基于车牌识别的智能停车场管理系统外文翻译资料
2022-12-04 14:51:43
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
基于车牌识别的智能停车场管理系统
Qing Tian*, Teng Guo, and Shuai Qiao
College of Information Engineering, North China University of Technology, Beijing, China
*Corresponding author, Email: tianqing@ncut.edu.cn
Yun Wei
Beijing Urban Construction Design amp; Development Group Co., Ltd, Beijing, China
Wei-wei Fei
Systems Engineering Research Institute, CSSC, Beijing, China
摘要:最近一直被广泛研究车牌识别(LPR)正在成为智能交通系统(ITS)的一个重要组成部分。它不仅适用于到公共安全监控,而且还适用于实时跟踪,超速违章追踪,停车场系统等等。本论文介绍了一种基于LRP的之智能停车场管理系统,能够自动获取牌照和方便实现车辆信息综合管理。软件部分是用VC ,QT和Microsoft Office Access数据库开发的。在系统中,LPR通过由帧视频流帧进行选择具有高速的最好成绩。经过准确LPR,车辆信息,诸如LP数,LP颜色,汽车类型和访问时间,将被存储在系统数据库中。此外,该系统接口设计非常友好并且对于管理员能够进行简单操作,这可以在很大程度上提高车牌识别系统的整体性能。实验结果表明,该停车场管理系统可以达到95%的正确率,并且可以适用于实时实现。
关键词:智能停车场; LPR; VC ; QT; Access
引言
随着高速公路和机械化的快速发展,机动车拥有量不断增加。在很多城市,由于缺乏停车空间而产生的问题变得更加紧迫,尤其是在人口较密集的地区。因此,这给驾车出游家庭,带来一定的不便。伴随随着人们生活质量较差和较低水平的平行,交通拥堵,旅行时间的延长,找到停车位的困难 变得更加突出。所有这些方面都确认推动智能停车管理的重要性。
智能交通系统(ITS)包括:技术组以及受周围行驶的许多方面影响的个人的决定,这可以提高交通系统和公共交通的管理。近日,对ITS研究已是当前交通管理的主要方向。虽然一些新技术,例如RFID(射频识别),WSN(无线传感器网络)等,已经提出了车辆ID识别,但是在图片数据上,便利性和低成本上,车牌识别仍是目前其不可缺少的技术。由于车牌(LP)是与各车辆,许可证的唯一信息,因此车牌识别在很多领域得到应用,例如在交通流量控制,自动泊车系统,基于雷达速度控制等。LRP的优点就是,它可以在没有车辆进行停止和无需再车上安装任何设备,既方便又有效。因此,作为智能停车场,停在停车场出入口,LPR可以很容易识别车辆。因此(LPR)在ITS起着非常重要的作用。因此,我们提出了一套基于LPR完整的智能化停车场系统,它能够识别的LP数量和从视频流帧识别LP颜色,并且选择图像中最好的识别结果,然后在数据库系统存储的车辆信息,以便进一步处理。
在以往的工作中,研究人员想出了很多不同程度和复杂性的LPR的解决方案。由于车牌定位是LPR方法的第一步,位置的性能于LPR系统的准确率直接相关。因为不同的LP颜色的和格式,光和环境因素等,在LP定位的过程中有许多困难。Yan Qing[4]为LP定位提出了一种新方法,它基于根据车牌质地和HSV颜色空间。这个方法可以满足实时请求并具有高鲁棒性。实验证明,它在速度,算法复杂条件和精确具有明显的优势。Rami Al-Hmouz和Khalid Aboura [5]推出采用LP本土化的新方法,对盘信号采用离散傅立叶变换的统计分(DFT),结合基于颜色直方图的阈值。在文章中,LP信号由5种统计代表:信号强度,规范化最大振幅,最大振幅的频率,频率中心和频率扩散,使用来自二值图像的板信号,所述方法实现了97.27%的精度。此外,LP字符分割也是LPR算法的一个非常关键的一步。然而,大多数的各种LP分割方法都存在非均匀照明分布的灵敏度,在LP区存在遮阳问题等。Franc 和Hlava [6]曾使用隐马尔可夫链,在车牌字符分割上,制定动态。这种方法已被报道是健壮到噪音,但需要好的精确格式定义。Zhang Wenjuan [7] 2012提出了一个车牌分割方法,通过与空间FCM聚类算法实现信息,这是相当有效和高效的。而一个车牌识别系统通常包括两个主要部分,就是车牌检测和字符识别。Choi 和 Kim [8] [9]提出了一种方法,基于垂直边缘,使用霍夫变换(HT)去检测垂直线和选择每个独立字符,以及提取的集成牌照。但这种方法对于板块边界变形过于敏感,并且耗费时间。Jianfeng, Shaofa
和Zhibin [10]一直致力于中国汽车板系统上的工作。为了正确的车牌提取,他们采用了神经网络的颜色分析法。他们的成功率为95.7%。Lotufo, Morgan 和 Johnson [11]提出使用光学技术自动字符车牌识别识别。在交通视频数据集的车牌的检测与识别上,Lihong Zheng, Xiangjian He [12]等提出了一种算法。他们应用包括全球边缘特征和局部Haar特征,以构建级联有160个性能的六层分类。对于LPR,一个开源的OCR要被修改和使用。此外,有很多方法,如利用神经网络的颜色提取,使用模板匹配的字符识别或使用对于车牌定位的色彩信息等等。
这里我们使用VC 和Qt编程模式,它有一个美好的,友好的界面。 LPR后,车辆信息的处理存储在Microsoft Office Access数据库中。所提出的系统为管理员提供各类分析报表服务。 在在下一部分中,我们介绍的车牌识别系统的性能。第3节介绍的系统框架和LPR模块分析。在第4节,一个实验平台建成。结果表明,该系统具有良好的鲁棒性,高识别性和实时性。最后,本文在总结第5节。
车牌识别系统的性能
与使用其他的方法的停车场管理系统相比,如手动记录,RFID卡和雷达装置,LPR系统有其独特优势以及技术困难。
首先, LPR的优点之一就是,只有某些特定字符,十个阿拉伯数字识别需要被识别。换句话说,车牌识别系统具有较少的识别分类处理。
其次,LP区域是在汽车图像如此之小,以至于字符是更加难以定位,段和检测。并且,在LP上有相似的字符,如数字“2”和字母“S”,数字“8”和字母“B”,数字0和字母O,Q和D。
第三,从车辆图像上来说,由于点的变化和倾斜的情况,车牌识别的任务是相当具有挑战性的工作。此外,在图像采集期间,车身和LP地区也有类似的颜色,多样式的车牌格式和非均匀照明条件,特别是在检测高快速车的情况也是其中的原因。
考虑到上述几个事实,提出LPR系统的一般设计遵循这样的原则,可靠性,高效率的,节能,环保,诚信和人性化。也就是说,该系统运行稳定,识别LP相当快和准确,并且不需要使用中可能会被破坏的卡, 诚信和人性化的管理体制,界面便于操作,收取停车费用,并生成月度或年度报告。
因此,该系统具有三个基本至关重要模块,分别是,使用图片进行LP定位,使用适当的
使用合适的算法进行LP字符提取与分割,和使用识别算法进行LP字符识别。事实证明使用视频流的方法去实现一帧一帧的识别达到最佳的结果是相当有效的。
系统框架和模块分析
所提出的智能停车框架系统包括车辆检测模块,访问控制模块,和系统管理软件模块。
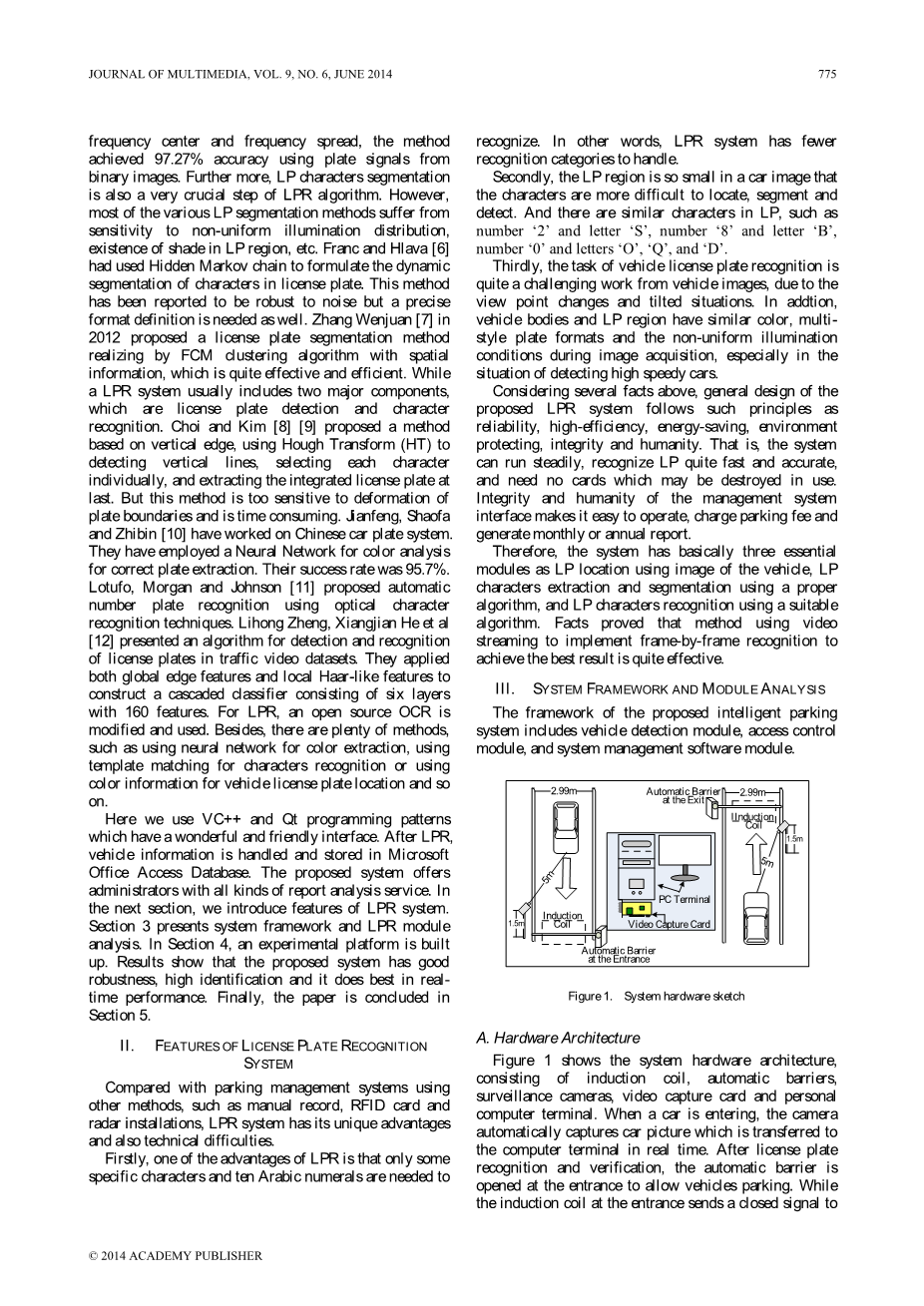
图1系统硬件示意图
A 硬件体系结构
图1显示了系统的硬件架构,由感应线圈、自动障碍,监控摄像头、视频捕捉卡和个人计算机终端。当车进入时,相机自动捕捉汽车转移到图片实时的计算机终端。在车牌识别和验证后, 入口处,自动障碍被打开,允许车辆停车。而入口处的感应线圈发出一个封闭的信号给自动障碍让它掉下来。此外,障碍可以通过控制器和软件操作员界面上的按钮开启和关闭。同样的,当车离开时,相机将抓拍汽车图片,将与入口处的照片对比,摄像机采用高清摄像机,可以适应复杂的环境中,例如各种天气、光线条件和汽车运行。安装角度和高度相机应该准确 (见图1)。计算机终端采用视频采集卡安装,处理实时视频检测,捕捉和转换的任务。
B系统管理软件的实现
系统的基本结构和流程图如下(见图2),本文集中在整体停车管理系统的效率上,包括LPR算法的有效性和系统接口操作方便性和快速性,防止错误的识别结果。
图2数据处理的流程图
在图2中,车辆数据通过视频捕捉卡被收集和转移去控制计算机。在一系列的图像检测和预处理后,LPR在提出的系统的模块中将发挥关键作用。最后, LP识别由管理员确认并存储在系统数据库中。
C 车辆数据采集
此模块的功能是获取前方的,清晰的,在相对处于良好状态亮度下车辆图像。然而,为了获得一个适当的车图片和面临的不均匀照明的LP地区,图像必须被分成许多块去过滤和处理[13]。因此,安装相机的位置和角度是至关重要的。在这个模块中,车辆视频被实时传输到控制终端。在停车场入口和出口,汽车可以使用图像信息, 由管理员检查确认LP和保证停车付款。
D LRP 算法
实际上,LPR系统包括三个至关重要的处理阶段。首先,系统处理传入的视频流和大致定位潜在的LP地区。在这个步骤中,它会检测并纠正倾斜LP,确保位置和验证精确。在第二阶段,LP字符和数字分段[14],LP字符和数字被提取,特别是从复杂的情况伴随着各种噪声源。最后,开始识别。在图3中描述LPR模块软件流程图。
图3 LPR模块软件流程图
在实时自动LPR的技术中,快速和准确定位LP是一个非常关键的步骤。这也是一个典型的图像分割问题, 从复杂的背景迅速而准确地开拓LP地区是个是一个艰难的工作。这需要对噪声,光照变化,LP缺陷、倾斜、变形和其他不利的条件敏感的定位算法。这里我们研究,讨论和比较几个LP位置算法如下:基于线性检测方法,基于灰度的边缘检测方法,基于形态学方法,基于纹理特征的方法[15],和基于颜色特征的方法[16]。表1显示了这些LP的定位算法不同性能。
表1比较不同的LP的位置算法
在本文中,我们考虑上述影响因素,将高垂直的图像特征边缘考虑其中,用水平的边缘检测方法纠正倾斜LP。两个步骤后,LP地区可以准确定位。
(a)
(b
(b)
图4 a)入口处的视频和图片, b)出口处视频和图片
一旦确定了LP区域被识别和验证,它继续细分步骤中,在LP图片中,准确的分割字符,然后去识别。有很多种分割方法,如使用字符之间空间和距离的分割 [17],通过投影水平和垂直方向投影的分割[18],通过识别可靠性分割(17、19)。所有这些分割方法可以在一定程度上结合去更准确地从复杂背景中提取LP字符。
在识别过程中,我们需要从每个单独的字符和数字信息提取具体信息,这被称为特征提取。因为LP的效率识别是基于智能停车系统的LPR,关键。一个简单的特性提取方法应该被使用。在[17]中,对通过模板匹配的LP识别进行了探讨。这个方法可以快但对于噪声太敏感。使用支持向量机(SVM)的算法最近很受欢迎。它是灵活并且节省时间。基于统计特性和神经网络的方法都是成熟的技术,然而,任何单独的算法被认为是可靠的吗。表2显示几个车牌识别算法的差异,这是目前最常用的方法。
表二 几个LP的表演识别算法的差异
E 数据库管理
Microsoft Office Access数
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[28961],资料为PDF文档或Word文档,PDF文档可免费转换为Word



