基于自动微动装置的嵌入式3D视觉系统外文翻译资料
2022-09-05 16:43:11
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
基于自动微动装置的嵌入式3D视觉系统
摘要
机器视觉在自动装配中起重要作用。然而,本视觉系统用在装配环境中各个组件具有在1至10微米的尺寸范围是不足够的,因为当前的系统不提供在整个工作区足够的分辨率,当他们被固定机器人控制,并且它们太笨重儿不能被带到足够接近的组件。小尺寸的3D视觉系统预计将提供两个决定性的优势:高精度和高灵活性。所提出的工作目标是制定方便地嵌入在微装配机器人三维视觉传感器。通过三维感测方法筛选的纸张,以鉴定对小型化的最佳候选进行启动,并且其导致的多焦点原理的选择(其简洁地避免字段问题例如在立体视觉中遇到的深度)。这里,深度是由判断锐度最大值在不同的高度获取的图像的堆叠测量的。然后,它提出了一个初步的系统配置,可提供一个1300x1000图像与横向分辨率小于5微米和垂直分辨率优于20毫米更好的观点微米场。最后,下面是嵌入式实时多聚焦传感器的发展未来步骤介绍,并提供最关键的权衡的讨论。
关键字:3D视觉,微组装,距离成像,自动化装配,从聚焦深度,微视野,嵌入式视觉,3D传感
1.绪论
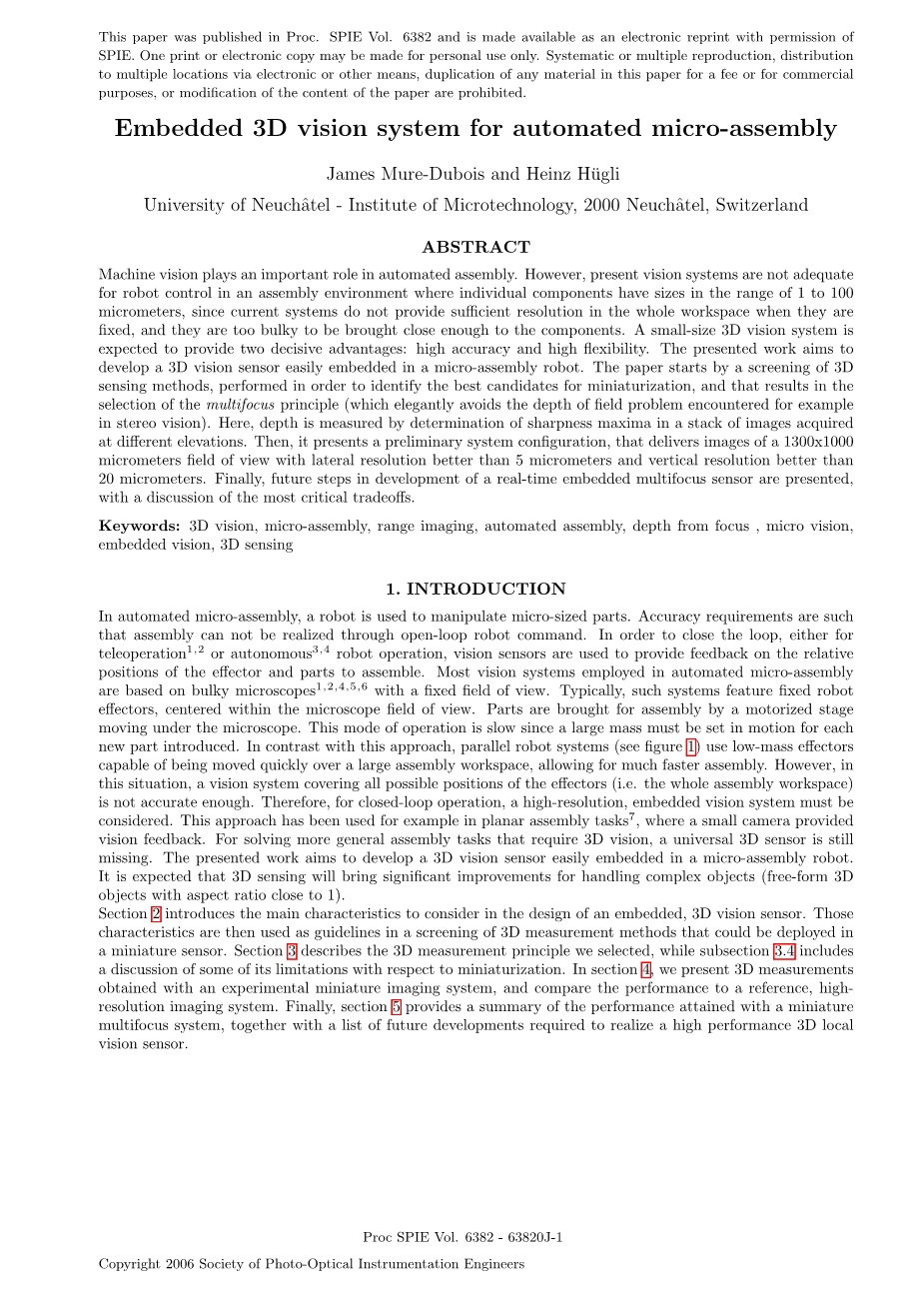
在自动化的微组件中,机器人用于操纵微尺寸的部件。精度要求是这样的,帽组件无法通过开环机器人命令来实现。为了关闭循环,无论是对遥控或者自主机器人动作,视觉传感器被用于提供有关的效应的相对位置和零件组装的反馈。在自动化的微组装中,大多数视觉系统采用的是基于笨重显微镜[1,2,4,5,6]与视图的固定字段。典型地,这种系统具有固定的机器人效应和视显微镜视场的中心。部分买来在机动阶段显微镜下移动进行组装。这种操作模式慢,因为一个大质量的物体必须设置在运动为每一个部分进行介绍与使用这种方法相反,平行机械手系统(见图1)使用低质量效应能够被迅速地移动在大的组件的工作空间,从而允许更快的装配。然而,在这种情况下,视觉系统覆盖的所有可能位置(鼻内整个组件工作区)是不够准确。因此,对于闭环操作,嵌入式视觉系统必须将高分辨率加以考虑。这种方法已被用于平面装配任务[7],其中一个小的摄像机提供视觉反馈。为了解决需要3D视觉更一般的总装任务,一个普遍的3D传感器仍然缺乏。所提出的工作目标是开发一个方便地嵌入微型装配机器人的三维视觉传感器。据预计,3D感测对用于处理复杂对象(自由形式的3D对象纵横比接近1)会带来显著的改进。
第2节介绍的主要特点是在一个嵌入式的3D视觉传感器的设计考虑。然后这些特征被用作的可能在一个微型传感器被部署三维测量方法的筛选准则。这些特点被用作在三维测量方法部署一个微型传感器的筛选准则。第3节我们选用了3D测量原理作介绍,而3、4节包括它的小型化限制的一些方面的讨论。在第4节中,我们通过实验提出用小型成像系统获得的三维测量,并比较所述性能的基准,高分辨率成像系统。最后,第5提供了一个微型的多焦点系统获得的性能的概要,和实现高性能3D局部视觉传感器的未来发展所需的列表。
2.嵌入式视觉系统的需求
2.1.质量
虽然传感器质量在计算机视觉应用中一般不作重要考虑,但是,它是嵌入式系统设计的关键意义。作为一个本地传感器的原理,体积图像仅是组件工作区的一小部分。这意味着嵌入的传感器将与机器人有源系统(夹纱器,致动器)在组装作业上移动。快速运动才可能传感器的质量变低。作为实际应用的指导原则,我们设置了约束:Mle;100克。我们将看到,这个限制是至关重要的,因为它禁止使用了高光学性能的仪器,如笨重的显微镜物镜。这反过来又限制了可以达到的水平和垂直分辨率。它也限制了成像设备的选择(像素尺寸必须很小,以提供具有小光放大率的高分辨率图像)。
2.2.分辨率 - 视场
为了达到装配公差,空间分辨率必须尽可能的高。此外,希望具有的视图有尽可能的大,以便包含所有出现在工作区到本地3D图像的相关部分。作为一个用于系统设计的目标,我们指定的视图要在1立方毫米和到1立方厘米的范围内改变体积。因为标准相机的像素很少超过,平面分辨率充其量限于成像体积的千分之一。根据目标组件的应用程序,必须在分辨率和空间间找到平衡点。
2.3.帧率
三维传感器必须在生产环境使用中提供实时数据。作为一个实际应用的目标值,我们指定该数据应在制备(允许实时遥控,和更有效的自主操作)。依赖于最终的应用,较低的帧速率可以被接受,特别是在高精度比高速操作更关键的应用上。
2.4.小结
上述要求的性质是非常不同。它可能会显示很难同时达到所有目标值。因此,我们需要设置不同要求之间的优先级规则。表1总结了一个本地3D传感器的期望,并公开如果预期值不能达到的主要处罚。当目标是嵌入式应用的时候,最高优先级应设置为顺应质量需求。按优先顺序接下来是空间分辨率。卷映像和帧速率共享优先的第三个层次。
2.5深度测量方法筛选
上述标准可以用作准则来选择用于嵌入的3D传感器的设计最适当的深度测量原理。我们将在这里列出3D视觉的四种方法,现在需要考虑的主要内容是开发出高分辨率的三维成像系统。这里的目标是是解释多焦点方法,实验的上诉方法将在下一节讨论。我们认为3D视觉的方法是:
bull;多焦点视觉
bull;白光干涉
bull;结构化光线的深度
bull;深度体视
在多焦点的方法8,9中,目的是通过一种相机场的短深度成像。摄像机相对于所述对象移动以执行深度扫描。深度是由施加到扫描图像的堆叠锐度最大化算法来确定的。
白光干涉10涉及两个相干光束。参考光束被反射在一个扫描镜,而探测光束被投射在物体上。两反射光束之间的干扰造成测量对象和参考反射镜之间的深度差。扫描镜的位移允许获得对整个对象的范围的地图。在从结构化光线11,12的深度,一个高清晰度的光图案被投射在对象上,而所述成像装置记录所产生的图像,这是对象拓扑的特征。软件算法被用于确定记录在每个点的强度结构编码的深度索引。然后深度是通过三角测量获得的。最后,从立体声13的深度,该目的是通过两个照相机在不同的位置成像。通过找到将两个图像之间的对应关系,深度可以通过三角测量来计算。
在表2中,上述四种方法,有两个要求机械深度扫描(多焦点,白光干涉),两个需要主动照明(白光干涉,结构化光线),和一个要求的对应匹配算法(立体视觉)。是这些方法的一些主要特征。
对于一个嵌入式3D传感器的实现中,排除结构化光线以及白光干涉深度由质量要求(有源照明设置的质量)。立体视觉是由分辨率/深度限制的。
实际的权衡:高分辨率成像所需的高光学倍率降低了深度,其中,对于立体声,限制了可以在图像对之间找到的深度。与立体声相比,多聚焦在高放大倍率时利用领域的深度有限。这种被动式技术在生产出高分辨率的3D图像时是最合适的。这种方法的一个更详细的描述在下面部分中给出。
3.多聚焦式3D显微镜
在本节中,我们回顾多焦点三维测量的基本原理,提出用于估计其性能的简单模型,最后,我们给出其小型化相关限制的简要概述理论。
3.1.深度测量原理
多焦点三维测量的原理在[15,10]中描述。与现场的一个短深度的显微镜,用于获取在不同的高度相对于物体(图2)的一系列图像。图像转变成相关的清晰度像的后,为对图像中的任意像素中的对象的深度是关联到堆栈之中最大清晰度的图像的深度。
其中 (1)
该领域的深度的程度,对可达到的深度分辨率提出了更高的限制。
3.2多聚焦系统的关键部件
基于上述多聚焦深度测量的原理,我们可以区分可见光三维成像系统的4个主要组成部分:
bull;光学元件:图像形成系统。
bull;电子元件:图像传感器。
bull;软件组件:控制相机的位移,清晰度最大化和深度的决心
算法。
本文旨在分析嵌入约束的影响(主要是质量)的光学和电子元件,因为这些硬件组件的最关键方面的三维成像性能—曼斯。延伸嵌入符合z-motor话题是留给未来的工作。最后,我们将列出一些观点的软件组件的实时约束的适应。
3.3简单的软件处理
在多聚焦软件处理的关键因素是锐度分析。通过将操作者所获取的强度的图像的高频率敏感执行锐度分析。在各种高频敏感的运营商,我们采用局部方差15和拉普拉斯过滤器。在堆栈中的每个图像I I(X,y)的一个锐度映射图S I(X,y)被计算
其中K是的矩阵 (2)
如等式2中所述高频能量测量的局限性是噪音灵敏度清晰度算子核的尺寸必须适合于所测量的场景(以探测正在场景中强烈表示空间频率)。即使当适当的清晰度操作者也是无法避免的由噪声引起假深度读数的存在。
3.4微型相机聚焦
我们已经看到(第2节)的质量要求是最关键的嵌入式三维视觉系统的发展。而CCD传感器的质量很小,需要在传感器上形成图像光学相当,如果是大的,它们的重量可以减到最低:
bull;图像的横向范围小
bull;放大倍率小
因此,嵌入式视觉系统必须使用一个小的传感器,以最小的像素间距。付出的代价是
对于传感器的高噪声敏感度。
3.5理论预期
在深度确定的精度将是最好的相同数量级的深度。深入现场被定义为最大位移深度为对象而不局限于图像模糊传感器的一个像素。使用一个简单的,单一的透镜模型,深入的领域自由度可以表示为(3):
(3)
式中:
bull;是光学系统的焦距
bull;是光学系统入射光瞳直径
bull;是成像传感器像素间距
bull;是所述传感器的横向延伸(像素)
bull;是图像场的横向延伸。
5.视角
正如上面提到的,嵌入式3D视觉传感器的设计还远远没有完成。许多挑战依然存在,如果在表1中定义的所有期望都得到满足。表4总结了发展的系统的性能,并列出一些观点在每个区改善..
表4.多对焦系统目前性能,改进的观点。
5.1低质量的多聚焦
我们已经看到了微型成像仪的多焦点可以在20微米量级达到的精度规格,20克的成像质量预算。在一个嵌入式多焦点传感器的发展以下步骤是一个适当的z电机,能够在5毫米或更大的冲程移动该20克成像质量的选择,而电机的质量保持在80克此步骤所需的一个第一埋入三维传感器原型的完成。除了质量,要考虑电机选择标准是:线性精度,冲程长度和运行速度。对于第一个嵌入式原型,质量和线性精度被认为是至关重要的,而行程和运行速度的长短是次要的。
5.2.高帧速率成像
为了满足表1的帧速率说明书中,需要额外的步骤。首先,在z电机必须移动至成像器变为10Hz的周期。第二步,(图像需要一个范围20的二维图像堆栈的假设下)图像传感器必须获得在200fps的速度图像。最后,该软件组件必须以相同的速率,即,在小于5毫秒计算锐度的图像。为了达到这个目标,锐度判定可以仅在图像的小区域来执行(使用感兴趣的200times;200区域允许通过一个因子高于10,以减少计算时间)。可替代地,带片上的处理智能成像器可用于加速锐度值的计算。
6.结论
本文为微组装机器人三维视觉系统的发展作出贡献。通过所提出的典型的要求分析表明,质量的限制是最关键的。大众考虑驱动的深度测定多聚焦方式的选择。在本文中开发过程中的第一步,使用微型图像传感器和光学成像系统,膨松的z马达的多焦点系统提出,实现了,为了评估的一个微型结果的性能表明,该深度精度与微型成像器系统(质谱lt;20克)接近到20mu;m,当与基于笨重显微镜经典系统相比,以大约10的因子表示性能下降。在基于多焦点的方式嵌入的3D传感器的设计所确定的下一个步骤是一个低质量的z电机的集成。最后,一个全功能的嵌入式3D传感器设实时处理。两种可能性被认为是此步骤:视场限制到感兴趣的200times;200区域,或片上由一个专用的成像处理清晰度计算。
参考文献
[1]. T. Sulzmann, J. Carlier and J. Jacot, “Distributed microscopy: towards a 3D computer graphic-based multi user microscopic manipulation, imaging and measurement system.,”in Sensor Fusion and Distributed Robotic Agents, P. Schenker and G. McKee, eds., Proc. SPIE 2905, pp. 183–191, 1996.
[2]. A. Ferreira, J.-G. Fontaine and S. Hirai, “Automation of a teleoperated microassembly desktop station supervised by virtual reality,”Transactions on Control, Automation, and Systems Engineering 4(1), pp. 2519–2535, 2002.
[3]. R. Hollis and J. Gowdy,“Miniature Factories for Precision Assembly,”in International Workshop on Micro Factories, pp. 9–14, 1998.
[4]. R. Kallio, Q. Zhou, J. Korpinen and H. Koivo,“Three Dimensional Positio
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147245],资料为PDF文档或Word文档,PDF文档可免费转换为Word



