传感器网络串行通信系统对定时和拓扑变化的高容忍度外文翻译资料
2022-11-29 15:45:24
英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
窗体顶端
传感器网络串行通信系统对定时和拓扑变化的高容忍度
- Bartley, S. Tanaka, Y. Nonomura, T. Nakayama, Y. Hata and M. Muroyama
Tohoku University, Sendai, Miyagi, Japan
Toyota Central Ramp;D Labs., Inc., Nagakute, Aichi, Japan (Currently, Meijo University)
Toyota Motor Corporation, Toyota, Aichi, Japan
Toyota Central Ramp;D Labs., Inc., Nagakute, Aichi, Japan
摘要 : 本文介绍了使用延迟窗口时钟和数据恢复(CDR)算法的第一个有线传感器网络,该算法允许网络节点在没有高精度嵌入式时钟或全局时钟的情况下进行通信。 网络拓扑结构的变化导致传感器节点的传输速率发生变化。 网络测量的平均数据周期范围为738.79 ns至811.25 ns,周期性抖动标准偏差(PJ)范围为0.7640 ns至24.01 ns,具体取决于拓扑结构。 尽管PJ很高,但是从传感器节点发送的数据在所有测试情况下均成功恢复,无需修改CDR。
- 引言
对于机器人应用的触觉传感器系统的重要要求是该系统能够符合机器人的表面。 为了达到这个要求,基于柔性带状电缆的传感器系统被开发出来,可以缠绕机器人的表面[1]。 每个带有大规模集成(LSI)电路和MEMS传感器的传感器节点位于功能区上的不同位置,节点轮流通过共享总线发送串行传感数据。 共享总线也为传感器节点供电。 该方案允许相对简单的系统实现。 传感器网络可以预制而没有特定的目标几何形状,并通过将带状电缆缠绕在需要传感器的表面上与现有系统集成。 还有一定程度的容错能力,因为如果传感器节点发生故障,网络可以继续正常运行。
但是,这样的系统也提出了一些挑战。 一个这样的挑战是确保所有的传感器节点都具有用于电路操作的时钟信号。 对于具有数百个传感器节点的有线传感器网络来说,在整个网络中分配全局时钟信号的总线面积和功率方面将是昂贵的。 出于这个原因,避免了全球公交时钟。 另一种选择是在每个传感器节点中安装一个高精度时钟发生器。 然而,传感器节点设计上功率和面积的增加将乘以网络中的传感器数量,并且还会导致共享总线电源的显着压降。 而且,为了实现传感器节点的高密度放置,它们的尺寸应该尽可能小。 出于这个原因,在传感器节点中避免使用传统的基于晶体振荡器的时钟发生器。
另外,如果要在传感器节点中使用基于低精度RC振荡器的时钟发生器,这将允许降低功耗和总线面积,同时还保持传感器节点的功耗和面积低。然而,由于高时序变化,这样的系统对于节点之间的串行通信提出了困难的挑战。问题是传感器节点之间的任何过程,电压或温度(PVT)变化都会影响内部时钟频率。这会导致来自传感器节点的串行传输的数据速率的变化。因此,传统的数字时钟和数据恢复(CDR)算法(如直接相位采样或平均相位采集[2])不能用于可靠地恢复数据。此外,因为来自不同传感器节点的数据速率可能变化很大,并且由于需要较短的锁定时间,所以基于PLL的CDR不合适。而且,为了易于使用和处理技术之间的便携性,期望数字CDR电路。
由于现有技术不能满足这些要求,因此开发了延迟窗口(DW)CDR算法[3]。 该算法的原理是设置时序窗口以跟踪串行信号的预期转换。 窗口的持续时间基于过采样率来计算,过采样率可以是大于或等于3的任何实数。串行信号中检测到的每个边沿纠正CDR的时序,以防由于抖动而累积一些误差或 漂移。 通过实施一个两阶段的数据包恢复过程(1)beta估计和(2)数据恢复,可以有一个很宽的跟踪范围。 该算法还允许较短的锁定时间并对周期性抖动具有较高的容忍度,因此非常适合用于所提出的传感器网络。
本文将介绍传感器系统架构在第二节。第三节介绍了实验装置,其中通信系统在几种网络配置中进行了测试。在第四节中,介绍了实验数据,包括系统的拓扑结构如何影响其他设计考虑因素。 最后,第五节总结了这篇文章,其中强调了调查结果的重要性。
- 传感器系统构架
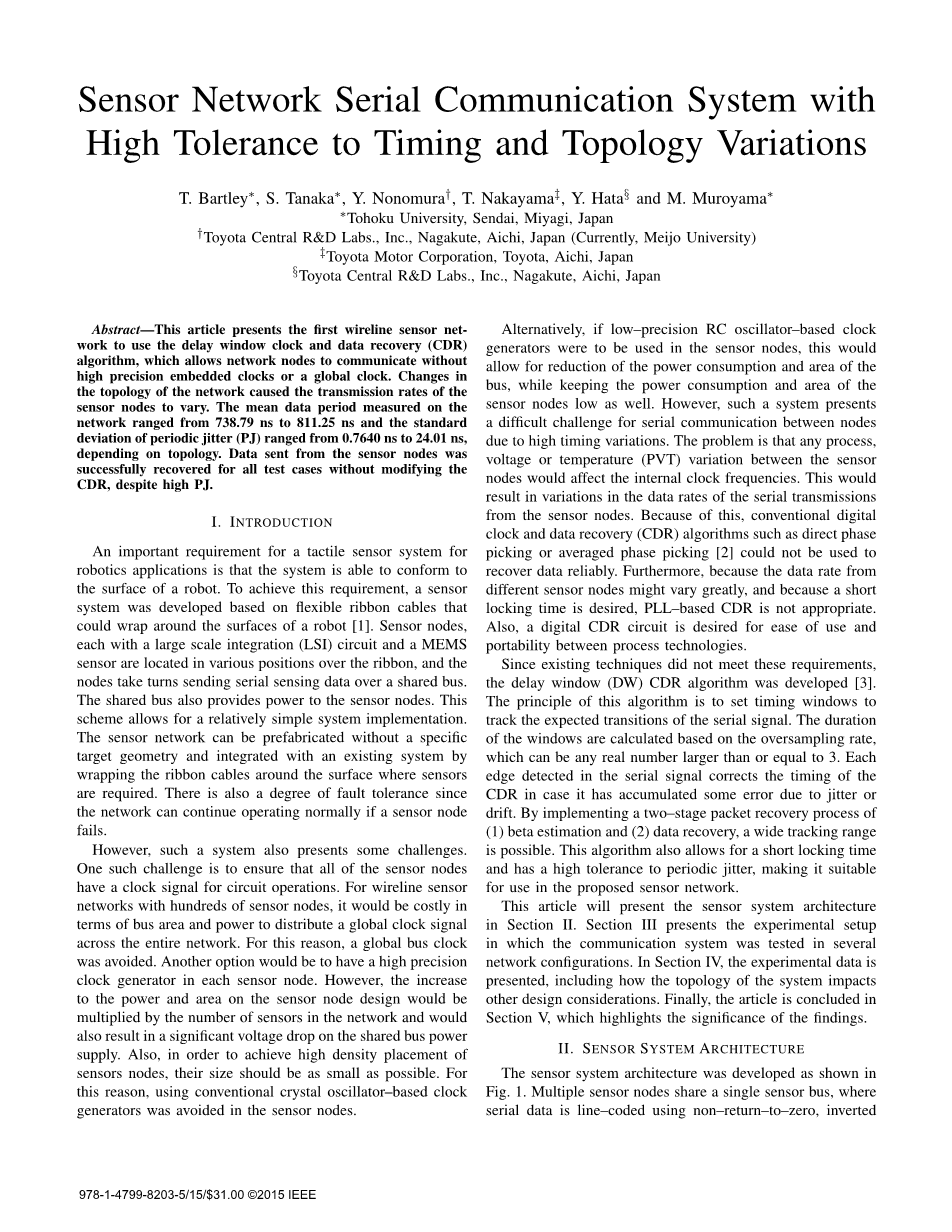
传感器系统架构的开发如图1所示。多个传感器节点共享一个传感器总线,其中串行数据使用非归零,反转(NRZI)进行行编码并发送到单个中继节点字段 可编程门阵列(FPGA)。 传感器总线向系统中的所有节点提供电源,接地和单个串行数据信号。 每个传感器节点的串行数据输入输出在空闲时都是高阻抗的,并且只有在传输数据时才驱动总线信号。 这允许传感器节点通过总线的并行或串行拓扑的任何组合连接到中继节点。
图1.传感器系统架构(顶部)和编码传感器数据包格式(底部)。 正在评估的DW CDR接收器位于中继节点的TX / RX模块中
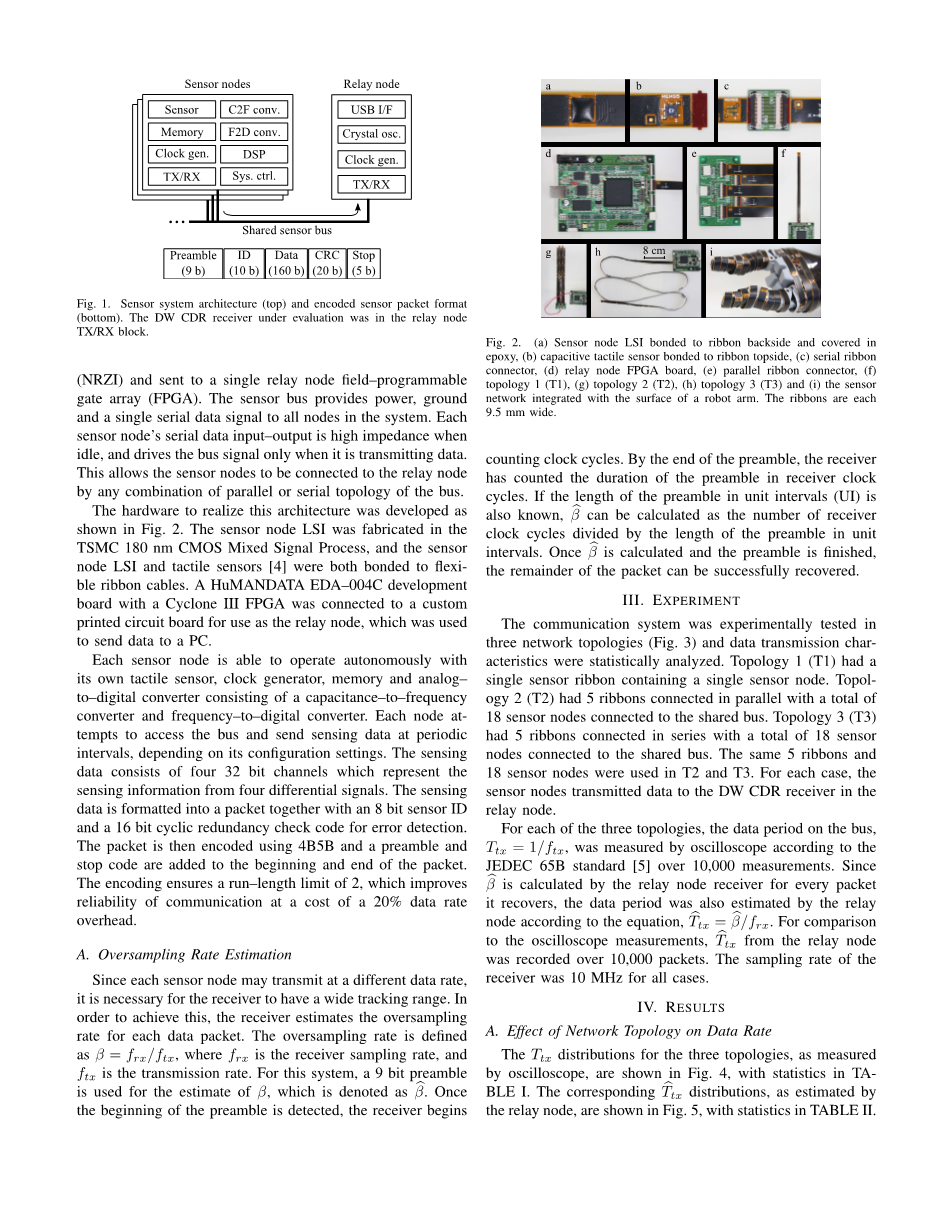
图2.(a)传感器节点LSI绑定到色带背面并覆盖环氧树脂,(b)电容触觉传感器绑定到色带顶端,(c)串行带状连接器,(d)中继节点FPGA板,(e)并行色带 (f)拓扑1(T1),(g)拓扑2(T2),(h)拓扑3(T3)和(i)与机器人臂表面集成的传感器网络。 色带每个9.5毫米宽
实现该架构的硬件如图2所示。传感器节点LSI采用TSMC 180 nm CMOS混合信号工艺制造,传感器节点LSI和触觉传感器[4]均采用柔性带电缆。 带有Cyclone III FPGA的HuMANDATA EDA-004C开发板连接到定制印刷电路板,用作中继节点,用于将数据发送到PC。
每个传感器节点都能够使用自己的触觉传感器,时钟发生器,存储器和由电容频率转换器和频率 - 数字转换器组成的模数转换器自主运行。 每个节点试图访问总线并根据其配置设置定期发送感应数据。 感测数据由四个32位通道组成,代表来自四个差分信号的感测信息。 感测数据与8位传感器ID和16位循环冗余校验码一起格式化为数据包以用于错误检测。 然后使用4B5B对分组进行编码,并将前导码和停止码添加到分组的开始和结束处。 该编码确保了游程长度限制为2,这以20%的数据速率开销为代价提高了通信的可靠性。
- 过采样率估计
由于每个传感器节点可以以不同的数据速率进行传输,因此接收机必须具有宽的跟踪范围。 为了实现这一点,接收器估计每个数据包的过采样率。 过采样率定义为beta;= fRX / fTX,其中fRX是接收器采样率,fTX是传输率。 对于这个系统,一个9位的前导码用于beta;的估计,其表示为beta;。 一旦检测到前导码的开始,接收器就开始计数时钟周期。 到前导码结束时,接收器已经在接收器时钟周期中计算了前导码的持续时间。 如果单位间隔(UI)中的前导码的长度是beta;也可以知道,beta;可以被计算为接收器的数量时钟周期除以单位中前导码的长度beta;间隔。 一旦beta;被计算出来并且前导码完成,分组的其余部分可以被成功恢复。
- 实验
通信系统在三个网络拓扑中进行了实验测试(图3),并对数据传输特性进行了统计分析。 拓扑1(T1)具有包含单个传感器节点的单个传感器色带。 拓扑结构2(T2)具有5个并行连接的带子,共有18个传感器节点连接到共享总线。 拓扑3(T3)有5个带串联连接共18个传感器节点连接到共享总线。 在T2和T3中使用相同的5个带和18个传感器节点。 对于每种情况,传感器节点都将数据传输到中继节点中的DW CDR接收器。
对于三种拓扑中的每一种,公交车上的数据周期,Ttx = 1 / ftx,通过示波器按照JEDEC 65B标准[5]超过10,000次测量。 以来由中继节点接收器针对每个分组计算beta;b它恢复,数据时间也由继电器估计根据等式,Tbtx =beta;/ f b rx。 为了比较到示波器测量,来自中继节点的Tbtx被记录了10,000个数据包。 的采样率接收机在所有情况下均为10 MHz。
- 结果
- 网络拓扑对数据速率的影响
测量的三种拓扑的Ttx分布通过示波器,在图4中显示,具有TABLE 1中的统计量。相应的Tbtx分布,中继节点,如图5所示,统计见表2。
图3.测试的三种拓扑结构的图,即6条带状的cach, RO-R5,是如何连接到中继节点的,还展示了在拓扑结构中的几个点的电源电压。
图4.用示波器()对三种拓扑中的TI-T3测量数据周期的直方图
表1
示波器数据周期测量(Tt)
从继电器nodeestimations的总体分布和统计数据与示波器的测量结果相似,有一个显著的区别。中继节点值是离散的,在可能的值之间有可见的gaps。这是由离散的p计算引起的。这个估计的分辨率可以通过增加E,或者增加序号的长度来增加。然而,由于它使总线带宽保持在低水平上,所以它是可取的。由于离散化误差小到不能导致CDR错误,所以可以实现9位的阿什波特。
可以看出,对于示波器和继电器节点的估计。这三种拓扑之间的标准偏差很大。对于T1,Ttx是相对恒定的,而T2的分布近似为高斯分布。连续带状拓扑T3最差的时间变化与最大标准偏差有24.01 ns。
图5.由rclay节点recciver估计的数据周期的直方图。
(Tta)为三种拓扑结构的cach, T1-T3。
表2统计数据来自中继节点数据周期估计
B.供电电压对数据速率的影响。
通过对传感器网络上的功率假定分布进行研究,可以找到三种拓扑结构之间不同的Ttx分布的原因。由于传感器时钟发生器基于RC振荡器,时钟频率对电源电压敏感。这三种拓扑结构的测量电压分布如图3所示。T3的电源电压变化最大,为44 mV,最大的peaktopeak Ttz变化为98 ns。这部分是因为缎带的串行连接具有最大的端到端阻力。而且,因为供给流必须通过一系列的丝带。这个结果是一个巨大的电压下降,随着网络上的传感器数量的增加而增加。对于T1,由于只有一个传感器节点,所以当前的消耗要低得多。对于T2,每个色带都有它自己的供应电流,而不是ashared电流,从而导致供应电压的波动降低到T3。
此外,在T3拓扑结构中,(图6)还对5个连接的丝带进行了分析。使用来自于therecovered数据包的ID信息来组织定时数据带。结果表明,从中继节点和电源中提取的传感器信息越远,其传输速率越慢。例如,最靠近电源(R1)的色带上的传感器节点具有smallestTtx,而远离电源的传感器节点(R5)具有。Tzx最大。这种现象是由电源电压下降来解释的。整个网络。在电力供应方面,Ribbonscloser比ribbons更远的地方的电压下降更少。
传感器节点传输数据速率之间的关系和电源电压是评估测试如果网络电源电压分布的原因datarate变化(图7)。单个传感器节点的电源电压被从1.02 V至4.9 V和0.1 V的数据率以增加。测量结果证实了数据率对供电电压的敏感性。在1.02 V时,数据速率为0.1220 Mbps。在设计的1.8 V工作电压下,数据率为1.344 Mbps,最高实测数据为4.717 Mbps,为4.6 V。该图还显示了中继节点估计的准确性,与示波器测量相比。
图6所示数据周期的直方图,由继电器节点接收器(b T tx)对T3中5个色带中的每一个进行估计
图7所示传感器节点数据率依赖于示波器测量的电源电压,并由中继节点接收器估计。由于传感器节点时钟是一个简单的RC振荡器,因此所产生的数据率取决于强烈的电源电压
在传感器网络上的电源电压会导致数据速率的变化,从而可以通过中继节点获得关于网络上传感器节点的信息。由于传感器节点的数据速率部分由其供电电压决定,因此这种关系也可以回溯。例如,如果电压/数据速率关系如图7所示,继电器节点可以估计传感器节点的供电电压。
五.结论
研制一种新型的柔性传感器系统。共享总线方案允许在各种拓扑中安排传感器网络。这允许根据应用程序的需要分配传感器。对于触觉传感器系统的应用,传感器带可以缠绕在一起,以适应需要触觉传感的表面。
考虑到功率和区域的优化,在传感器节点中不使用晶体振荡传感器,也避免了一个全局时钟。由于所产生的RC振荡型传感器节点时钟对PVT变化具有高度敏感性,因此具有较高的时变率。传感器节点时钟的抖动导致传感器节点传输数据的抖动。为此,在系统接收机中采用了两步过采样率估计和数据恢复的过程。
分析了传感器网络拓扑结构对供电电压和产生传感器节点数据率的影响。分析表明,拓扑结构严重影响传感器节点的数据速率。如果在整个网络中有一致的供电电压,数据速率也会更加一致。然而,时间变化并不一定是一个负面的特性,因为它可以显示关于传感器网络的有价值的信息。数据率可用于了解传感器节点的电源电压。
由于传感器系统是为电力和区域优化设计的,因此对网络通信提出了一个难题。为此,开发了DW BO-CDR算法。该算法利用延迟窗口跟踪串行数据位边界的原理,对该应用具有重要的特点。首先,它有一个快速锁定时间,允许一个短的序言9比特。第二,它是在数字逻辑中实现的,允许它在过程技术之间轻松地移植。最后,它具有较宽的跟踪范围和较高的抖动容忍度,使其能够在实际应用中成功地恢复数据。
一个协议
这项工作是在综合微系统卓越研发中心完成的,东北大学在“先进技术融合创新中心”的项目下,为促进科技进步提供了专项协调资金支持。东京大学的VLSI设计和教育中心(VDEC)也与Synopsys公司、Cadence设计系统、Inc.和导师图形公司合作。
摘要:
[1] M. Muroyama etal.,“
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[21909],资料为PDF文档或Word文档,PDF文档可免费转换为Word



