基于单片机的无线遥控车的设计毕业论文
2020-04-08 12:36:23
摘 要
无线遥控技术是在电子电工技术迅猛发展的前提下,应运而生的一门技术。其通过无线方式对数据进行传输,从而实现对目标的控制。在信息化的今天,无线遥控技术开始应用于生产生活的各个方面,无线遥控的方式也愈来愈多样化、智能化。
本次毕业设计是基于单片机控制的无线遥控小车。综合多方面的考虑,我在此次设计中采用STC89C52单片机的最小系统、HC-05的蓝牙模块、L298的电机驱动模块、电源模块、电机测速模块以及报警模块组成。LCD1602显示屏上显示小车前方障碍物的距离,手机蓝牙与小车进行配对后进入蓝牙无线遥控模式。可以控制小车完成前进、后退、左转及右转功能。小车具有控制稳定性高、操作方便等优点。
关键词:单片机;无线遥控小车;蓝牙遥控
Abstract
Wireless remote control technology is a technology that came into being on the premise of rapid development of electrical and electronic technology. It transmits data wirelessly to achieve control of the target. Today, informatization, wireless remote control technology has begun to be applied to all aspects of production and life, and wireless remote control methods have become increasingly diversified and intelligent.
This graduation design is based on a single-chip microcomputer controlled wireless remote control car. Comprehensive considerations, I used the STC89C52 microcontroller in the design of the smallest system, HC-05 Bluetooth module, L298 motor drive module, power module, motor speed module and alarm module. The LCD1602 shows the distance of obstacles in front of the car. After the Bluetooth of the mobile phone is paired with the car, it enters the Bluetooth wireless remote control mode. You can control the car to complete forward, backward, left turn and right turn functions. The trolley has the advantages of high control stability and convenient operation.
Key words: SCM; wireless remote control car; Bluetooth remote control
目录
第一章 绪论 1
1.1研究背景及意义 1
1.2无线遥控小车国内外研究现状 1
1.3课题研究内容与预期目标 3
第二章 系统方案设计 4
2.1系统硬件选型 4
2.1.1主控模块的选择 4
2.1.2无线遥控小车车体的选择 4
2.1.3遥控方式的选择 5
2.1.4电机驱动芯片的选择 5
2.1.5避障模块的选择 7
2.2系统的整体方案设计 7
2.3系统成本核算与经济性分析 8
2.4本章小结 8
第三章 系统硬件设计 9
3.1主控制模块设计 9
3.1.1单片机的时钟电路 9
3.1.2单片机的复位电路 9
3.2蓝牙模块的电路设计 10
3.3电机驱动模块电路设计 11
3.4报警系统电路设计 12
3.5避障模块电路设计 13
3.6电源部分的设计 13
3.7本章小结 14
第四章 系统软件设计 15
4.1软件设计程序语言和开发环境 15
4.2程序整体设计 15
4.3无线遥控模式程序设计 16
4.4自动避障模式程序设计 17
4.5本章小结 17
第五章 硬件焊接与调试 18
5.1元件的焊接与调试 18
5.2实物演示 18
5.2.1无线遥控小车避障模式演示 19
5.2.2无线遥控小车蓝牙遥控模式演示 19
5.3本章小结 20
第六章 总结与展望 21
6.1总结 21
6.2展望 21
参考文献 23
附录A 程序清单 25
附录B 元器件清单 25
附录C 电路原理图 25
致谢 26
第一章 绪论
1.1研究背景及意义
进入21世纪,随着汽车工业的迅猛发展,汽车生产技术不断完善,对自动化的需求也愈来愈大。在智能遥控小车以及在其基础上研发出的产品在自动化生产生活中占据愈来愈重要的地位。随着工业的迅猛发展及人们生活需求的不断增长,我们在日常的生产生活中经常遇到很多情况:由于恶劣的外部环境及威胁人类安全的环境的存在,人们往往不能很方便的在这种现场进行作业,或者存在人们作业效率较低等问题,就会造成不可避免的损失。所以具有自动行驶、环境感知、规划决策的无线遥控小车在工程中愈来愈多的被运用。这是一种将信息、自动化、通信、计算机等多门学科综合运用的技术,是高新技术的集合体。
传统的无线遥控小车主要用于运输、侦察。通过对小车进行控制对小车进行一定的操作。但在实际应用中,却存在着无法实时了解路况,导致小车收到障碍物阻挡、小车运行偏移轨道等问题。在电工电子技术的迅猛的今天,无线遥控技术得以在生产生活中愈来愈多的运用,新型的大规模的遥控集成电路逐渐出现。就从愈来愈智能化的遥控装置来说,早年间更多的是使用分立元件、集成电路到目前非常流行的单片微型计算机。人们不断增长的需求就要求小车更加智能化,自动化,能够更加贴近人们需要。在拥有无线遥控技术后,人们可以更方便的对目标实施远程控制。使小车可以在环境恶劣或危机人们安全的地方作业,甚至使工程作业更加精准,更加准确。这无疑会提升提升现代工业生产生活的效率,更加节约时间。
1.2无线遥控小车国内外研究现状
美国在20世纪60年代最早在工业上运用无线遥控小车,在政府积极推动研发无线遥控技术及其相关技术的情况下,美、德、日及其他工业强国智能无线遥控车的技术在世界居于领先地位。已经将无线智能小车广泛应用于反恐、军事侦察、环境污染、救灾抢险及危险和恶劣环境中。其发展历史可以分为三个阶段:
第一阶段是初始阶段,在上世纪50年代,美国最先在智能遥控车方面开始投入研究:1954年美国Barrett Electronics公司研发了世界上第一台自主引导小车系统AGVS(Automated Guided Vehicle System)。此系统是一个已经具有了无人驾驶的特征,且是一个在固定线路上运行的拖车式运货平台。提升运输的自动化水平是早期研究AGVS的初衷。在全球计算机技术及传感器的迅猛发展的情况下,智能遥控车的研究又上升到了新的高度。
第二阶段是从上世纪80年代中后期:这个时期世界主要发达国家对智能遥控车的研究都有了极大的飞跃。1995年美国成立了NAHSC(国家自动告诉公路系统联盟),其主旨之一便是推进智能遥控车的研究,并推进智能遥控车技术进入实用化。在欧洲,对智能遥控车领域的探索开始于1986年的普罗米修斯项目。亚洲对此项目最早的研究始于日本。为了研究汽车自动导航的方法,在1996年日本成立了高速公路先进巡航驾驶研究会[1]。正是因为这个研究会,日本智能遥控车技术获得了整体的发展。以80年代中后期为分界点,全球逐渐兴起了智能遥控车研究的浪潮。
从上世纪90年代开始是智能遥控车研究的第三阶段。在这个阶段期间,智能遥控车技术得以迅猛发展,也随即进入了系统、深入、大规模的研究阶段。其中,美国卡内基.梅隆大学机器人研究所研究成果巨大,完成研究了Navlab系列的遥控车有10辆之多,这一研究也取得了举世瞩目的成绩。
目前,研究发展正处于第三阶段。这阶段的研究成果代表了当前世界智能遥控车的主要研究方向。其中,比较具有代表性的有:1985年德意志联邦大学研究的第一辆VaMoRs智能车辆在高速公路上以100km/h的速度进行测试,通过机器视觉来保证纵向和横向的控制[2]。1988年,都灵的PROMRTHEUS项目会议上,对维塔(VITA)进行展示,该小车可以完成自动行进、停车,同时可以向其他车辆传达相关驾驶信息[3]。上述两种车都配备了UBM双目视觉系统,具有相当高的稳定性。
我国的无线遥控车研究相较于发达国家来说起步比较晚,是从20世纪80年代开始的。而且绝大多数研究还处在针对某项技术研究阶段。这导致我国在这方面的研究上还被发达国家远远甩在身后,而且仍然存在着一定的技术差距,不过我国还是取得了一系列值得骄傲的成果。主要成果有:
(1)在2003年国防科技大学和中国第一汽车集团公司联合研制了我国第一辆自主驾驶汽车。这辆车能够以最快13km/h的稳定速度,最快170km/h的峰值速度在正常情况下的高速公路行驶[4]。而且此车具有超车功能,总体性能指标已达世界先进水平。
(2)清华大学、浙江大学、国防科技大学、北京理工大学、南京理工大学等多所高校联合研制了7B.8军用室外自主车,这辆车装有激光雷达、陀螺惯导定位、彩色摄像机等传感器[3]。计算机采用两台Sun10进行路径规划、信息整合,同时,两台PC486完成激光信息处理和路边抽取识别,8098单片机实现车辆自动驾驶和定位计算。车的体系结构以水平式结构为主,其直线跟踪速度可达20km/h,避障速度可达5-10km/h[5]。
智能遥控车是智能交通系统(ITS)的重要技术,近年来,国内的许多科研院和高校在进行ITS研究[6]。目前,我国已形成一支ITS研究开发的专业团队。并且我国已经愈来愈重视对ITS技术的研发投入。经过相关领域的努力,我国智能遥控车研究技术定会取得长足的进步。
1.3课题研究内容与预期目标
本次的毕业设计主要任务是完成无线遥控小车的制作,本次毕业设计将以STC89C52单片机作为小车系统的控制核心,综合自动控制、电路原理、小车驱动原理、车速的检测和蓝牙无线通信原理等知识,完成系统硬件电路和部分软件的设计,实现实时控制车的前进、后退、转弯等运动,能显示车速,能够自动避障等功能。车的遥控范围应不小于10米。本次设计的硬件电路部分由多个模块构成,分别为主控制模块、车速检测模块、电机驱动模块、避障模块以及蓝牙通信模块。为实现上述功能(1)需要运用模块化的思想,将整个系统分成不同的模块,对各个模块进行建立;(2)将各个模块组合成整体的电路,并对整体的电路进行调试。为实现这些目标,本篇文章将讲述如何选用各个芯片,以及各个模块如何协作实现上述功能。通过本文的设计,可以达到在LCD1602显示屏上实时显示小车状态。本文主要有以下章节:
第一章介绍本文的研究背景及研究现状,对无线遥控车的研究必要性及研究方向进行简要的分析,了解其研究历史,并结合课题要求和自身所学知识进行初步的针对性的设计及预期的目标。
第二章将综合多项参考数据后对本设计所使用的硬件模块进行选择。并对本设计各个模块选择的经济性进行分析,选择出最适合本次设计的各个模块。
第三章将对整个设计的硬件部分进行详细的说明,包括各个硬件结构的搭建,逐个电路部分的设计和整体电路的整合。
第四章主要是在本次设计的硬件电路设计完成的基础上,对软件部分进行进行设计以达到相应的功能。并将以流程图的形式对软件设计的思路进行解读。
第五章是对硬件元件的焊接、对软件部分的调试以及整个实物的演示效果的介绍。并此过程中会遇到一些问题,本章也会对这些问题进行分析,提出合理的解决方法,并且总结经验在以后的学习中减少问题的出现
第六章将对本次设计进行全方位的总结,针对设计过程中出现的问题进行总结与改进。此外,我还会对今后的学习进行展望。
第二章 系统方案设计
2.1系统硬件选型
本次毕业设计的系统的组成有单片机主控模块、电机驱动模块、电源模块电路、避障模块和无线遥控模块,下面介绍实现此系统功能的方案。
2.1.1主控模块的选择
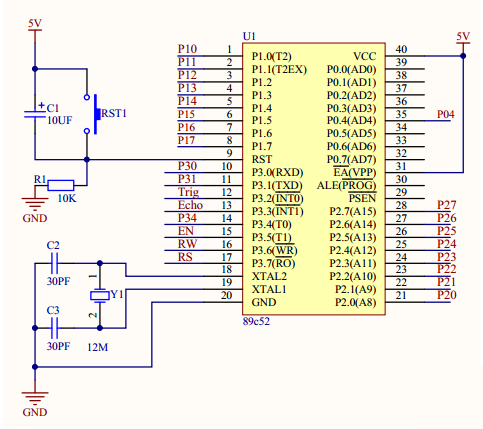
采用单片机STC89C52作为整个系统的主控制模块。它是STC89C51单片机改进后的产品,可以执行89C51相同的代码指令,同时较89C51有更高的性能。和89C51相比,89C52多有一个定时器,这可以使得其在串行通信时可以设置更高的比特率。并且其存储空间也是89C51的两倍。由此可见,此款单片机就拥有资源比较丰富、可进行位寻址操作及具有较强大的控制功能等优点。STC89C52的 32个通用I/O口都能够按位进行寻址,其程序空间最大可以达到8K,同时其位操作指令的功能十分强大,这些功能对于本设计绰绰有余,此外,STC89C52相对低廉的价格也是本次设计选择的重要原因之一。
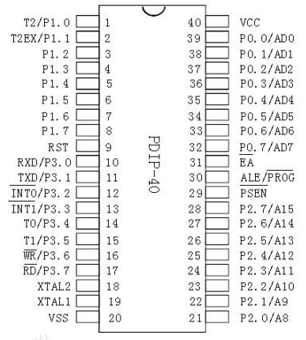 STC89C52引脚图如图2.1所示
STC89C52引脚图如图2.1所示
图2.1 STC89C52引脚图
2.1.2无线遥控小车车体的选择
本次设计采用了购买现成的车模的方案。经过认真的思考与分析,我制定了左右两轮分别驱动,后轮为万向轮转向的小车模型方案。也就是说,用两个直流驱动电机以完全相同的型号、转速和力矩等参数对小车左右两个前车轮进行驱动,与此同时,在车后面装一个万向轮起到平衡作用。当这样设计时,当两个直流电机以相同的转速但反方向旋转时,就可以实现遥控小车在适当位置的旋转,这样可以很容易的实现小车原地的转向。
2.1.3遥控方式的选择
方案1:
采用红外遥控控制,接收头采用1838B,遥控采用市面上的简易型红外遥控器。红外遥控有方向性的缺点,因此放弃了此方案。
方案2:
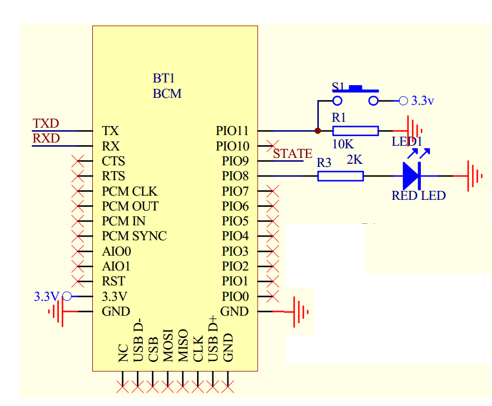
采用蓝牙模块无线遥控,蓝牙的抗感染性强,通信稳定性高,采用蓝牙通信不受阳光和方向的限制。本设计采用的蓝牙模块HC-05是专门用做智能无线数据传输的,主要用于一些短距离的无线数据传输领域。此类模块既可以用于两个蓝牙模块之间的数据通信,也可以和PC机的蓝牙实现通信。HC-05蓝牙模块可以直接代替串口线,这样就避免了不必要的线缆连接[7]。HC-05蓝牙模块使用的是TTL串口通讯,模块中有一个可以进入AT状态的引脚,该引脚高电平有效。而且该模块内置PCB射频天线,具有体积小、成本低、收发灵敏度高及功耗低等特点,本设计的功能要求只要再配合少许外部元件便可以实现。
通过上述比较,最终选择了方案2。
2.1.4电机驱动芯片的选择
方案1:
采用SM6135W电机遥控驱动模块来控制直流电机,SW6135W是专门为遥控小车所设计的大规模集成电路,能实现前进、后退、加速、向左、向右五个功能,但其使用的是编码输入控制方式,而不是电平控制方式,如果选择这个方案,那么程序的设计并不容易实现。此外,该电机驱动模块价格比较高,不符合本次设计的经济性要求。
方案2:
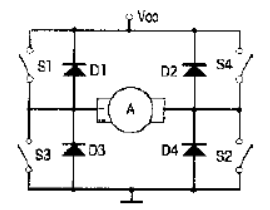
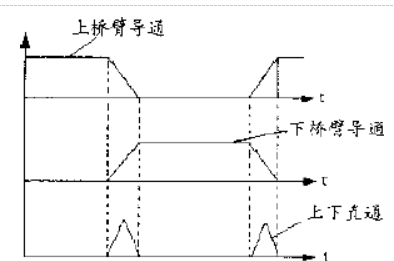
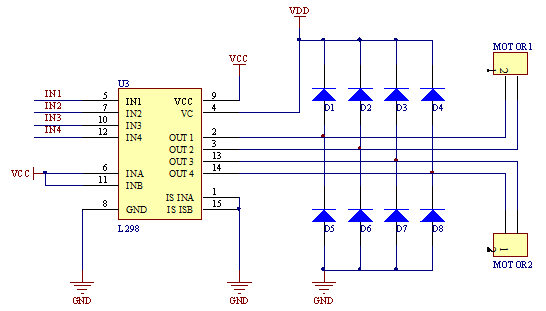
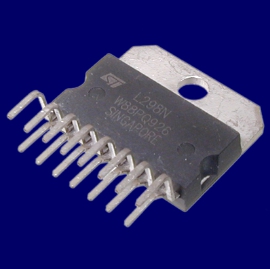
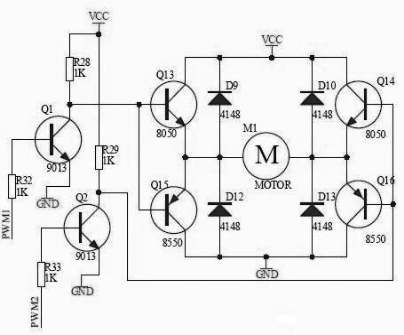 采用功率三极管来作为功率放大器的输出控制直流电机。线性驱动电路的电机加速能力较强,并且其原理和结构比较简单。所以,我们可以采用如图2.2所示的达林顿管构成的H型桥式电路。当达林顿管可以再单片机的控制下使其占空比可调,那么便可以方便、精准地调整直流电动机的转速。这样,电路会处于达林顿管的饱和截止状态下工作,这种情况下其工作效率会很高。采用H型桥式电路既保证了方向的控制和实现转速,而且由于电子管的开关速度极快,同时也会加强稳定性,这种技术使PWM调速技术,目前大范围采用的正是这种技术。因此我选用了如图2.3所示的L298N芯片,L298N是具有较高电压和较大电流的全桥式驱动芯片。它具有控制使能端,所以可以进行选择控制。同时,该芯片的频率相对较高,所以在本次设计中便可以用一个芯片去控制两个直流驱动电机。因此运用L298N芯片来作为电机驱动芯片,具有性能优良、稳定性好、操作方便等优点[8]。
采用功率三极管来作为功率放大器的输出控制直流电机。线性驱动电路的电机加速能力较强,并且其原理和结构比较简单。所以,我们可以采用如图2.2所示的达林顿管构成的H型桥式电路。当达林顿管可以再单片机的控制下使其占空比可调,那么便可以方便、精准地调整直流电动机的转速。这样,电路会处于达林顿管的饱和截止状态下工作,这种情况下其工作效率会很高。采用H型桥式电路既保证了方向的控制和实现转速,而且由于电子管的开关速度极快,同时也会加强稳定性,这种技术使PWM调速技术,目前大范围采用的正是这种技术。因此我选用了如图2.3所示的L298N芯片,L298N是具有较高电压和较大电流的全桥式驱动芯片。它具有控制使能端,所以可以进行选择控制。同时,该芯片的频率相对较高,所以在本次设计中便可以用一个芯片去控制两个直流驱动电机。因此运用L298N芯片来作为电机驱动芯片,具有性能优良、稳定性好、操作方便等优点[8]。
图2.2 H型桥式电路
 综上所述,我们选用了方案2。
综上所述,我们选用了方案2。
图2.3 L298芯片
2.1.5避障模块的选择
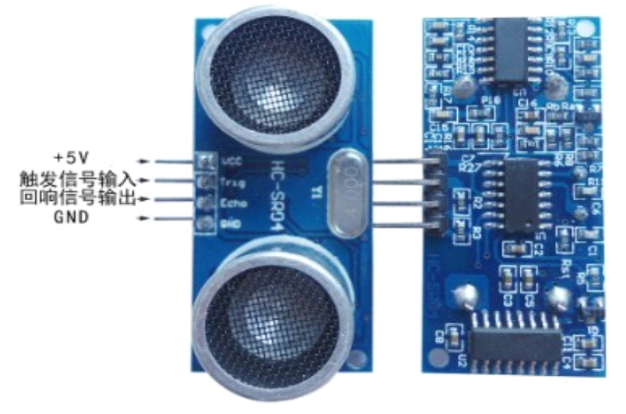 采用HC-SR04超声波测距模块可以实现避障的操作,该模块通过对进行前方的障碍物进行测距,从而实现避障功能[9]。该模块能够提供2-400厘米的距离感测功能,测距精度可以达到到3毫米[10]。模块由超声波发射器、接收器和控制电路三部分组成。可以满足测距要求。在设置阈值后,当距离小于阈值时,即可实现避障。
采用HC-SR04超声波测距模块可以实现避障的操作,该模块通过对进行前方的障碍物进行测距,从而实现避障功能[9]。该模块能够提供2-400厘米的距离感测功能,测距精度可以达到到3毫米[10]。模块由超声波发射器、接收器和控制电路三部分组成。可以满足测距要求。在设置阈值后,当距离小于阈值时,即可实现避障。
图2.4 HC-SR04超声波测距芯片实物图
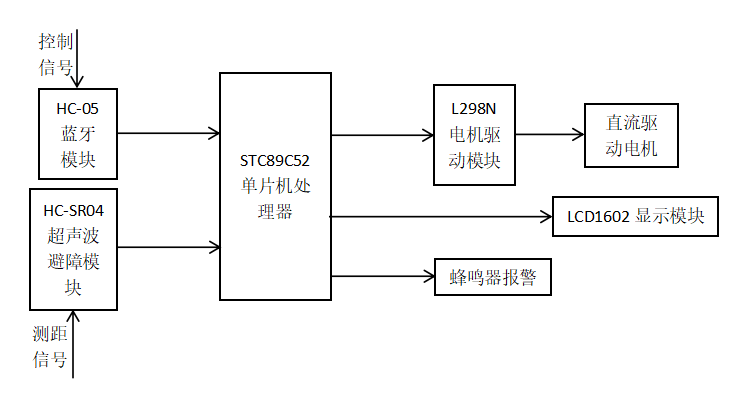
2.2系统的整体方案设计
在将各个硬件模块选型完毕后,综合任务书的要求及任务的适当扩展。我将本次毕业设计总体上分为了以下几个方面:
(1)将STC89C52作为本次设计系统的控制核心,用于控制各个硬件部分,并能够实时处理和接收数据;
(2)无线遥控电路主要由HC-05蓝牙模块、L298N电机驱动芯片、LED灯和驱动电机组成,当手机与蓝牙建立通信,手机发出指令时,指令信号通过蓝牙模块传到单片机内,单片机输出控制信号经过L298N芯片驱动电机完成相应的指令。
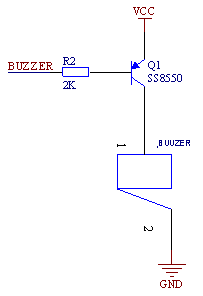
(3)避障电路由HC-SR04超声波测距传感器、驱动电机、L298N电机驱动芯片和蜂鸣器组成,系统设定小车前方10cm有障碍物时自动避障,当小车前方障碍物距离小于10cm时,产生报警信号并传入单片机,单片机发出指令使蜂鸣器报警,同时触发驱动电机使小车右转,实现自动避障功能。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: