四旋翼无人机系统设计外文翻译资料
2022-01-04 22:00:27
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
复杂系统的跨学科描述14 (2) 236-245,2016
四旋翼无人机系统设计
Denis Kotarski1,* Zoran beni ć2和 Matija Krznar3
1Karlovac 应用科学大学
1Karlovac,克罗地亚
2科纳查 D amp; ST
2萨格勒布,克罗地亚
3Peti Brod
2萨格勒布,克罗地亚
DOI: 10.7906/indecs.14.2.12
定期文章
收到:2016年2月7日。
接受:2016年3月9日。
摘要
在实验设置实施之前,高度和姿态控制的四轴模型用于行为和控制算法测试。主要目标是控制系统结合四轴飞行器动力学模型,可以实现良好的任务性能。此外,对于控制模型,重要的是相对容易修改以供其他人使用控制算法,并且易于在实验装置上实施。在本文开头,描述了控制系统设计过程。四轴飞行器动力学方程被简化通过应用几个假设并以该形式用于控制器合成。四轴飞行器控制系统分为内外控制回路,因为四轴飞行器欠驱动系统意味着不可能直接控制所有自由度。在里面第二部分,描述了应用于简化四轴飞行器PI-D控制算法动态模型。内环与四轴飞行器一起控制侧倾,俯仰和偏航角度高度。它的输出是四个控制变量。外环控制四轴飞行器X和Y位置。它的输出是滚动和俯仰所需的角度。显示了三个调节的四轴飞行器模型行为任务类型。首先,模拟了空间位置的实现。然后参考轨迹跟踪显示。显示的最后任务是添加了周期性的参考轨迹跟踪干扰。模拟显示使用PI-D控制器调节四轴飞行器系统的有界位置误差,用于在不同条件下执行的不同类型的任务。
关键词
四边形,控制设计,内环,外环,PI-D 控制器
分类
杰尔: Z19
PACS: 07.05.Tp,87.19.Iu
* 相应的作者,::Denis.kotarski@triviumsci.com;385 92 2415118; Komor 扎奇雷奇 30,HR-49 223 Sveti Križ 扎奇雷奇,克罗地亚
四旋翼无人机控制设计
介绍
为了使四轴飞行器能够执行任务,需要实现控制算法。控制系统设计的目标是稳定系统状态所需的参考状态,或根据某些法律改变该状态,无论内在或外部干扰。这是通过反馈实现的,这可以比较用所需的过程测量过程的值。之前的控制算法实现在实验装置上,必须结合动态模型进行测试[1]。四轴飞行器具有六个自由度(6个自由度)和四个控制变量,这意味着四轴飞行器是欠驱动的,动态不稳定的系统。唯一可移动的部分是推进器螺旋桨相对于固定推进器轴线旋转。四轴飞行器框架具有交叉( )配置,其中推进器。是固定在四轴飞行器主体(框架)上。 Quadcopter框架被假定为刚性结构。唯一可变的东西被认为是螺旋桨每分钟转数(RPM)影响四轴运动。
控制系统设计
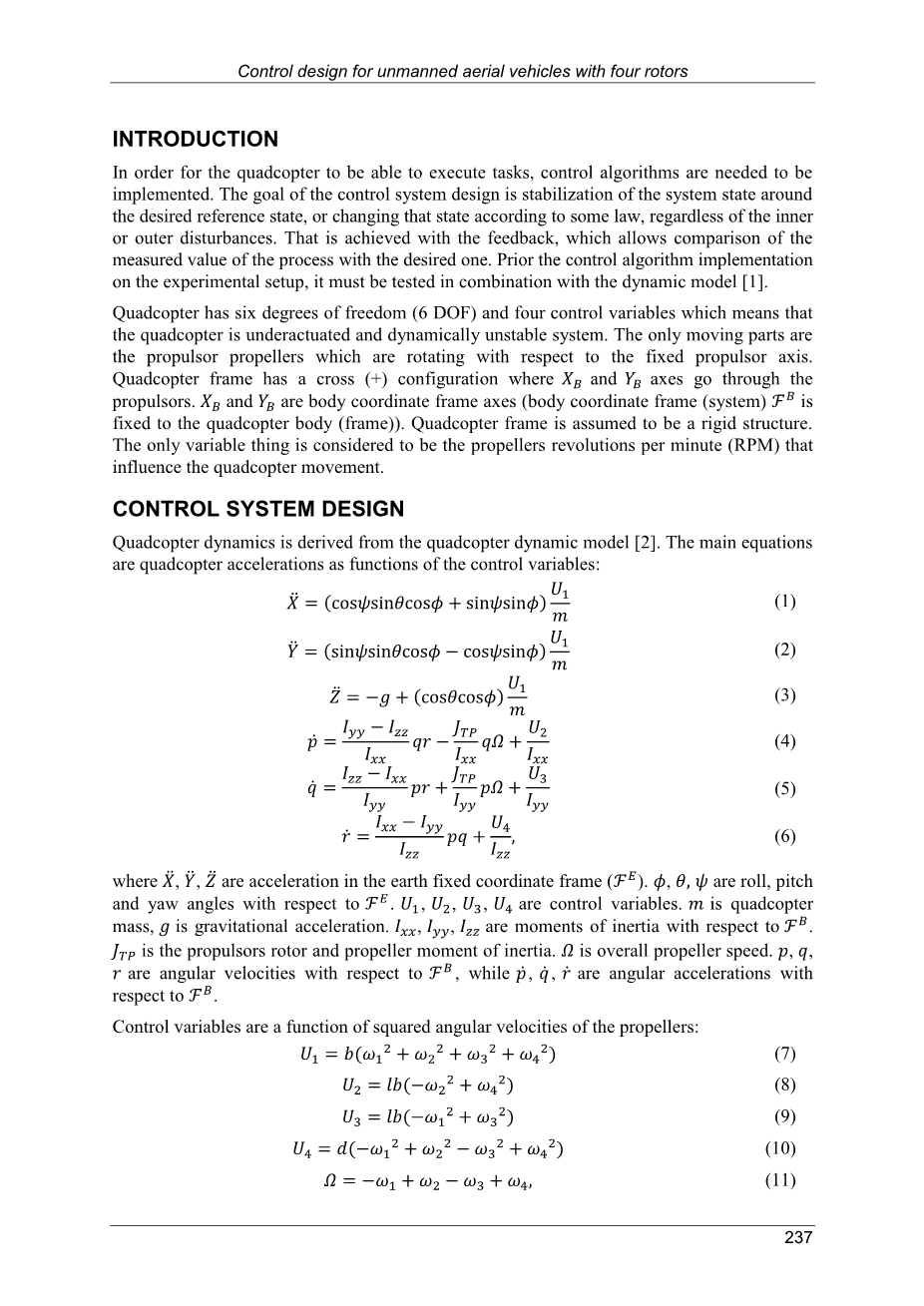
四轴飞行器动力学源于四轴飞行器动力学模型[2]。 主要方程式四轴加速度是控制变量的函数:
其中是地球固定坐标系中的加速度()。 phi;,theta;,psi;是滚动,俯仰并且相对于y的偏航角度,U1,U2,U3,U4是控制变量。m是飞行器的质量,g是重力加速度。Ixx,Iyy,Izz是相对于的惯性矩B。JTP是推进器转子和螺旋桨转动惯量。是整体螺旋桨速度。p、q、r是相对于angular()的角速度.
控制变量是螺旋桨角速度的平方函数:
其中L是quadcopters重心和推进器轴之间的距离,b是推力系数,d是阻力系数Wi是螺旋桨的角速度。四轴飞行器稳定的目的是找到螺旋桨的角度值以一种使四轴飞行器保持在所需位置和姿态的方式的速度。 这是通过逆运动学的平均值,即逆动力学。 与直接问题不同,逆操作并非总是可行,并不总是唯一的。 四轴飞行器动力学必须如此简化以获得简单的逆模型,可以很容易地在控制算法中实现。必须简化等式(1) - (6),并记住以下假设:
对加速度的角度贡献非常复杂,因为它们依赖于a
几个参数,其中大部分是角速度的矢量积。保持
请注意,四轴飞行器运动接近悬停状态,其变化非常小
角度,因此可以忽略这些贡献。
角加速度与角度相对于change的变化相关联
。他们不是
等于Eu中欧拉角的加速度
。变换矩阵
角速度与ℱ之间的关系
和ℱ
。四轴飞行器
运动接近悬停状态,
角加速度方程在ℱ中相同
和ℱ
。
控制算法将控制信号提供给推进器。有四个控制变量,
在单个循环中,不可能调节超过四个DOF。内循环控制
高度和姿态,而外环控制四轴飞行器的位置
态度引用内循环。
用于控制合成的四轴飞行器动力学方程是:
对加速度的角度贡献非常复杂,因为它们依赖于a几个参数,其中大部分是角速度的矢量积。保持请注意,四轴飞行器运动接近悬停状态,其变化非常小角度,因此可以忽略这些贡献。角加速度与角度相对于change的变化相关联。他们不是等于Eu中欧拉角的加速度。变换矩阵角速度与ℱ之间的关系和ℱ。四轴飞行器运动接近悬停态,角加速度方程在ℱ中相同和ℱ。控制算法将控制信号提供给推进器。有四个控制变量,在单个循环中,不可能调节超过四个DOF。内循环控制高度和姿态,而外环控制四轴飞行器的位置态度引用内循环。用于控制合成的四轴飞行器动力学方程是:
其中是相对于angular的角加速度。
作为输入的控制算法具有传感器数据(或来自动态模型的计算数据)和参考数据。控制算法的输出是四个螺旋桨的角速度,其中可以通过动态模型将其转换为脉冲宽度调制(PWM)信号。Quadcopter是一个欠驱动系统,不允许直接控制所有DOF。通过控制滚动和俯仰角来间接控制位置外控制回路。四轴飞行器不能在不绕一个旋转的情况下平移移动四轴飞行器轴。外部控制回路分析传感器数据和所需的任务数据及其输出是内部控制回路的所需角度值,然后控制滚动,俯仰和偏航角度。内控制回路是控制算法的核心。它分析传感器和外部控制循环数据与期望的高度任务数据一起。它的输出是控制通过四个基本四轴运动稳定位置误差的变量。从方程(7) - (10)可以检索控制变量以获得所需的加速度。 PI-d控制器用于所需的加速度评估。倒置运动矩阵用于计算平方角度螺旋桨四个控制变量的速度:
图1. Quadcopter控制图。
PID控制
经典PID结构具有根据误差信号计算的微分项,即a当涉及到四轴飞行器控制时,该结构的缺点。 如果任务采用表单对于阶梯函数,导数的输出将是一个可以带来的推动器推进到饱和状态并将系统推到线性空间之外。 那是导数的PI-D结构的原因(图2),其中导数项是根据传感器数据计算。
图二PID控制结构
内部控制循环
内部控制回路控制四轴飞行器的高度和姿态。 内循环的输入变量可分为两部分,任务和传感器变量,如图2所示。任务变量是由四轴飞行器所需的任务给出的所需高度和偏航角完成并获得在外部控制回路中计算的滚转角和俯仰角。传感器给出测量的高度,侧倾角,俯仰角和偏航角。 内环输出是四个控制变量。
高度控制
高度控制推力控制变量U1的公式为:
其中的Kpz,Kiz和Kdz是三个高度的PID控制参数。eZ是高度误差,其中eZ=Zdes-Zmes。Zde是所需高度,Zmes是测量高度。
滚动控制
侧倾力矩控制变量U2的公式为:
其中,和是测倾角的三个PID控制参数。是滚动角误差,其中=误差,其中所需倾斜角,是测的倾斜角。
俯仰角控制
俯仰角控制变量U3的公式为:
类似与滚转角的控制,其中,和是测倾角的三个PID控制参数。是滚动角误差,其中=误差,其中设计的俯仰角,是测的俯仰角。
偏航角控制角控制
偏航角控制变量U4的公式为:
其中,和是测倾角的三个PID控制参数。是滚动角误差,其中=误差,其中设计的偏航角,是测的偏航角。
外控制环
使用外部控制回路是因为四轴飞行器是欠驱动系统而不是可以直接控制所有四轴飞行器DOF。 如前所述,内环直接控制4个自由度,即三个角度和高度。 能够间接控制
外部控制回路作为其输出,提供所需的滚动和俯仰对于所需的外控制回路优于内部控制循环。可以挑选出等式(1)和(2),它们是四轴飞行器线性加速度:
在类似的情况下,可以简化XE和YE作为四轴飞行器动力学方程(12) - (15)的方式。 再次,四轴飞行器运动是观察到悬停状态,即滚动和俯仰角非常小(接近0)。 保持考虑到这一点,方程(24)和(25)可以转换为:
方程(26)和(27)的矩阵表示法
根据等式(28),计算滚动角和俯仰角。 因为这个假设四轴飞行器运动接近悬停状态时,推力U1必须使其无效。允许U1 / m的重力随重力加速度changed而变化。所需的滚动角和俯仰角的公式为:
仿真结果
受控四轴飞行器系统的行为取决于动力学模型。四轴飞行器和控制算法。 控制算法输
入值是定义的值在任务以及动态模型输出中。 控制算法输出是四个控制变量也是动态模型输入。
图3:受控制的四轴飞行器系统
给出了三种情况的仿真结果。 第一种情况是实现的模拟理想的位置。 第二种情况是参考轨迹跟踪,最后一种情况是参考轨迹跟踪增加周期性干扰。
实现理想的位置
在空间中的期望点,由三个坐标相对于定义为控制算法针对最快的期望点成就进行调整。 模拟时间为20秒。
图4.角度螺旋桨速度 - 在空间中实现所需位置。
图5显示了四轴飞行器的姿态,它不断变化,直到四轴飞行器到达所需的位置。 在达到该目的之后,滚动角和俯仰角为0.任意选择偏航角。
图5.四轴飞行器的姿态 - 在空间中实现理想的位置。
图6显示,经过一定的时间(cca.10秒)后,根据控制器参数,四轴飞行器到达所需位置(=15,=6,=10)并保持该状态。
图6.四轴飞行器位置 - 在空间中实现所需位置
参考轨迹跟踪
由于简单的生成和显示,选择的轨迹是螺旋形状。 Helix是三个功能的组合,其中两个是正弦形状(XE和YE位置),一个是线性(ZE位置)。模拟时间设置为100秒。
图7.螺旋桨角速度 - 参考轨迹跟踪。
图7显示了螺旋桨角速度,它取决于参考轨迹。
图8.四轴飞行器姿态 - 参考轨迹跟踪。
图9显示四轴飞行器快速接近参考轨迹并且正在以有界跟踪误差跟踪它,由于可
变参考状态而无法实现渐近误差收敛。
图9.参考轨迹跟踪的3D视图
参考轨迹跟踪增加的周期性
扰动在轨迹跟踪的情况下,在XY平面中添加周期性外力扰动。 X坐标干扰曲线的幅度为2 N,周期为10秒,持续时间为0.5秒,相位延迟为8秒。 Y坐标干扰曲线的振幅为1.5 N,周期为15秒,持续时间为1秒,相位延迟为6秒。
图10.螺旋桨角速度 - 增加周期性干扰的参考轨迹跟踪。
图11示出了角速度的变化,其取决于参考轨迹和给定的周期性扰动
图11.四轴飞行器姿态 - 参考轨迹跟踪增加了周期性干扰
图12示出了跟随有界位置误差的参考轨迹的四轴飞行器。 干扰正在影响四轴飞行器的位置和姿态,但是在可接受的边界内,不允许四轴飞行器失去对参考轨迹的跟踪。
图12.添加了周期性干扰的参考轨迹跟踪的3D视图。
结论
本文展示了控制设计和控制算法的实现,它与四轴飞行器动态模型相结合,构成
了调节四轴飞行器系统。在控制设计阶段,为了得到简化的四轴飞行器动力学方程,
做了一些假设。在不同条件下执行不同任务时的四轴飞行器行为通过模拟,其中一些
控制变量约束是为了更准确地描述四轴飞行器行为的目标。 根据经验选择的控制器参
数。外部控制回路输出是内部控制回路输入,因此选择外部回路参数的方式是与内部
回路参数组合提供最合适的控制变量。 仿真结果表明了稳定性,鲁棒性和误差PI-D
控制器的有界性。进一步的工作将包括实验装置上的控制算法实现。 此外,将测试更
先进的控制算法,目标是提高四轴飞行器系统的稳健性和跟踪性能以及更好的能源管
理。
参考文献
-
Bresciano, T.: M
全文共6410字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[2277]



