软体机械手的结构设计与实验分析开题报告
2020-02-20 10:00:27
1. 研究目的与意义(文献综述)
夹持器作为机器人机械手末端的执行装置,是机器人与目标物体直接进行接触的关键部件。其抓取目标物的能力及其质量的大小对机器人的工作性能有很大的影响。夹持器大都为刚性结构,其抓取力较大,抓取的目标物大都是外表较坚硬、形状比较规则的目标物,而对于一些易损伤、易变形或形状不规则的目标物如蛋类、水果蔬菜、玻璃等极易在夹持力作用下破损、变形、划伤,因此,对于机械手末端执行器的设计以及夹取力的控制都有很高的要求。
一般基于刚性结构设计的机械手末端执行器不易满足易损、易变形目标物的无损夹取要求,且机械手对夹取力的控制大都通过采用压力传感器的反馈值作为夹持力闭环控制的输入信号。随着材料技术和仿生技术的快速发展,越来越多的研究人员开始关注仿生软体机器人的研究,软体机器人采用可承受大应变的柔性硅橡胶材料制成,具有无限多自由度和连续变形能力,基于这点出现了一些软体仿人手,模拟人手结构和功能的多指灵巧手具有更好的适应性、灵活性和多自由度,可实现抓、握、夹等复杂灵活的拟人动作,但这些具有软体结构的大柔性灵巧手往往具有柔性大而刚性不足的缺点。
目前国内外所研制的灵巧手以刚性的机械结构为主,柔性较少。刚性机器人多由限制了弹性变形能力的刚性材料制成,其形状适应特定的外部约束与障碍,具有高度精确性的特点,更倾向于专业化与精确化,它们很难表现出高度可变形能力与对不同情况的适应性;软体机器人较少甚至完全不使用传统刚性材料,而使用流体、凝胶、形状记忆聚合物等可变形的材料,采用流体驱动、物理驱动、内燃爆破驱动等驱动方式,具有无限自由度和连续变形能力,但软体机器人技术还不成熟,在材料、加工、自主控制等方面仍然存在一定缺陷。

如图1所示,此机械手在夹取过程中不使用压力传感器,通过控制传动滑块位移量的进给,即步进电机的转角,以夹取力的大小,完成对易损目标物的快速夹取.因此,为实现对夹取力的快速控制,关键在于基于动力学分析获得传动滑块位移量、驱动速度与夹取力之间的关系。
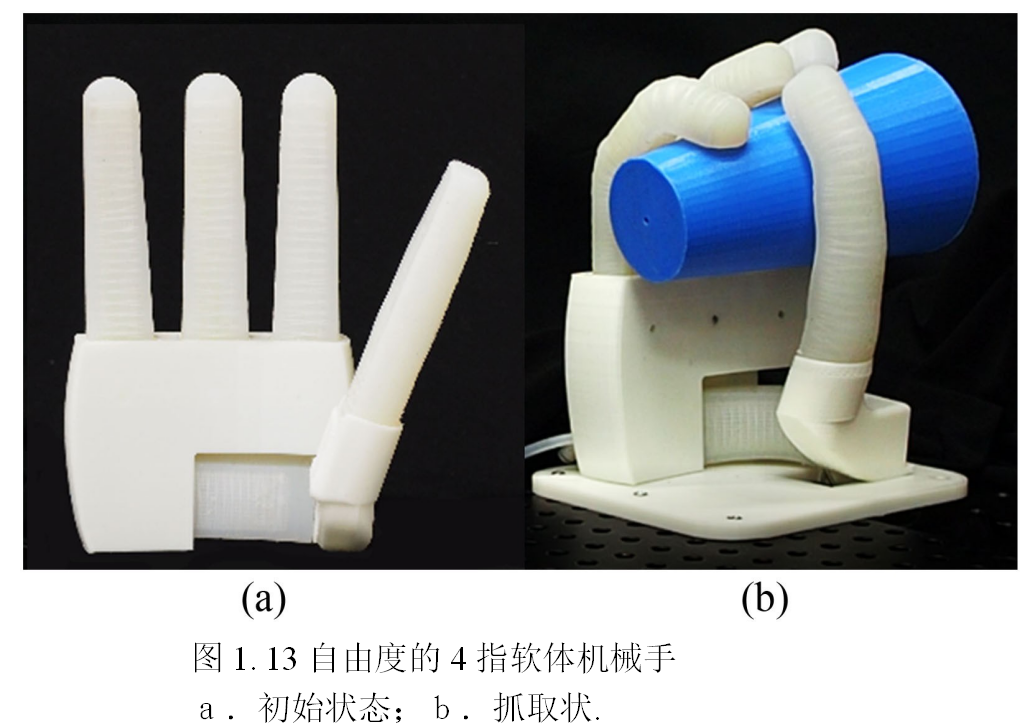
如图2所示为IEEE成员设计的13自由度4指软体机械手,采用软硅橡胶材料制成,每根手指设置有三个关节功能的三个独立腔室,通过气动独立驱动每个腔室使之弯曲,几根手指配合完成对目标物的抓取。
综合以上分析,基于刚性和柔性机械手的结构设计,结合两者的优点,以硅橡胶材料和部分刚性材料制作手指,以气动为驱动方式,优化软体机械手夹持器的设计具有重大意义,其中柔性关节应使手指具有运动柔性,而且手指能够承受一定的载荷。
| | |
| | |
| |
2. 研究的基本内容与方案
基于已有的机械手夹持器设计,了解了国内外关于此的研究现状,分析刚性机械手夹持器和柔性机械手夹持器的设计优缺点,以硅橡胶材料和部分刚性材料制作手指,以气动为驱动方式,进行某些方面的改善设计,设计的柔性二指夹持器应满足功能要求。
设计的内容主要包括以下几个:
(1)整体方案的设计及所需解决的问题;
3. 研究计划与安排
第1-4周:完成调研收集分析有关资料,了解各种夹持器结构及其驱动的原理和方法。提出设计思路和内容,确定方案,完成开题报告。
第5-6周:设计机械手夹持器的结构。
第7-8周:机械手结构的优化设计。
4. 参考文献(12篇以上)
| [1]刘佳,李娜,郝子岩,姜海勇,李朝晖.柔性机械手设计与夹取力动态特性仿真分析[J].河北大学学报(自然科学版),2018,38(02):119-125. |
| [2]李秋苹,章军,崔军.一种欠驱动柔性机械手的抓取力研究[J].轻工机械,2018,36(03):14-17 23. |
| [3]徐丰羽,郭义全,周映江,吴明亮,宋玉蓉.软体机器人的驱动器及制作方法研究综述[J].南京邮电大学学报(自然科学版),2018,38(04):69-80. |
| [4]牛梦格,林松.二自由度夹持器的优化设计[J].制造业自动化,2018,40(09):54-59. |
| [5]马怀振,张家梁,封莹.3D打印末端夹持器的设计[J].机械设计与制造,2018(11):171-174. |
| [6]唐之富,王红军,邓建猛,黎邹邹,黎源鸿,邹湘军.面向大质量串型水果采摘的夹持试验与仿真[J].机械设计,2018,35(11):47-52. |
| [7]古锦波.气动柔性五指机械手的运动学及抓持能力[J].科技展望,2016,26(33):33. |
| [8]张进华,王韬,洪军,王煜.软体机械手研究综述[J].机械工程学报,2017,53(13):19-28. |
| [9]吴君斌. 柔性驱动康复机械手控制系统的设计与实现[D].哈尔滨工业大学,2018. |
| [10]李卓雨.软体机器人的发展应用与展望[J].科技传播,2018,10(23):109-110. |
| [11]崔志军,贾江鸣,鲁玉军,陈宏程.一种刚性与柔性联合驱动的农产品采摘机械手设计[J].机械工程师,2019(01):57-59 63. |
| [12]吕泽良,黄超雷,陈正泉.气动软体机器人执行器的控制与研究[J].装备制造技术,2018(11):5-8. |
| [13]Vincent Babin,David St-Onge,Clément Gosselin. Stable and repeatable grasping of flat objects on hard surfaces using passive and epicyclic mechanisms[J]. Robotics and Computer Integrated Manufacturing,2019,55. |
| [14]Varan Gupta,Rithul Perathara,Aditya K. Chaurasiya,Jitendra P. Khatait. Design and analysis of a flexure based passive gripper[J]. Precision Engineering,2019. |
| [15]肖宇. 气动软体机械手设计及实验研究[D].东南大学,2016. |
| [16]Noh, Y.,Sareh, S.,Back, J.,Wurdemann, H.A.,Ranzani, T.,Secco, E.L.,Faragasso, A.,Hongbin Liu,Althoefer, K.. A three-axial body force sensor for flexible manipulators[P]. Robotics and Automation (ICRA), 2014 IEEE International Conference on,2014. |



