无人机抗干扰姿态控制策略研究毕业论文
2021-11-30 23:21:04
论文总字数:24169字
摘 要
四翼无人机是一种结构不复杂、体型小、重量轻、控制较为简单的有着直上直下飞行和在空中悬浮等特殊飞行能力的多翼飞行器,因此四翼无人机在很多方面都有这应用,例如军队中可以实现外敌入侵时的监测与通信,在一些商业活动上可以进行地质勘探、航拍等,旅游业上可以进行风景航拍,这也可以给旅游公司带来一些额外的收入,在研究中可以进行一些测试,比如测试其飞行姿态抗干扰能力或者其他方面的性能,除此之外,多翼无人机还能在救援领域、农业领域、服务领域起到一定的作用。这时候就涉及到了无人机飞行时的控制方法,而目前来说很多相关研究人员常常使用比较简单且热门的传统PID控制、模糊控制等控制方法进行对无人机的飞行姿态抗干扰设计的研究,除此之外,反步控制和滑膜控制的使用频率也不低。
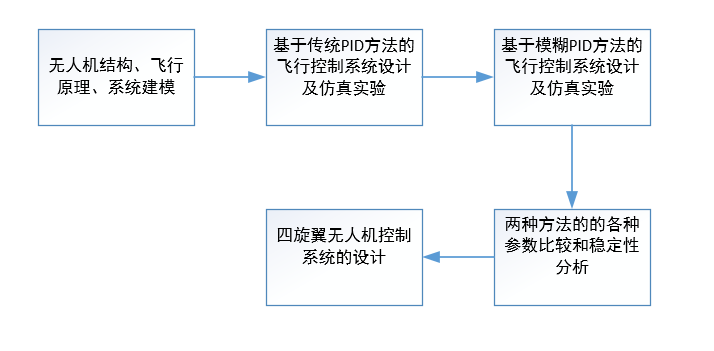
四翼无人机的研究并没有因为它本身的体型和造价以及简单的结构而搁浅,这些因素反而成为了它的优点,但是广泛使用的前提是它本身抗外界干扰能力强。对此本篇文章将对四翼无人机进行动力学模型以及数学模型进行建立,通过使用常用的传统PID控制以及模糊改进PID控制的方法来对四翼无人机的飞行姿态抗干扰能力进行研究,根据设计的两种方案进行模拟仿真实验,对比得出两种控制方法的优缺点,最后进行实物的验证,根据模拟仿真以及实物验证得出的结果进行比较,最后比较传统PID控制方法和基于模糊改进的PID控制方法从而得出最后的仿真方案。
关键词:四翼无人机、传统PID控制、模糊控制。
Abstract
The four wing UAV is a kind of multi wing UAV which is not complicated in structure, small in size, light in weight and simple in control, and has special flight capabilities such as flying up and down and suspending in the air. So,the four wing UAV is applicated in many aspects, such as military monitoring and communication, geological exploration and aerial photography in some commercial activities In the tourism industry, scenic aerial photography can be carried out, which can also bring some additional income to tourism companies. In the research, some tests can be carried out, such as the test of its anti-interference ability of flight attitude or other aspects. In addition, the multi wing UAV can play a certain role in the field of rescue, agriculture and service. At this time, the control method of UAV flying is involved. At present, many researchers often use simple and popular traditional PID control, fuzzy control and other control methods to study the anti-interference design of UAV's flight attitude. In addition, the use frequency of backstep control and sliding film control is not low.
The research on four-wing UAV is not grounded because of its size, cost and simple structure, which become its advantages instead. However, its strong resistance to external interference is the prerequisite for its wide use.Which this article will on 4 wing uav dynamic model and mathematical model are established, through the use of the commonly used the method to improve the traditional PID control and fuzzy PID control to four wing unmanned aerial vehicle (uav) flight attitude to study the anti-jamming capability, according to the design scheme of two kinds of simulation experiments, comparing the advantages and disadvantages of the two control methods, physical verification of the last, according to the simulation and actual product to verify the results are compared, and finally compare traditional PID control method and PID control method based on fuzzy improvement to reach this simulation scheme.
Key Words: four-wing UAV, traditional PID control, fuzzy control.
目录
第一章 绪论 1
1.1课题背景及研究目的及意义 1
1.2国内外研究现状 1
1.2.1四翼无人机的发展历史 1
1.22四翼无人机国内外研究现状 3
1.23多翼无人机未来发展趋势 4
1.3研究内容及目标 4
第二章 四翼无人机的飞行原理及其建模 5
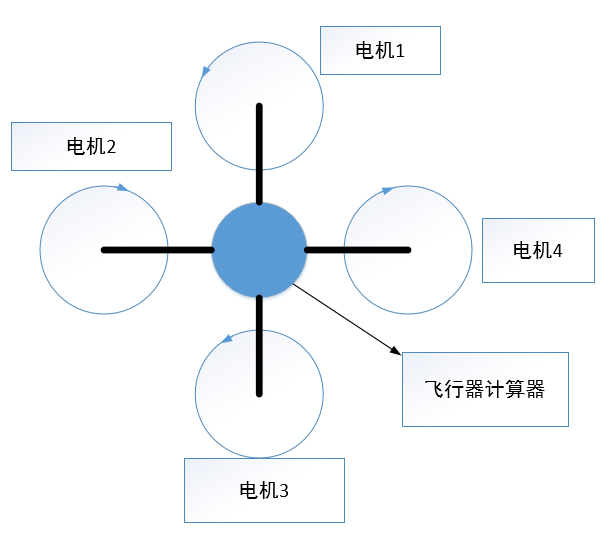
2.1四翼无人机的机身结构 5
2.2四翼无人机的飞行原理 6
2.3四翼无人机的控制方法 9
2.4四翼无人机系统建模 10
2.4.1四翼无人机的坐标系以及姿态描述 10
2.4.2无人机运动数学模型的建立 11
2.4.2四翼无人机运动数学模型的建立 12
2.4.3无人机受其它力的作用 13
第三章 基于PID方法的飞行控制系统设计 16
3.1 PID控制的结构与原理 16
3.2四翼无人机控制器总体设计方案 16
第四章 基于模糊控制改进的PID方法的飞行控制系统 24
4.1改进算法的基本原理 24
4.2模糊算法的设计 24·
4.3模糊PID控制器设计及仿真结果 29
第五章 实物验证 34
参考文献 40
致谢 41
第一章 绪论
1.1课题背景及研究目的及意义
四翼无人机最大的优点就是它本身结构的简单性以及体型的轻巧,这使得四翼无人机在很多地方都可以发挥很大的作用,而且成本更低,在一定程度上也更加可靠,因此与传统人工作业相比,四翼无人机在很多方面都能表现出很大的收益,同时还能保证相关工作人员免受生命财产安全的威胁,这就是最大限度的利用工具创造更多的价值。举一个例子说明,假如森林中发生了火灾,或者是灾后例如地震、泥石流、暴雨天气等的搜索,这时候的环境可以多种多样,例如高温、强辐射、空间多样性(树木倒塌导致周围空间环境的变化)、有毒等环境。在这些环境中四翼无人机完全可以代替人完成任务,甚至在一定程度上相比人工搜索而言完成的效率还要高。相比于通过人类劳动力去搜索而言,人们的搜索救援将会是一个很大的工程,并且很有可能会花费很大的人力以及物力财力,时间也会很长,这很可能会导致错过最佳救助时间,如果使用四旋翼无人机,利用其空中侦查检测能力,对发生灾害的地方进行定点搜索,在逐步缩小救援人员的搜索范围,这样就可以很好地探寻到所需救援的目标,因此利用四翼无人机辅助搜索可以极大地提高救援效率,还能大大降低救援成本。但是使用四旋翼无人机进行这些活动之前,我们需要研究四翼无人机的飞行姿态抗干扰的能力,尽量的提高抗干扰能力才能更好地完成任务。因此,四旋翼飞行器的飞行姿态抗干扰方面研究迫不及待。
1.2国内外研究现状
1.2.1四翼无人机的发展历史
四翼无人机发展历史已经超过一个世纪,在20世纪初,法国Breguet兄弟在C.Richet教授的指导下制造出了世界上第一台多旋翼飞行器,这是有文字和图片记录的最早的多旋翼飞行器,随后对他制造的多翼飞行器进行了测试飞行,但是很可惜,这台最早的飞行器最后只飞行了1.5米就坠落在了地上。见下图。

图 1-1 第一台多翼飞行器
法国工程师Étienne Oehmichen在20世纪20年代开始设计多旋翼飞行器,但是命运总是捉弄人,他的四旋翼飞行器首次试飞失败了,但是后来经过重新设计改进,这台多翼飞行器仿佛活了过来一般,但最后还是只飞行了十几分钟坠落在地,但也立下了当时直升机领域飞行时长最长的世界纪录。见图1-2。
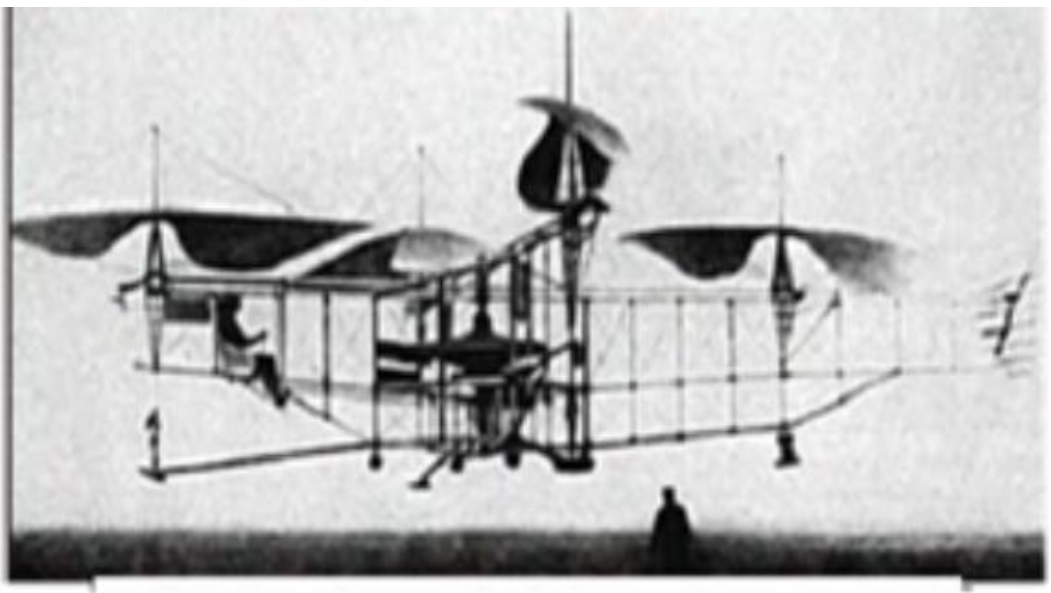
图 1-2法国工程师Étienne Oehmichen设计的飞行器
20世纪20,这是一架可载人的由俄裔美国人George de Bothezat在美国俄亥俄州西南部的空军基地设计建造的一架大型四旋翼飞行器,由于其体型较大因此这架飞机除了飞行员外还能再搭载3名乘客。见图1-3。
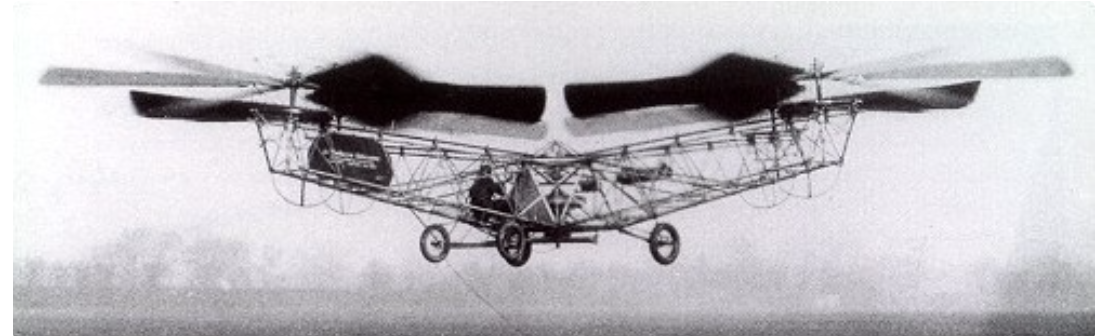
图 1-3 俄裔美国人George de Bothezat设计的飞行器
这架可载人的四翼无人机成功实现首飞,还通过了一些飞行测试,但是局限于当时的发动机行业的发展水平可能不高,这架四翼无人机的发动机性能太差,不足以支持其本身重量以及载人重力的合价,因此原本设计飞行高度为100m的飞行器因为发动机性能不足只飞到了5m高。
到了1950年代,美国的军队开始测试一些新的飞行能力,设计了一种使用燃气的新型飞行器,这个飞行器当时被称为“飞行吉普”,但是可惜的是这台飞行器也可能是因为发动机性能不足或者是其他原因使得这台飞行器的飞行高度和速度不足以达到要求,因此这台飞行器也被放弃了。见图1-4

图1-4 飞行吉普
到后来,四翼无人机的发展仿佛到达了瓶颈阶段,科学家们始终无法挣脱这个瓶颈,因此四翼无人机的发展并没有长足的进步,而飞行姿态稳定性的问题似乎也没有得到很好的解决。再后来随着整体科学技术水平的提高,有很多方面可以使用较好的材料或者说出现了新的控制器和传感器,可以大大提高无人机飞行时的抗干扰能力,从这时候起,四翼无人机又重新变得火热起来。
1.22四翼无人机国内外研究现状
在国产无人机大出风头的同时,反观国外,它们的无人机起步较早,因此值得我们更多的关注和研究。
法国:在无人机行业较为著名的公司Pattot公司的总部就在法国巴黎,他们主要设计一些高科技应用,当然这些应用是与电脑和手机有关的,除了设计应用,他们在汽车领域也有一定的话语权,因此他们常常可以提供一些关于汽车以及无人机的解决方案。
请支付后下载全文,论文总字数:24169字
相关图片展示: