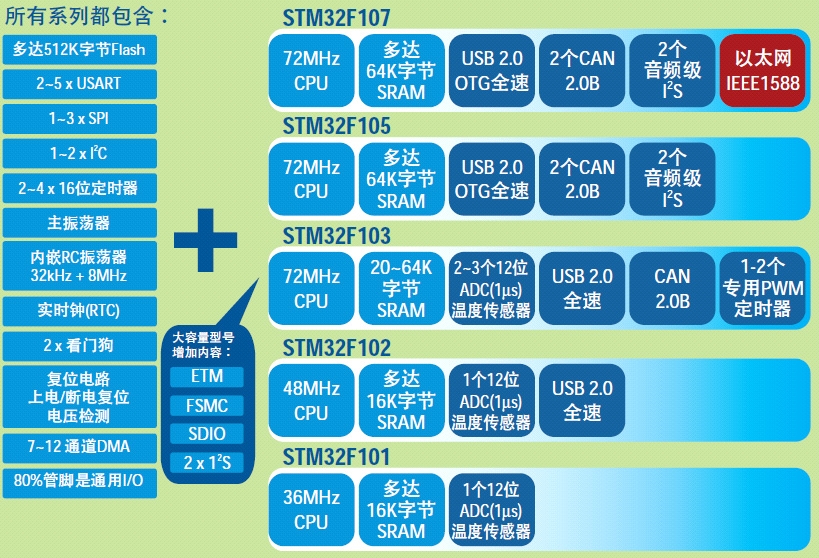
3.1.1 STM32单片机简介 10
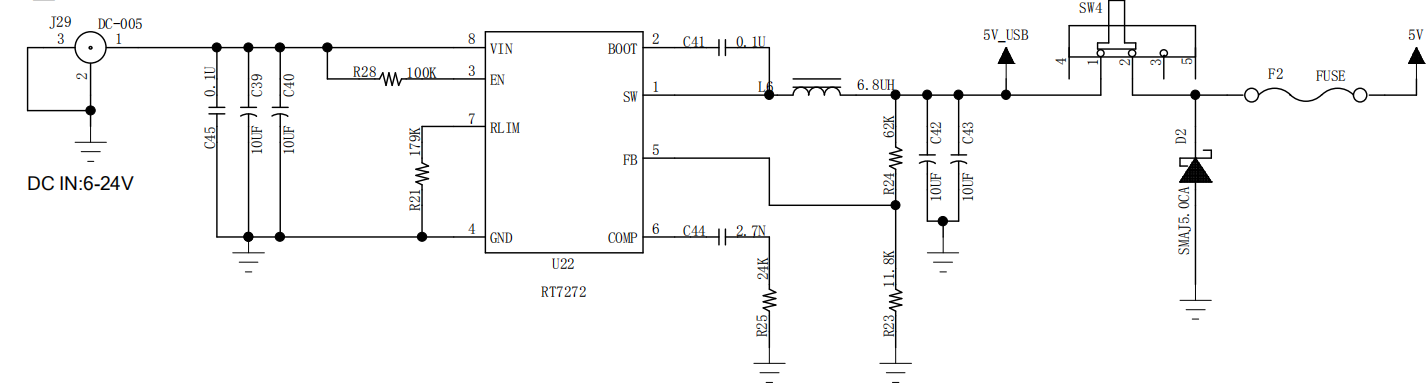
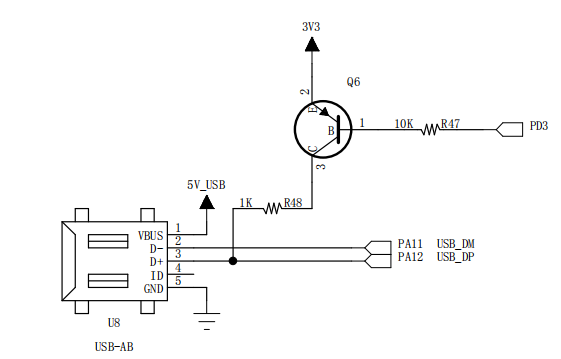
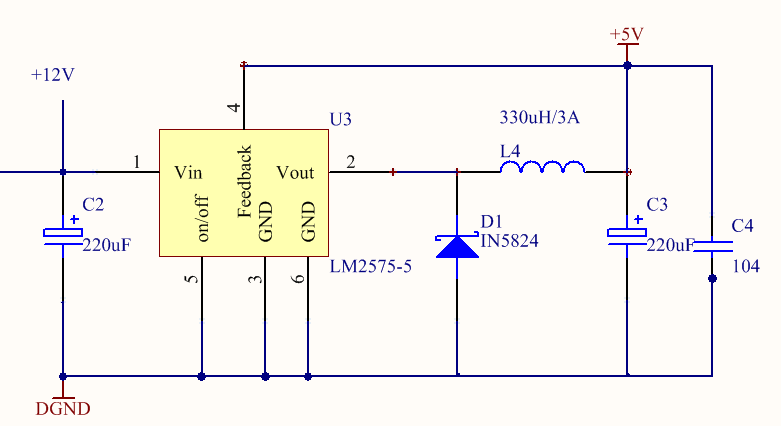
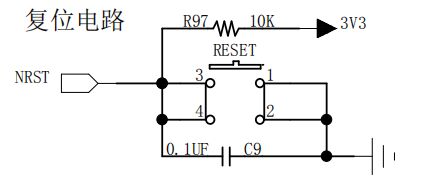
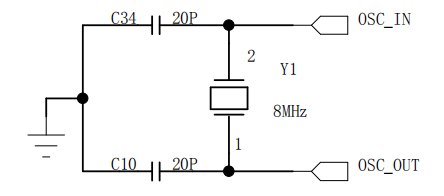
3.1.2 STM32最小系统电路设计 12
3.2 测距系统设计 14
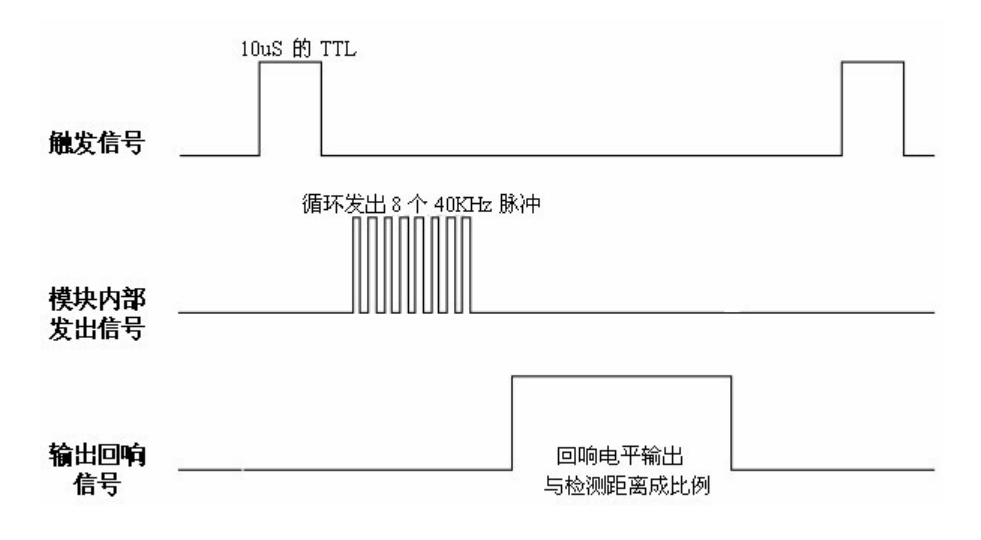
3.2.1测距系统的基本原理 14
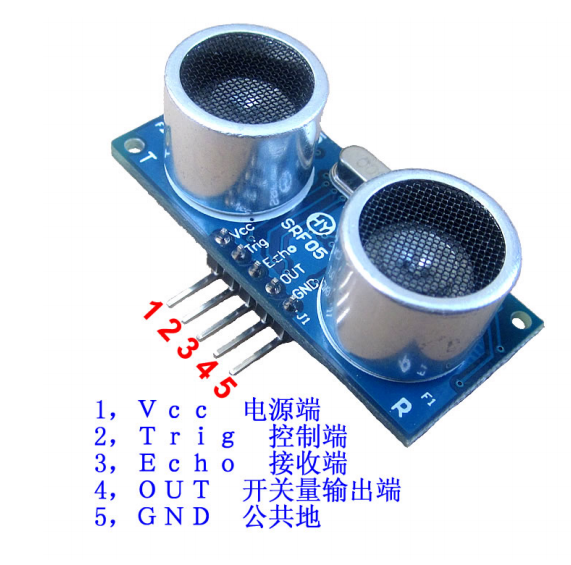
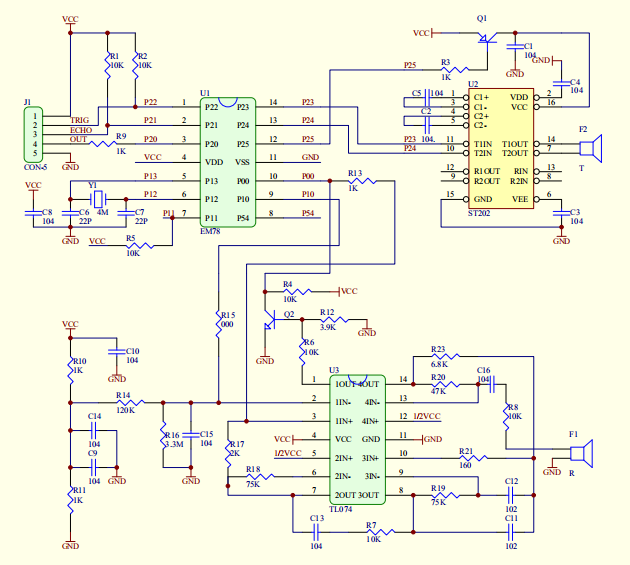
3.2.2测距系统的构成和参数 16
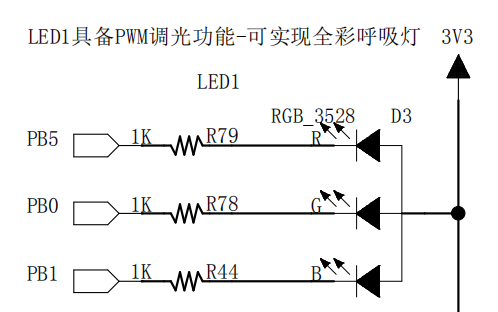
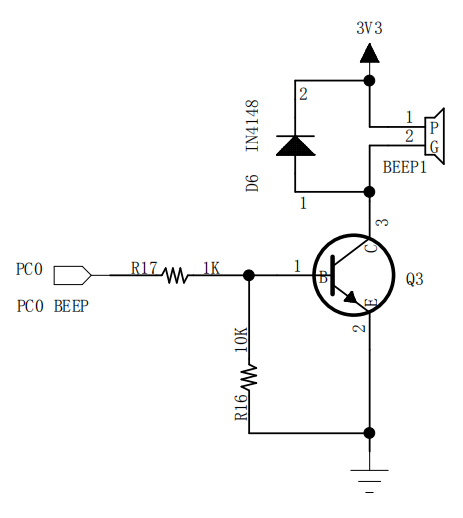
3.3报警系统的设计 17
3.4本章小结 17
第四章 系统软件设计 19
4.1软件的设计思想 19
4.1.1系统软件的实现原理 19
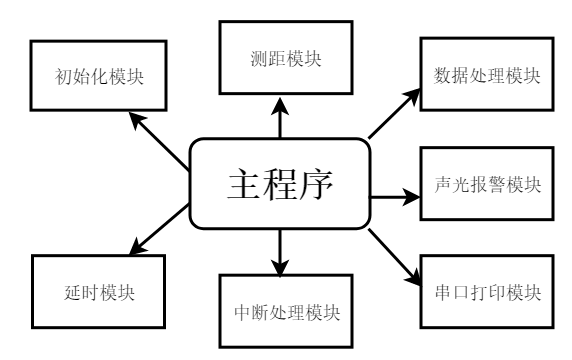
4.1.2 系统整体程序的搭建 19
4.2程序各模块设计 20
4.2.1初始化模块 20
4.2.2测距模块 20
4.2.3声光报警模块 21
4.2.4延时模块 21
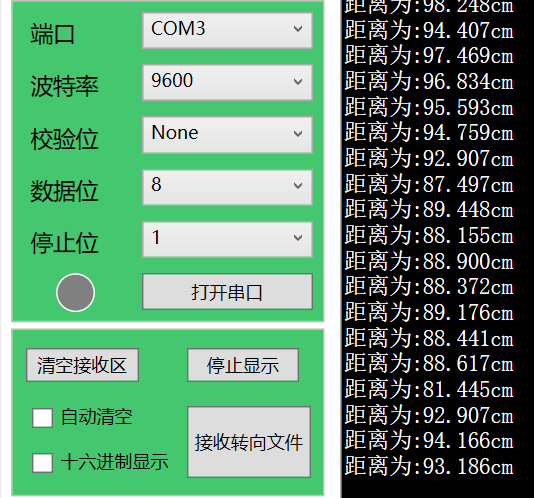
4.2.5显示串口打印模块 21
第五章 系统的试验和误差分析 23
第六章 总结与展望 26
参考文献 28
第1章 绪论
1.1课题背景
根据公安部交通管理2018年7月16发布,截6月底,全国机动车保有量达3.19亿俩辆,其中私家车保有量达1.8亿辆。自1980改革开放以来,到2003年私人汽车保有量首次达到千万辆,用了近20年,而突破2000万辆仅仅用了三年,我国汽车市场每年以平均25%的速度快速增长,已成为世界第三大汽车消费国[[1]]。这足以说明我国汽车保有量,汽车消费在最近高速发展的经济态势和人民日益提高的生活品质下以指数增长的速度发展。
伴随着私家车辆和驾驶员的增加,对相关的道路要求,技术要求,服务要求也随之提出了新的挑战。许多城市在已规划好的城市建设下,街道小区内的停车位必然是越来越少,道路也是越来越狭窄,这就对驾驶员的技术也有了一定的要求提升。但并非每个驾驶员都有足够专业熟练的技术确保行车驻车安全顺利。
传统上为确保驻车期间的行车安全,汽车装配了左右的外置反光镜和内置反光镜,但随着道路交通情况越来越复杂,身处驾驶室中的驾驶员并非时时刻刻保持清醒状态以做到眼观四面耳听八方:通过反光镜的观察,通常有视野盲区,图像畸变,一旦遇到雨雾天气,反光镜将变得模糊不堪,使得行车安全大打折扣。因此为了最大程度减少司机在倒车停车时的可能产生的碰撞问题以及提高新手司机熟练倒车的效率,自20世纪八九年代,倒车雷达得以孕育而出。倒车雷达系统主要有测距系统,主控制系统,显示报警系统等组成。其中测距系统主要用到了各式各样的传感器诸如超声波,红外,CCD高清摄像头等等。通过一代又一代改良后的倒车预警系统,能够在人眼看不到的视野盲区里为司机提供可靠的障碍物信息,测量车身与障碍物之间的距离并显示在显示装备上,当小于一定的危险距离时,将发出极其尖锐的声音引起司机的注意。再者显示报警系统是通过摄像头将车身周围的环境显示在显示屏上,供驾驶员发现周围的障碍物以保障安全无误的行车,高效的预警设计系统将会为司机有效且安心的规避行车中的擦碰等不必要的损失和风险。
1.2国内外研究现状分析
最近半个世纪,集成先进的电子电气技术在汽车领域已广泛利用,在汽车的零部件成本构成中,电气器件已达到15%,已与汽车中发动机变速器等传统核心零部件在汽车成本中分庭抗礼。[[2]]而且这个数据正随着电子技术的不断进步而逐年上升,我们肉眼可见的是:汽车的核心零部件的设计,制造技术在短时间内已经到达天花板,技术的成熟代表着生产成本的降低,而每年更新的新一代汽车中,各式各样的电控系统总是各大制造商的宣传牌面和消费者的主要关注点。由此可见,电子技术是否足够先进人性化,决定着某一款车某一个汽车制造商的生产力和竞争力,甚至反应了一个国家的生产制造水平。我国汽车领域中的电子电气行业起步较晚,与美日欧等进口汽车制造商存在不小的差距。根据中华人民共和国国务院发展研究中心发布的《中国汽车产业发展报告》,电子产品在整个新车汽车的生产成本所占平均比重分布情况大致如下:我国车辆目前为 10%,轿车平均比重已达 10%~25%,全世界车辆 35%。[[3]]这足够说明。我国与发达国家在汽车电子领域仍有很大的进步空间。
此次研究的驻车主动式预警系统是汽车电控系统中极为重要的一部分,设计到汽车停车驻车的安全问题。但是国内外因为诸多技术层次的因素仍然存在较大的差距。比如大部分国内生产厂家用到的主控制系统的芯片仍然是国外的芯片企业TI,ARM等公司的专利,测距系统中敏感度高测距距离远显像清晰的摄像头或传感器,国内仍未能自主研发。高清的液晶显示技术更是如此,有着一定的技术壁垒,依靠进口原配件必然会导致国内的组装制造商成本骤升,在进口原配件面前丧失竞争力。国内有不少研发汽车电子产品的公司,大都集中在广东地区,诸如铁将军Steel-mate,永泰和,PLC,佐敦,探路神,元润,豪迪,奇真,路标等等一系列以汽车智能电子科技产品的研发生产销售为一体的高新技术综合性企业。尽管在汽车电子产业发展的初期倒车雷达可以视为高档车的专属品,但随着汽车保有量的增加和市场的逐年扩大,电子智能及液晶显示技术的成熟,倒车预警系统不再是高档车的专利,可以下放到各类档次的车型中。如今随着倒车雷达成为汽车的标配,其发展趋势在国内极其凶猛,也有许多企业走出了国门将自己的产品出口制造力较为落后的国家地区。
这其中排名较为靠前的十大汽车电子产品中,铁将军更是行业的标杆及领军者。其公司的主打产品有行车录像仪,各式各样的倒车雷达等等电子产品。其中倒车雷达产品系列众多,包括摄像头,可视倒车雷达,倒车雷达系统,前探雷达等。可视倒车雷达是其中的明星产品,有以下功能:
OSD彩色倒车参考线,模拟倒车轨迹,泊车更加容易;字幕与图像叠加显示,清晰明了显示障碍物距离,精度可达厘米单位;抗震防水设计,全天候适用。第二种产品倒车雷达系统采用双处理器(CPU)设计,探测更加精准,公司申请防误报专利测距技术,报警更准确;还有“心跳式”蜂鸣声提示自身车体与障碍物的距离,通常与可视雷达相结合使用,为驾驶者提供更加明确的车后环境,避免到车意外的发生,倒车更加轻松便利。不仅如此,铁将军还有前探雷达系统,每次机车启动时,当踩下制动后系统功能启动,LED全彩显示距离,探头具有自检功能,有效避免追尾,防止入车出车刮擦,更能实现全方位检测。
再者是国内的哈佛SUV汽车,最新一代的哈佛F7的驻车安全系统可圈可点,前后泊车雷达,倒车影像带动态倒车辅助线,FCW前碰撞预警等一些列高科技产品让人耳目一新。DOW开门预警功能是当车辆静止或以低速(le;5公里/小时)向前方行驶时,开门预警功能通过位移传感器对相邻两侧车道后面接近的车辆、自行车灯进行探测,并在车开门前有风险时进行报警,以提示驾驶员此时请勿开门。其中较为新颖的功能则是倒车动态辅助线和360全景环视。360全景环视影像通过车身一圈的四个摄像头摄取车身周边的环境影像,影像信号经校正,处理,拼接后输送至中控屏的液晶显示屏上显示,从而辅助驾驶员安全,使其对车辆周围的环境更为熟悉,轻松地操控车辆,避免碰撞。但是仍然值得一提的是,哈佛虽然被业内业外称为国货之光,性价比之王。仍然在汽车电子方面存在瑕疵和缺陷,比如倒车影像的鱼眼畸变没有得到妥善的处理,驾驶员在显示屏上看到的视角极其不人性化,在全景影像中,选择车身某一方向的影像,车两侧的影像图像质量也较为模糊,甚至视角不够开阔,这都与零配件的层次质量有关。
国外的汽车电子产业起步较早有着成熟的供应链和相关产业的支撑,足够成熟的技术带来的低成本使得可以投入更加多的资金研发新的智能技术。早在多年前,甚至是哈佛这样的国货之光出现之前,进口汽车的标配就是倒车雷达影像系统的存在,使得进口汽车因为这一点而比国产汽车多出一大卖点。欧美汽车生产公司在汽车倒车雷达上有一系列让国产难以望其项背的技术,诸如运用了高清摄像头来采集视频图像,高效的DSP卷积处理视频并显示推送,毫米波测距仪来精准测量距离。早在多年前,国外进口汽车制造商在汽车电子方面就已经达到炉火纯青的地步,他们继续改善的便是电控系统的各式各样的零配件。比如液晶显示屏仍然被韩国的LG,三星,日本的Sharp,台湾的AUO,奇美所掌控核心技术,车载MCU微处理器的核心芯片飞思卡尔,意法半导体(ST),三星,东芝等欧美日韩高新技术企业所垄断,至于高清CCD摄像头,向来是日韩主控,佳能松下索尼三星等等企业。
国外倒车雷达的测距技术历史久远,从最早开始的红外线测距到目前电磁感应式雷达,不同原理不同效果的百花齐放。目前国外超声波测距技术在汽车上应用已经十分频繁,日产公司开发了一种专用超声波倒车装置,装置对车后距离的探测在3m左右。采用的是40kHz的超声波来探测距离。[[4]]如德国大众公司的全系车型都采用了超声波倒车雷达,在某些高端车型上甚至应用了基于倒车雷达技术的虚拟倒车和自动泊车功能。一汽大众的引进车型如迈腾 CC、高尔夫等都沿用了这些功能。例如意大利独资的汽车电子公司法雷奥为德国大众全系列车型供应倒车雷达系统,并且法雷奥公司在中国也成立了分公司,并投产国产化的倒车雷达,但硬件和软件的技术仍然掌握在意大利人手里,中国的工厂的性质只是一个大型的生产和组装车间。[[5]]美国和日本等国的大型汽车制造商也都广泛的应用了 CCD 摄像机技术、毫米波雷达测距、红外热像仪等倒车辅助技术。总体来说国外的汽车电子产业尤其是倒车雷达方面,起步早,供应链饱满成熟,成本低,技术到位,值得国内各大汽车电子厂家学习研发。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: