可视化倒车系统的设计毕业论文
2020-04-08 14:31:58
摘 要
随着汽车的日益普及,人们迫切需要一种自动便捷的可视化倒车系统以实时监控并显示车尾画面。一个先进的倒车系统,可以协助驾驶员观察和分析车后的整体情况,消除安全隐患,保障车内人员和财产的安全。
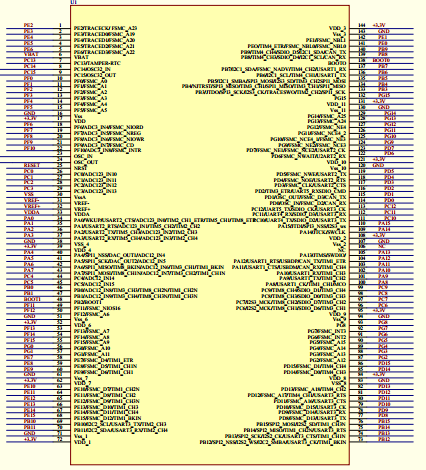
本文所建立的可视化倒车系统基于STM32型单片机微处理器,选取了OV7670摄像头摄像并通过TFT显示屏实时显示车尾画面,采用一款一体化超声波传感器作为距离检测设备。当系统开启时,摄像头实时显示倒车画面,超声传模块在阈值距离内检测到障碍物时会发出一个高电平信号进入单片机,使其控制LED灯和蜂鸣器产生声光报警的效果。
本系统具有较好的实时性和较强的抗干扰性,同时具有不错的扩展与开发能力,成本与结构合理,对推动倒车系统的自动化起到了积极的作用。
关键词:倒车系统;摄像;超声测距
Abstract
With the increasing popularity of cars, there is an urgent need for an intelligent visual reversing system to monitor and display the rear end images in real time. An advanced reversing system can help drivers observe and analyze the overall situation of the vehicle, eliminate hidden dangers and protect the safety of personnel and property in the vehicle.
The visual intelligent reversing system built in this paper is based on STM32 microprocessor. It selects the OV7670 camera and displays the car tail screen through the TFT display screen, and uses an integrated ultrasonic sensor as the distance detection device. When the system is opened, the camera displays the reverse picture in real time. When the obstacle is detected by the ultrasonic transmission module, a high level signal will be sent to the single chip microcomputer to control the effect of the LED lamp and the buzzer to produce the sound and light alarm.
The system has good real-time and strong anti-interference, at the same time it has good expansion and development ability, and the cost and structure are reasonable. It has played an active role in promoting the intellectualization of the reversing system.
Key words: reversing system; camera; ultrasonic distance measurement
目 录
第1章 绪论 1
1.1课题研究背景及意义 1
1.2倒车系统国内外研究现状 1
1.3课题研究内容与预期目标 3
第2章 基于倒车系统的超声测距 5
2.1超声波的基本性质 5
2.2超声波传感器原理及选用 5
2.2.1传感器结构简介 5
2.2.2传感器测距原理 6
2.2.3传感器的选用 8
2.3倒车车距的测量 9
2.4本章小结 11
第3章 倒车系统硬件设计 12
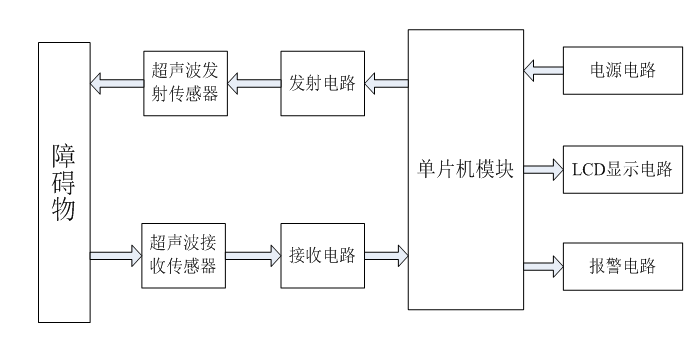
3.1系统整体方案设计 12
3.2单片机模块 13
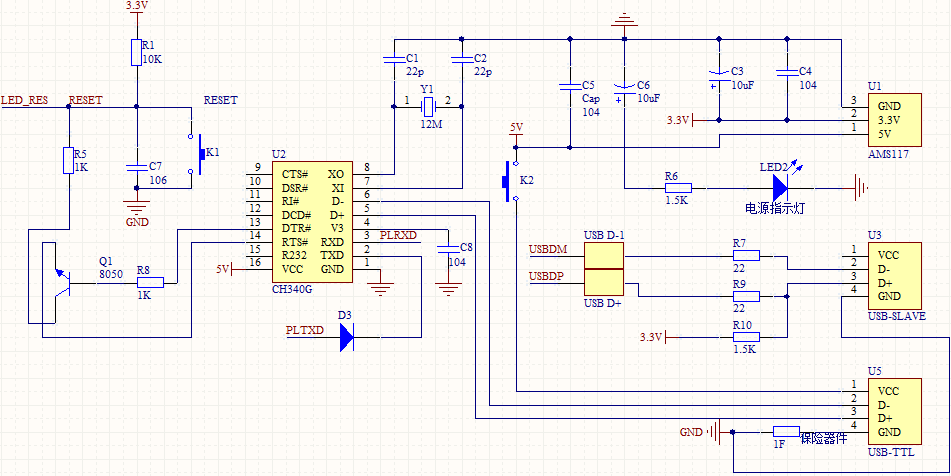
3.2.1单片机下载与复位电路 13
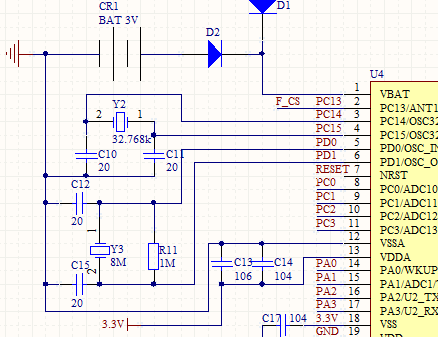
3.2.2单片机时钟电路 14
3.3摄像及显示模块 15
3.3.1 OV7670摄像头模块 15
3.3.2 TFT-LCD显示屏模块 17
3.4超声波测距模块 18
3.5指示灯及报警电路 20
3.6系统成本核算与经济性分析 20
3.7本章小结 21
第4章 倒车系统软件设计 22
4.1程序语言及开发环境 22
4.2程序整体设计 23
4.3主程序介绍 25
4.4 SCCB总线传输数据程序 28
4.5本章小结 31
第5章 倒车系统实现与分析 32
5.1元件的组装与调试 32
5.2实物展示 33
5.2.1实时图像演示 33
5.2.2距离测量演示 34
5.2.3阈值报警演示 35
5.3系统性能分析 36
5.4本章小结 37
第6章 总结与展望 38
6.1总结 38
6.2展望 39
参考文献 40
附录A元器件清单 42
附录B主程序清单 42
附录C电路原理图 42
致 谢 43
第1章 绪论
1.1课题研究背景及意义
随着现代社会的发展,汽车逐渐成为家庭中常用的交通工具。买家用车时人们也会逐渐多地考虑不同车型的安全性与方便性。通常在倒车时驾驶员会前顾后瞻,随时注意车周围环境以确保安全。但这样做既不能完全消除倒驶过程中给乘客和财产安全带来的隐患,也浪费了人力和宝贵的时间。针对某些情况下汽车倒车不方便的问题,人们出于对安全问题的考虑,对让自己的汽车有后视功能的需求日益增加。因此商家应需而生产出了各种辅助倒车的功能装置。
在辅助倒车的技术上,后视摄像和倒车雷达是主要的解决途径。后视摄像技术是利用设置在车内的显示器和车尾的摄像头实时读取车后图像。当驾驶员转到倒车档位进行倒车时,系统接收到摄像模块与换挡器相连的信号开始运行。显示屏上会将车尾图像信息进行实时显示,从而使驾驶员可以清晰地观察到车后的地形变化与障碍物阻挡,安全地完成倒车行程。倒车雷达包括超声传感器、主控制模块及报警模块。它会在驾驶员换为倒车档位时自动开启,通过处理器主要控制超声波传感器发射信号,声波在遇到障碍物后会返回。传感器的接收部分会将返回的首波信号传递到控制器,经过数据转换与处理后可以最终计算出车尾与障碍物之间的距离。系统随之根据距离的远近设置阈值,传递报警信息,使驾驶者躲避障碍物安全倒车[1]。
这两种方式互有优势[2]。后视摄像的途径可以直观地提供图像显示,但无法得到具体的距离信息。倒车雷达的途径可以较为精确地计算得到距离,但无法观察到车后方凹凸不平的地形与障碍物,加大了倒车的安全风险。如何把这两种技术有机结合起来以提高倒车的安全性,真正实现可视化安全倒车,具有很大的现实意义。
1.2倒车系统国内外研究现状
国内方面,倒车系统的研究及应用在数十年内飞速发展。由远及近,已经有了倒车喇叭、蜂鸣器、数码波段、液晶显示屏、多用雷达和高配系统六种技术产品[3]。它们在外观结构和性能方面各有特色。
第一代技术产品为倒车喇叭,通过声音提醒车辆周围的人群注意躲避。“请注意倒车”,这种声音是很多80后乃至90后儿时的记忆。从实际作用上讲,它不能算真正的倒车系统。因为它对驾驶员没有任何直接的帮助作用,现在它基本已经被淘汰,只能作为辅助功能在少数大型商用车上使用。
第二代技术产品为蜂鸣器。它通过鸣叫不同的声音来向司机报警。系统会在一定的距离点设置阈值。若倒车时障碍物在阈值距离内,系统便会运行蜂鸣器。且距离越近,蜂鸣器鸣叫的频率会逐渐增高。这是倒车系统的开端,然而驾驶员虽知有障碍物在车后,却没有语音提示或者其他方式显示距离,实际作用并不大。
第三代技术产品为数码波段显示距离。相比上一代,这代产品可以显示车后障碍物和车身的具体距离。且人和物体通常设置在不同的距离开始显示,对象为物体时开始显示的距离一般是对象为人时的两倍。第三代产品有数码显示和波段显示两种方式,较为经济实用。具体距离数据信息通常用数码显示的方式,而波段显示通常以红黄绿三色分别表示危险距离、警告距离和安全距离。该种产品做到了数码和波段的有机结合,但实际产品设置在驾驶座附近时不够简洁美观。
第四代技术产品为液晶显示屏。与前几代明显不同的是,这一代产品利用了动态显示系统。驾驶员发动汽车后,相应提示图标就会被点亮,显示屏上会显示出车辆周围的实时动态画面,且色泽鲜明,清晰美观,具有较高的灵敏度,也便于在车内安放。但该类产品精确度不高,抗干扰能力也较弱。
第五代技术产品为多用智能雷达。它能够利用高速高效的计算机24小时准确检测阈值范围内的障碍物,并且通过清晰的显示和语调不同的声音给司机距离提示。这一代产品效仿了最新的超声波雷达技术,将倒车后视显示、车内温度空气显示和语音免提电话等各类功能结合在一块,是目前市面上流通的最具智能化的雷达倒车系统。该种产品的外形体积小,不过多占用驾驶空间,便于在车内的任意位置安置。它结合了第一代到第四代产品的特点,颜色及款式多样。
第六代技术产品为高配倒车系统。之所以这样说是因为它是专为高档车配置的系统。相比于上一代产品,该种产品增加了许多新功能。它从外观上看精致小巧,从实际效用上看集成了高档奢侈轿车所具备的影音外放系统。驾驶员在堵车或者休息的时候,可以通过显示屏观看电视直播,增加了更多情致。
国外方面,德美法等欧美国家在车用电子装置的研究和发展水平已经十分之高。由于它们对于汽车制造和信息技术研究已有了一个多世纪之久,在微小电子元器件研制技术的掌握上也具有突出优势,所以这些国家的车用微小装置普及程度很高。在辅助倒车方面,国外的停车智能导航系统已经随着汽车产业的高速发展应运而生。例如德国的梅赛德斯奔驰公司已经在通过使用智能导航技术辅助驾驶者更安全快速地停车。导航雷达具有自己独树一帜的算法,可以探测并计算出经过路线上停车区域的具体位置及其距离。此时司机能够看到导航传递的信息并通过探测器的显示迅速看到空的车位。驾驶员在倒车过程开始切换到倒档后,整个汽车的具体位置和倒车角度会通过系统进行实时监控。另外,系统还将在倒车中途意外停车时通过算法自动重新计算出最佳倒驶角度和路线,体现出了倒车系统的先进化和智能化。
作为优秀的汽车产业代表之一,日本丰田公司同样研制出了智能导航系统。该系统能够进行全自动精确停车。倒车过程中,一旦倒档被切换,该系统将控制屏幕显示摄像头传输的车尾画面,并且自动选择一个最佳的停车位置。驾驶员只需点击“确认”按钮,便可松开刹车,并将手离开方向盘。智能导航系统便会自动保持速度,帮助驾驶员完成整个停车过程。若驾驶员踩下刹车,系统便会自动停止倒车,从而安全便捷地完成整个停车过程。这类系统正在被更多的企业所研制推广。
1.3课题研究内容与预期目标
在本文中研究的内容主要是为了解决可视化倒车系统的设计这一问题,除了微处理器应有的最小系统电路以外,还需主要满足这两个要求:1、需要设置一个摄像头以及显示屏显示模块来满足对于倒车画面实时显示的要求;2、需要设计一个测距模块达到阈值报警的目的。为了实现这一目标,本文首先研究了超声波传感器的结构及测距原理,根据实际情况考虑选择合适的图像传感器即摄像头模块和用于测距的超声波探测模块。同时,还需要选择合适的微处理控制器用于操控摄像头和超声波传感器工作并发出报警信号。通过本文的设计,可以达到对车尾情况在显示屏上进行实时显示,在阈值范围内进行报警且距离越近报警频率越快。本论文主要有以下章节:
第一章主要是对倒车系统进行升级和研究的必要性分析,在这个基础上通过调查和研究,了解了现如今该系统的国内外研究情况以及它的发展历程。在结合自身所学知识和考虑到成本等各项因素之后制定了初步的研究内容和预期目标。
第二章首先介绍了超声波传感器的结构及测量原理,简述了实际倒车车距的测量方法。在参考了该项技术之后对本系统主要的测距硬件进行选型,并且对于方案的经济性进行了简单的分析。
第三章的主要内容是对于整个系统的硬件结构的搭建,各个部分电路的设计以及整体电路的整合。
第四章则是在成功搭建好硬件电路的基础上,进行相应部分软件程序的编写好调试,包括编程环境的简介,各个部分的主要的流程图以及某些重要程序部分。
第五章在做好前面的工作之后,整个系统已经初具雏形,该部分的主要内容是对于元器件的组合和焊接。并且在将程序烧录至单片机之后对于所遇到的问题进行分析和解决。
第六章主要阐述了本次是设计的心得体会,对于整个过程进行总结并展望之后的学习。
第2章 基于倒车系统的超声测距
2.1超声波的基本性质
声波是一种与机械振动密切相关的通信的载体,它是通过物体以各种形式产生的振动形成波的形式对外进行传播。根据频率的大小,可分为超声波、次声波和可听声波三种类型。超声波是一种频率大于20kHz的声波[4]。
超声波与光相似,波长相对短[5]。其速度与声波基本相同。它同时可以聚焦、反射和折射,具有良好的方向性和束射性,因此能够进行加工处理和定位测量。它能检测到非常小的物体和小缺陷,并且具有高分辨率。因为它的波长越短,束波能力就越强,方向性也就越强,所以超声波检测的实用性较强,成功率较高,常用于探伤桥梁与水下工程等。普通声波产生的脉冲无法达到探测所需的脉冲宽度,而超声波可以像信号发生器一样产生满足需要的窄的脉冲,从而能够提升检测的分辨率和精密程度。超声波的功率较大,能够产生并传递很高的能量,且它的频率越大,作用到的物体内部分子的频率与之相同,移动速度也会越快,释放出的能量就越大。根据实验显示,动作对象所获得的能量是物体中分子运动速度乘方的整数倍。
2.2超声波传感器原理及选用
2.2.1传感器结构简介
由于超声波是线性传播的,且波传播过程中频率越高,散射越弱,反射越强。针对这一特点,不同类型的超声波传感器应需被设计出。根据超声波的不同形式,市场上常用的超声波传感器主要分为两类[6]。一种是由机械振动产生的,另一种是通过电子装置产生的。本课题选用压电超声波传感器作为电子装置的传感器进行了设计。
超声波传感器结构图如下:
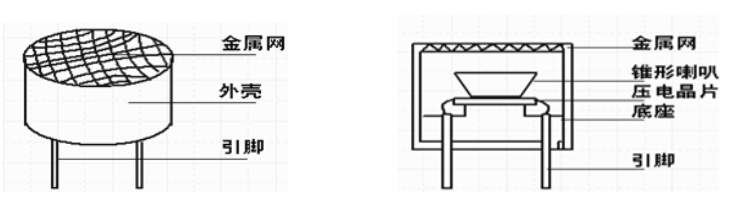
图 2.1传感器整体结构图 图 2.2传感器内部结构图
这种类型的传感器具有正方形双晶片结构。它通过一对压电陶瓷片以不同的极化方向粘在一起,其中一个陶瓷片伸长,另外一个就会缩短。它的两个面上涂有薄膜电极, 电极的上方用引线接到其中一个电极端, 电极的下方经过振动板连接到另一个电极端。双晶振子的左右两侧由弧形凸部的两个节点支撑,具有很好的方向性。因此在传感器工作期间发送超声波的效率非常高。当接收到超声波时,振子的中心集中了超声波的全部振动,因而传感器可以生成高频率和高效率的电压。
2.2.2传感器测距原理
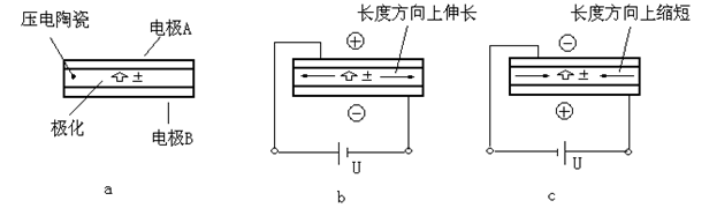 超声波传感器的距离测量原理是逆压电效应和顺压电效应[7]。如图 2.3所示,当施加一定的电压时,应变被施加到压电元件。压电陶瓷中的极化正电荷与图a所示压电陶瓷的部分所施加的正电荷,在图b所示极性的电压之下是互斥的,以同样的方式,若均为负电荷也会产生排斥作用。随之压电陶瓷会有一种被压瘪的效果,导致 其宽度变大厚度变小。若施加的外部电压极性正负相反时,如下图 c 所示, 则压电陶瓷在厚度与宽度上产生的效果与上述相反。
超声波传感器的距离测量原理是逆压电效应和顺压电效应[7]。如图 2.3所示,当施加一定的电压时,应变被施加到压电元件。压电陶瓷中的极化正电荷与图a所示压电陶瓷的部分所施加的正电荷,在图b所示极性的电压之下是互斥的,以同样的方式,若均为负电荷也会产生排斥作用。随之压电陶瓷会有一种被压瘪的效果,导致 其宽度变大厚度变小。若施加的外部电压极性正负相反时,如下图 c 所示, 则压电陶瓷在厚度与宽度上产生的效果与上述相反。
图 2.3压电效应
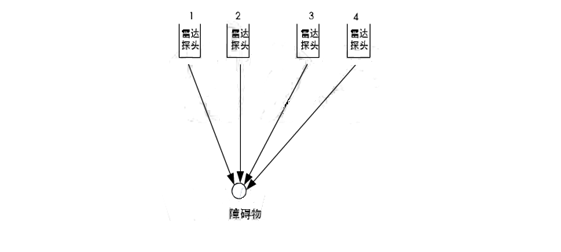
超声波检测有很多种方法,如声波幅度检测、相位检测和回波检测。本课题采用回声探测法进行设计。由于超声波是一种声波,其速度v与环境温度有关。实际探测时,若对测距的精度要求很高,则应当设置温度补偿的装置对测量所得的数值进行校正;如果传播过程中介质温度不明显,则可以认为其速度基本不变。首先,传感器的发射器部分将超声波发射到期望的范围,并且计数器开始计时。超声波是借助于空气介质传播的。途中到达测量目标或经过障碍物阻挡会立即进行反射。传感器的接收器部分将接收脉冲并在此时停止计时。此时测得的时间即为往返时间t,再由已知的速度v,即可计算得出最后的距离。具体测距方法与计算公式如下[8]。
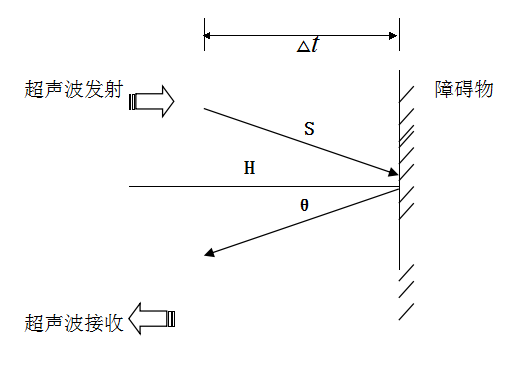
图2.4传感器测距过程图
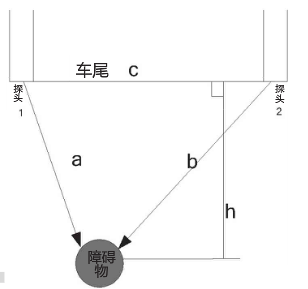
 由上图可知,
由上图可知,
 (2.1)
(2.1)
(2.2)
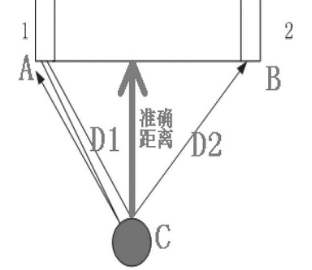
式中:L——两测距探头中心距离的一半。
又已知超声波传播的总距离为:
 (2.3)
(2.3)
式中:t——超声波从发射到接收的总时间测量;
v——超声波的传播速度。
 将式(2-2)、式(2-3)代入式(2-1)中,可得:
将式(2-2)、式(2-3)代入式(2-1)中,可得:
(2.4)
式中,在特定温度下(例如在30℃,V=349.48 m/s),超声波的速度是恒定的。
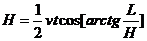
 则当所需测量的距离H远大于两探头半中心距L时,则式2.4变为:
则当所需测量的距离H远大于两探头半中心距L时,则式2.4变为:
(2.5)
因此,我们可以通过测量超声波传播时间t来计算被测距离H。
2.2.3传感器的选用
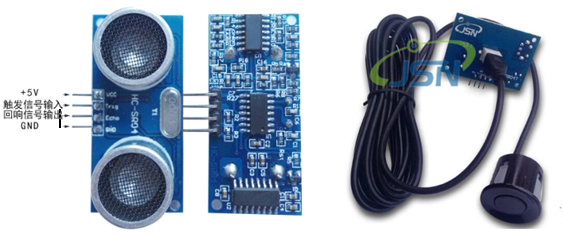
由超声波测距的原理可知,良好的超声波传感器应该完成超声波脉冲的发射和超声波回波的接收与精确检测。传感器类型根据收发结构划分可分为收发分立式传感器和收发一体式传感器。实际元器件分别为HC-SR04分立式超声波测距模块和JSN-SR04T一体化超声波测距模块。具体实物分别如下所示。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: