新型智能垃圾桶的研究与设计外文翻译资料
2022-08-02 10:22:58
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
新型智能垃圾桶的研究与设计
LI Yongmei , ZHOU Lei , ZHANG Weifen
关键词:轮式机器人;垃圾桶;语音控制;避障
摘要:随着集成电子概念的广泛传播,智能化已经成为成为未来家居生活的趋势,因而垃圾桶作为一种常见的家具,也需要智能化。本次设计的垃圾桶以轮式机器人为基础,以保证其可以向前或向后移动,也可通过语音命令向左或向右旋转。超声波传感器被安装在垃圾桶机器人上,以保证其可以有效的避开移动中的障碍物。由转向电机控制的垃圾箱盖也可以通过语音控制顺利打开或关闭。这个智能垃圾桶非常适合那些行动困难的人,同时其作为一个作为家庭服务机器人,也有很大的发展空间。
简介
目前,市场上销售的智能垃圾箱普遍存在智能化程度低、功能有限的特点。他们基本上是用光电传感器或红外传感器来检测人体信号,然后通过微控制器单元驱动直流电机打开盖子,并在5、6秒后关闭。其主要缺点有两个:一是功能单一,智能化程度低;二是部分产品机械设计不合理。例如,大量产品是由直流电机通过铰链驱动的,但电机轴与铰链的连接或固定不合理,导致其使用寿命降低。针对现有智能垃圾桶产品的缺陷,增加基于轮式机器人的语音控制和避障功能,实际上可以提高垃圾桶的智能化水平和人机交互[1][2]。
整个系统的结构
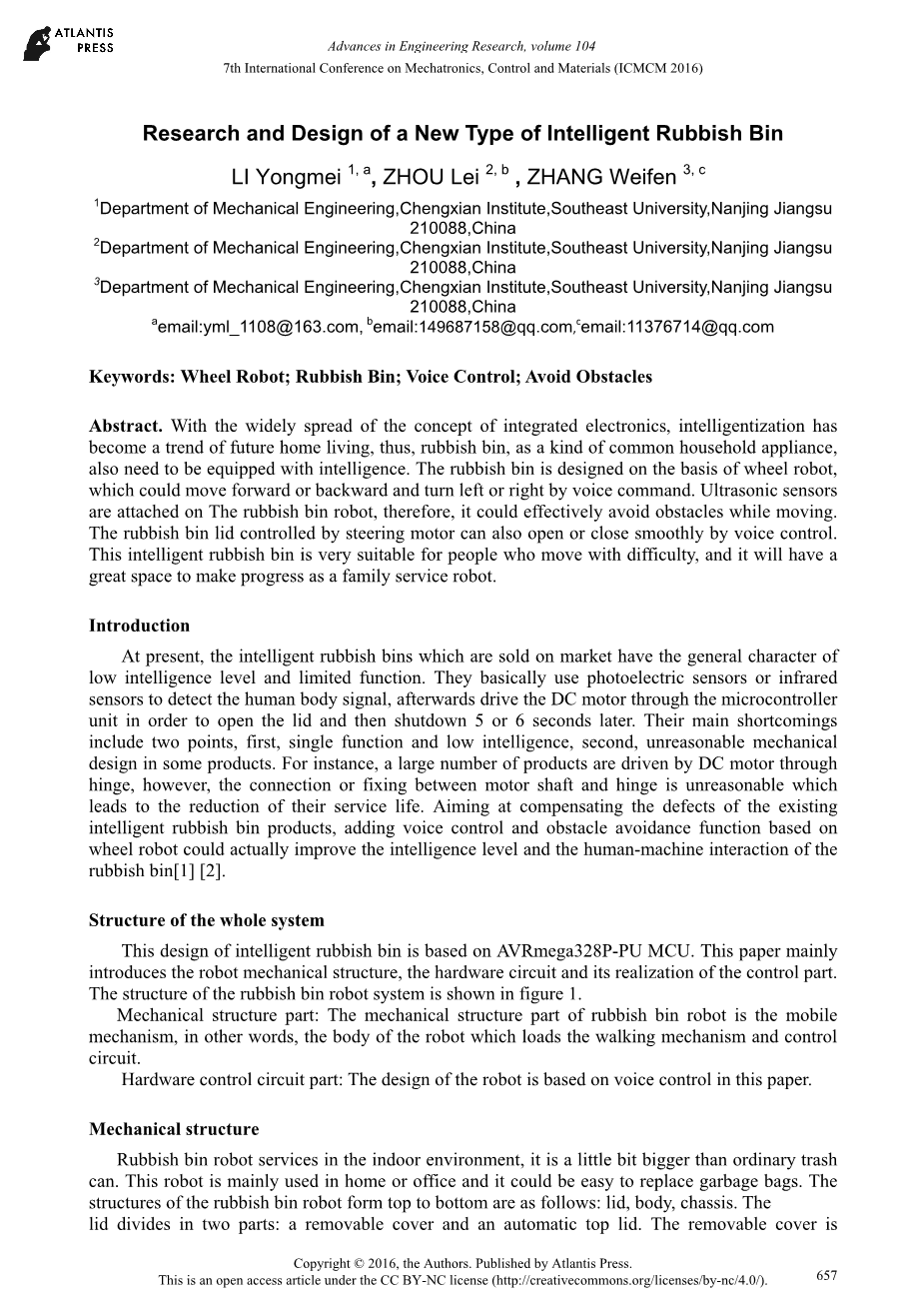
本设计基于AVRmega328P PU单片机的智能垃圾桶。本文主要是介绍了机器人的机械结构、硬件电路及其控制部分的实现。垃圾桶机器人系统的结构如图1所示。
机械结构部分:垃圾桶机器人的机械结构部分是移动机构,即装载行走机构和控制电路的机器人本体。
硬件控制电路部分:本文设计的机器人是基于语音控制的。
机械结构
垃圾桶机器人服务于室内环境,它比普通的垃圾桶大一点。该机器人主要用于家庭或办公室,可以方便地更换垃圾袋。垃圾桶机器人的结构由上到下依次为:盖、体、底盘。盖子分为两部分:可拆卸的盖子和自动顶盖。可拆卸的盖子设计用于更快地更换和组装垃圾袋。顶盖的尺寸比仓盖小,并嵌在仓盖上。[3] 盖与盖通过专用支撑机构连接,盖与本体通过铰链连接。为了便于组装和布线,桶体分为两层,外层为仓壳,内层为垃圾提供存放空间。垃圾桶机器人采用轮式结构,可前后行走,左右灵活转动。动力和控制部件安装在底盘上,驱动轮和辅助万向轮也安装在底盘上,这样不仅降低了重心,提高了运动时的稳定性,而且使电子元件能够统一安装,避免了元件之间分离太远的情况[4]。机器人实体如图2所示。
图1,原理框图 图2,实物图
1、 电源配置
垃圾桶机器人有两个电机,一个起主电机的作用,控制机器人的行走,另一个控制盖子的打开或关闭。由于在选择主电机时应考虑垃圾箱的重量,因此必须确保电机具有足够的牵引力。开盖电机的选择也存在同样的问题,用延时程序控制直流电机开盖是不明智的,因为直流电机没有足够的转矩,容易使电流过载甚至烧坏驱动板。综上所述,本次设计选用12V大功率直流电机驱动底盘车轮,转向电机在专用设计支架的辅助下控制桶盖的开闭。直流电动机将直流电能转化为机械能,具有较大的起动转矩和良好的调速性能。
2、 底盘车轮的结构设计
底部有两个反向分布的驱动轮和三个用于调整机器人转向的万向轮[5]。两个轮子由两个独立的马达驱动,但通用轮子不提供动力。马达、轮子、通用轮子和控制器、电路板都安装在底盘上,如图3所示。
图3,车轮的三维结构
1.万向轮2.驱动轮3.电机
3、 整体机械结构设计
除车轮外,底盘前端还配备了超声波传感器以避免障碍物。电路板和容器在机箱的上方,机器人的顶部是语音输出模块和盖子。为方便更换垃圾袋,盖子分为两层,一层为手动打开更换垃圾袋,另一层为顶部电池充电,另一层在使用时由电机自动打开。
底盘
材质:亚克力板,外圈直径290mm,厚度2mm,如图4所示。
图4,底盘设计 图5.简体结构示意图
2) 筒体
主体分为内筒和外筒两部分。在外筒顶部前方有一个可视空间,可以设置超声波测距传感器,结构如图5所示。材料:工程塑料;高度:400mm;外圈直径:300mm;垃圾存放区直径266mm;深度:280mm;材料厚度:2mm。
3) 盖子
桶盖有两部分:顶盖和盖子。盖子通过铰链与外筒体连接。此外,顶盖由转向电机在自行设计的支架辅助下控制。盖部件如图6所示。
a b c
d e f
图6,盖子组件
a. 盖 b.铰链 c.铰链示意图
d.转向马达支架 e.顶盖 f.顶盖
4) 探测结构
在外筒体的底部有一个凹槽,为超声波距离传感器提供了一个可见的探测空间。垃圾桶机器人通过超声波距离传感器判断前方是否有障碍物,以确定是否可以直行或转弯避开障碍物。桶上的可见窗口如图7所示。
图7,超声波检测的可见窗口
控制系统硬件设计
控制的三个要求:
1)可以实现人机交互,例如,人通过声音发出指令,机器人提供相应的动作(向前或向后行走、转身等),而不是通过遥控手动操作;
2)具有避障功能。垃圾桶机器人由于其复杂的环境和实际应用中不可避免的障碍,必须具备有效躲避障碍物的能力。
3)系统激活后,用户只需发出语音命令,其他操作由系统自动执行。
基于以上要求,控制电路硬件包括Arduino uno r3CPU控制模块、语音识别模块、语音合成模块、433无线模块、超声波检测模块、I/O扩展模块、L298N电机驱动模块、减压模块和电源扩展模块。每个模块都是独立设计的,都有标准接口,可以自由组合,便于开发各种设计方案。硬件的设计目标是电源驱动电机和转向电机,并为超声波测距传感器、主控制器和语音命令模块提供能量。主控制器必须对垃圾箱进行准确有效的控制。传感器能够识别机器人前方的障碍物,并为系统避障提供中断信号。此外,机器人还需要一些语音控制模块,如美国语音接收模块和语音处理模块,这些模块能够将人类的语音指令转换成控制器能够识别的信号。
1、 单片机控制模块
本文的电路硬件选用Atmel公司生产的AVR-mega328P-PU单片机,其参数如下:ATMEGA32x处理器系列;AVR8核;8位宽数据总线;32kB flash ROM等,Arduino控制器主要由mega328P PU MCU构成,是一种集成电路板,具有JAVA或C等高级语言的IDE集成开发环境,基于USB接口的开源代码和简单的I/O接口板。
2、 语音和无线模块
在使用语音识别模块之前,必须在主机软件上进行设置。在上位机上以语音符号的形式输入中文指令,可根据指令的顺序得到十六进制值。例如,可以用{a0qian jin}的形式输入“goward”,另外,第一个订单的返回值是“00”。考虑到模块存储空间的限制,本文总共使用了约50条语音指令[6]。
语音合成模块的原理与语音识别模块相同,并在上位机上设置。该综合模块具有函数发生器,通过输入汉语语音提示来实现编码。例如,机器人说“智能机器人为您服务,请下单”,当它打开时,提示的代码可以放入程序或直接调用。
超声波检测模块
根据超声波的特点,研制了超声波距离传感器。超声波本身是一种频率高于声波振动的机械波。能量转换芯片能在电压激励下产生超声波。超声波在液体和固体中具有很强的穿透性,特别是在不透明固体中,它能穿透几十米深。当超声波遇到杂质或界面时,会产生明显的反射波,而且当它面对运动物体时,会产生多普勒效应。超声波具有频率高、波长短、衍射现象小的特点,而且具有良好的指向性,可以以射线的形式定向传播。因此,超声波在工业、国防、生物医学等领域有着广泛的应用。通常,人们喜欢使用超声波传感器或超声波探
软件设计与实验结果
根据整个智能机器人的运动控制要求,由电源提供能量,电机驱动轮子,使盖子打开或关闭。在接收语音指令时,控制器控制所有的动作。本文根据程序流程分别编写了主程序和子程序,包括正、反、左、右、停、开、关程序。通过测试和优化,垃圾桶机器人在语音命令下在室内表现良好。控制系统的流程图如图8所示。
图8,控制系统流程图
结论
本文设计了一种语音控制的智能垃圾桶机器人。这个垃圾箱需要实现前进或后退、左转或右转、打开或关闭盖子的动作,只有人类的声音指令。在可控范围内,当主人下命令时,垃圾桶机器人可以执行相应的动作。所以,这是一个机械、电子和自动化相结合的设计。
参考文献
[1]WU Guobin, LI Bin , YAN Jizhou. Kinect Human Computer Interaction Development Practice, [M], Peoples Posts and Telecommunications Press,2013.
[2] Alan Winfield , Robotics: A Very Short Introduction, [M], Oxford University Press,2012.
[3]Joe Jones, Daniel Roth. Robot Programming :A Practical Guide To Behavior-based
Robotics, [M],.McGraw-Hill Professional,2013.
[4]Massimo Banzi .Getting Started With Arduino , [M], Orsquo;Reilly media ,Inc ,USA ,2011.
[5]David Cook .Intermediate Robot Building, [M],APress ,2010.
[6]CHEN Xuedong, JIA Wenchuan. Motion Planning and Control. [M], Huazhong University of Science and Technology Press,2006.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[241270],资料为PDF文档或Word文档,PDF文档可免费转换为Word



