单幅水下图像修复 ----蓝绿波段去雾,红色波段校正外文翻译资料
2022-11-19 14:17:27
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
单幅水下图像修复
----蓝绿波段去雾,红色波段校正
李重仪 郭继昌 陈善继
天津大学电子信息工程学院
青海民族大学,物理与电子信息工程学院
国家海洋技术中心
摘要:
对单个图像来进行水下复原是不合适的,并且以前关于水下图像修复的一些设想在很多情况下都不合适。在本文中,我们提出一种基于蓝绿通道去雾和红色校正的方法。
首先,通过基于暗通道先验的去雾算法来恢复蓝绿色通道。然后,使用灰色世界假设理论来修正红色通道。最后,为了解决一些恢复图像区域可能存在外观太暗或太亮的问题,我们建立了自适应曝光地图。定性分析表明,我们的方法显著提高了能见度和对比度,并减少了影响光的吸收和散射。定量分析表明,我们的结果在熵、局部特征,点和平均梯度方面获得最佳值,并且优于现有的三物理模型可用的方法。
关键字-水下图像恢复、图像去雾、图像增强,能见度恢复
引言
因为神秘的海底世界蕴藏着丰富资源,所以水下图像增强和复原的研究是很有意义的,在摄影和计算机视觉应用都是需要的。然而,因为水下环境的特性,捕捉清晰的水下图像是很有挑战性的。光的吸收和散射以及衰减变化导致了水下图像的降质。考虑到单幅水下图像广阔的应用前景,这门技术已经成为研究的热点。
水下图像可以由一个直接分量、前向散射分量和后向散射分量线性叠加而成。
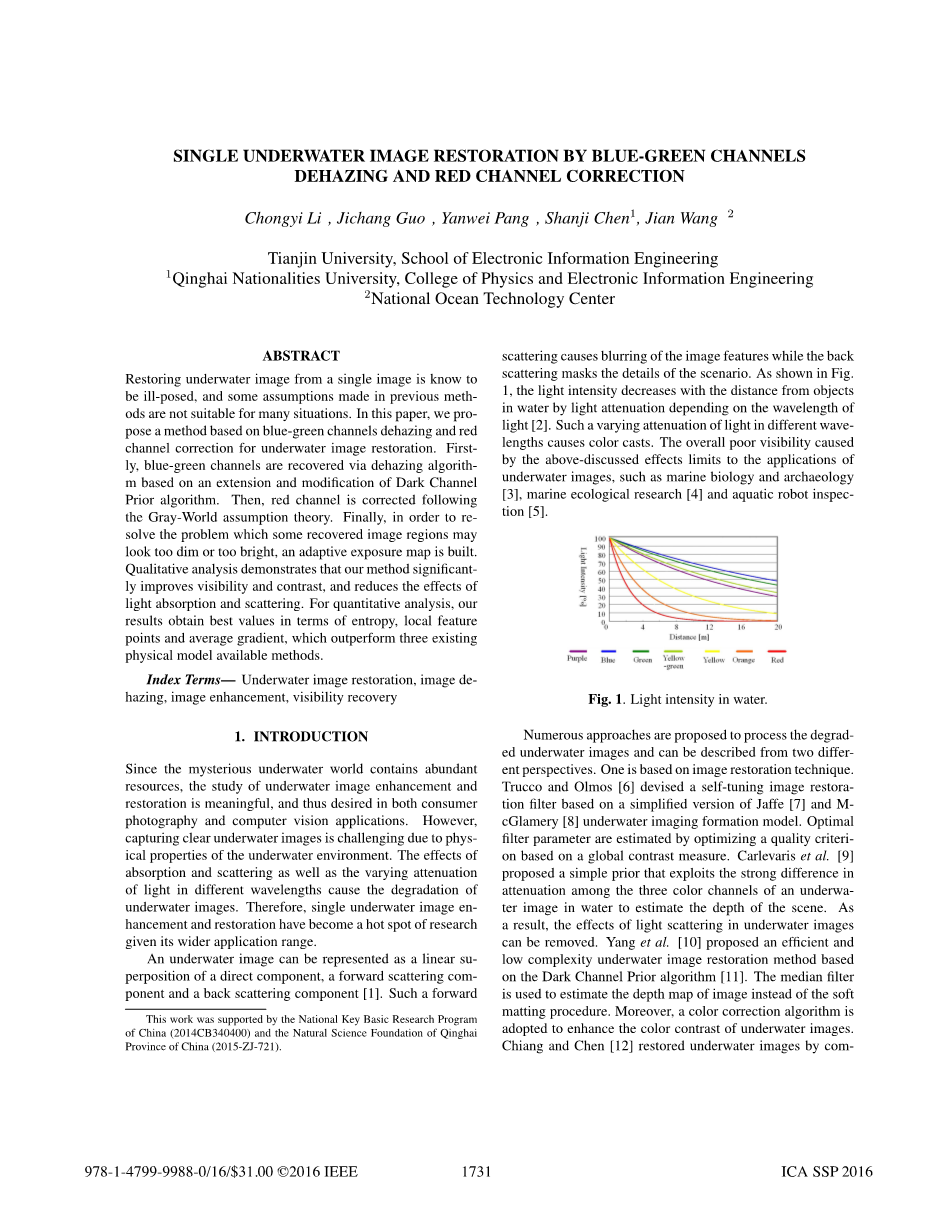
前向散射导致图像特征模糊,后向散射掩盖了场景的细节。如Fig.1所示,光强度随物体距离的减小而减小,水中的光衰减取决于光源的波长〔2〕。这种不同波长的光的衰减变化引起颜色转换,整体能见度差。通过以上讨论可以发现,水下图像的质量低下导致了对诸多研究领域的限制,如海洋生物学和考古学〔3〕海洋生态研究〔4〕与水生机器人检测〔5〕。
因此人们提出了许多处理退化的方法水下图像,可以从两种不同的角度来描述。一是基于图像恢复技术。比如:借鉴JAFE(7)和麦格拉梅里的简化版本的滤波器〔8〕水下成像形成模型后,Truto和olmos(6)设计了一种自校正的图像恢复方法。这种方法通过对一种基于全局对比度的质量准则进行优化,估计出最优滤波参数。而卡莱瓦利斯等〔9〕则提出一个简单的先验,利用水下图像在水中的三种颜色通道之间的强烈差异来估计场景的深度,从而去除水下图像中的光散射效应。杨等人〔10〕提出了一种有效的基于暗通道先验算法〔11〕的水下图像复原方法。采用中值滤波法代替软抠图法来对图像的深度图进行估计。并采用彩色校正算法提高水下图像的颜色对比度。Chiang和陈(12)提出了一种波长补偿的消光算法。通过暗通道先验算法[11],消除了彩色散射对雾霾的影响。根据每个波长的衰减量,,进行反向补偿,修复由彩色散射引起的失真。
加德兰等〔13〕提出了一种基于红色波段的方法,该方法中恢复了与短波波长相关的颜色,并且修复了对比度的缺失。总之,图像复原技术可以在一定程度上消除水下图像的雾度。然而,这些技术受到精度假设、光学模型和估计参数的限制。
另一种技术是基于图像增强技术。安库蒂等人。基于水下图像和视频的视觉质量融合原理,Ancuti〔14〕提出了一种新的增强策略。Chani和ISA(15)通过集成技术降低水下图像噪声具有瑞利分布的颜色模型的方法提高了对比度。基于脱色与色彩校正,李与郭〔16〕提出了一种基于水下图像的增强方法。但是,水下图像增强技术通常产生不足或过度增强的地区,因为这种技术不是基于水下成像模型。
图1 在水中不同颜色光的强度
二 理论介绍
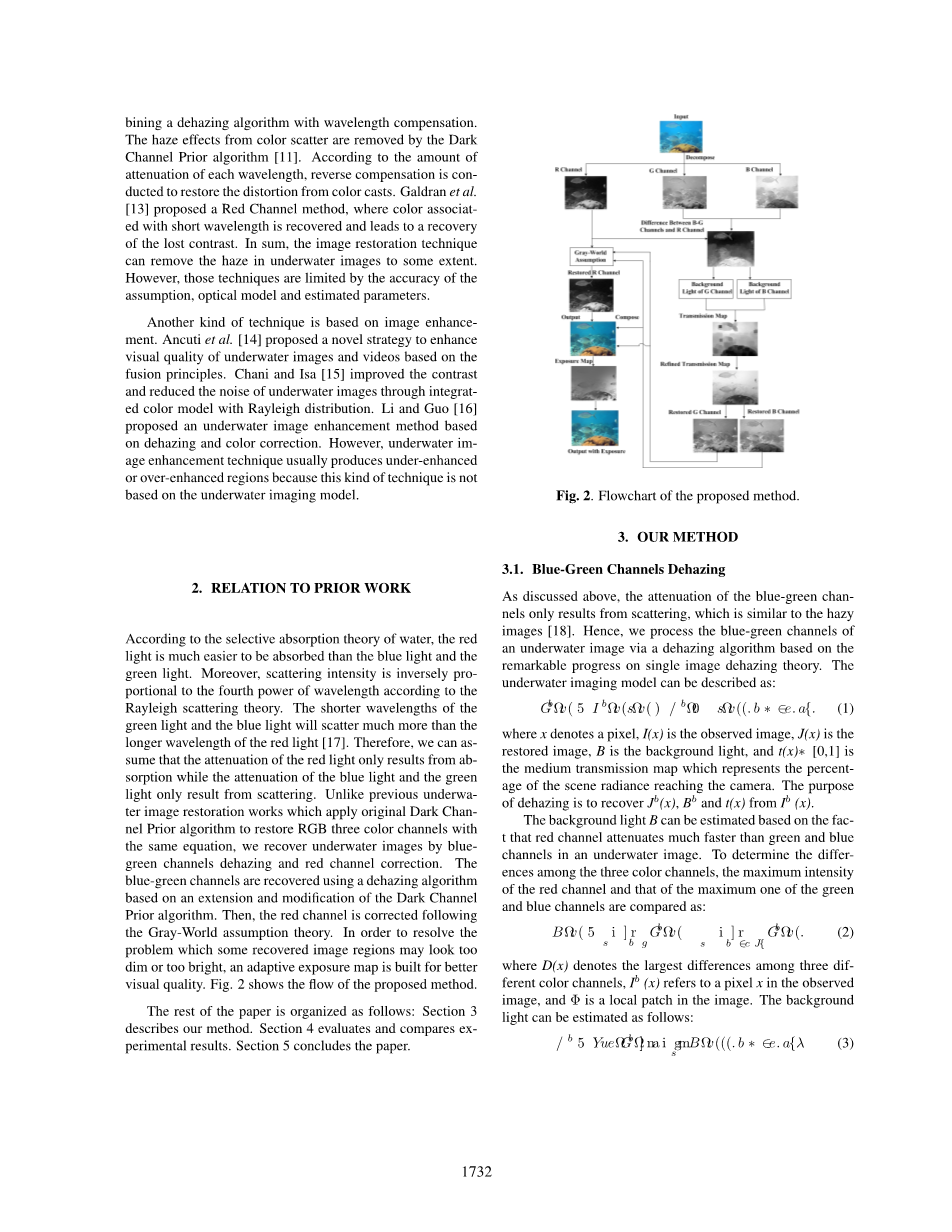
根据水的选择性吸收理论,红色光比蓝光和绿光更容易被吸收。而且,根据瑞利散射理论,散射强度与波长的四次方成反比。绿光和蓝光红光的波长长〔17〕,散射强度就高。因此,我们可以假设红光的衰减只因吸收而产生。而蓝光和绿光的衰减光只因散射而产生。不像以前的水下应用原始暗通道的图像恢复工程RGB三彩色通道恢复的先验算法同样的等式,我们用蓝绿色恢复水下图像。通道去雾和红色通道校正。这个使用去雾算法恢复蓝绿色通道基于暗通道的扩展和修正先验算法。然后,运用灰色世界假设理论对红色通道进行校正。为了解决一些恢复的图像区域可能看起来也有问题的情况---光源过于昏暗或过于明亮,建立自适应曝光地图可以得到视觉质量。图2展示出了所提出的方法的流程。
论文其余部分整理如下:第3节描述了我们的方法。第4节评价和比较实验结果。第5部分结束论文
三 方法介绍
3.1。蓝绿色通道脱雾
如上所述,蓝绿通道的衰减,只与散射有关,类似模糊图片〔18〕。因此,我们用一种去雾算法处理蓝绿色通道,这种方法在单图像去雾理论方面取得了显著进展。这个水下成像模型用公式可以描述为:
I c (x) = J c (x)t(x) B c (1 minus; t(x)), c isin; {g, b}, (1)
其中x表示像素,i(x)是观察图像,j(x)是恢复图像,B是背景光,T(x)[0,1]是
代表百分比的媒体传输图到达相机的场景亮度。目的去雾是恢复J c (x), B c 。
背景光B可以基于事实来估计:在水下图像中的通道中,红色通道比绿色和蓝色衰减得快得多。为了确定在三种颜色通道中的差异,用最大强度红色通道和绿色通道与蓝色通道进行比较,可以表示为:
D(x) = max xisin;Ω,cisin;r I c (x) minus; max xisin;Ω,cisin;{g,b} I c (x), (2)
其中D(x)表示三种不同的最大差异,颜色通道C(x)是指观察到的像素x。图像,并且是图像中的局部贴片。背景光可以估计如下:
B c = avg(I c (arg min x D(x))), c isin; {g, b}. (3)
根据瑞利散射理论,蓝光和绿光在水中的衰减是一样的。因此,我们假设蓝色的中等传输图和绿色通道是相同的。此外,我们还假设在本地补丁中的介质传播系数是常数。方程(1)被重新排列并取最小值。局部修补中的操作:
min c (min xisin;Ω ( I c (x) Bc )) = t(x) min c (min xisin;Ω ( J c (x) Bc ) 1minus;t(x), (4)
等式(4)右边的第一个术语应该趋向于基于暗信道先验理论的零。因此,绿色通道和蓝色通道的介质传输图写成:
t(x) = 1 minus; min cisin;{g,b} (min xisin;Ω ( I c (x) Bc )). (5)
如图3(b)所示,在地图T(x)中存在一些晕和块伪影。之所以会产生光晕和块效应,是因为t(x)是通过一个图像块计算的,产生了粗略的初始估计。为了解决问题,应用引导滤波器〔19〕对粗化进行细化。图3(c)显示细化的介质传输图。
图3。中等传输图。
(a)原始水下图像大小为600times;400。
(b)粗介质传输地图。
(c)细化介质传输图。
利用精细介质传输图及所获得的背景光,根据等式(1),我们可以恢复无雾霾的绿色和蓝色通道。具体来说,通过以下方式可以恢复无霾通道:
J c (x) = I c (x) minus; Bc t c(x) B c , c isin; {g, b}, (6)
J c (x)表示恢复的信道。
3.2。红色通道校正
红光的吸收率很难单独获得水下图像。受到灰色世界假设的启发,理想中物体颜色平均值是理想的,而图像是灰色的,我们根据假设校正红色通道,它可以写成:
(AVGRR AVGBR AVGGR)/ 3=0.5,(7)
其中AVGRR、AVGBR和AVGGR分别是归一化平均值。恢复的红色通道、蓝色通道和绿色的值。
恢复的红色的平均值频道可以估算如下:
AVGRR=1.5,AVGBR为AVGGR。(8)
然后,补偿系数delta;可以计算为:
delta;=AVGRR/AVGR,(9)
其中AVGR是归一化的原始的红色通道平均值。利用公式可以得到恢复的红色通道RCRE:
RCRE= R.delta;,(10)
其中R是归一化的原始红色通道,delta;是估计补偿系数如图4(b)所示,蓝绿通道去雾和红道修正后处理,清晰可见性,校准彩色铸件增强对比度实现了。
图4。恢复结果。
(a)原始水下图像尺寸为600times;400。
(b)未经恢复的结果自适应曝光图
(c)用AN恢复结果自适应曝光图
红色矩形表示细节。.
3.3基于观察到的暗或亮区域进行自适应曝光图估计
通过我们的方法,水下图像在处理后变得太暗或太亮,我们采取自适应曝光地图〔20〕调整结果。自适应曝光图S(x)CAN通过求解最优化问题得到:
min s sum; x {[1 minus; s(x) YJ(x) YI(x) ] 2 lambda;[s(x) minus; 1]2 } Phi;(s), (11)
其中S(x)是自适应曝光图,YJ是照明。恢复图像的强度,易是照明输入图像的强度,La=0.3是常数,Phi;(s),是一种平滑正规化。
优化问题可以使用两步法近似求解。第一,求解s(x)不使用光滑正则化,它有一个封闭形式的解决方案:
s(x) = GFI [ YJ(x)YI(x) lambda;Y 2 I(x) Y 2 J(x) lambda;Y 2 I(x) ]. (12)
可以拓展为:
OutputExp = J c (x). lowast; s(x), c isin; {r, g, b}, (13)
J c (x)是恢复的图像,s(x)是自适应曝光地图。图4(c)显示了应用自适应的结果曝光图
四 实验结果
为了评估所提出的水下性能图像恢复方法,我们与我们的方法进行比较现有的三种方法:CARLVARIS等人〔9〕的方法,杨等人(10〕的方法以及HE等人的方法。〔11〕他们都是基于水下成像的光学模型和去雾算法。用不同的方法来进行定性与进行定量评价以评估性能。由于空间有限,我们只举几个例子的处理结果。
4.1。定性结果
由于大气之间的区别图像散射模型和实际水下光学模型,从图5可以看出他的图像成果对水下几乎没有影响。卡莱瓦利的方法可以消除霾。然而, CARLVARIS的解决方案可以在前景中揭示一些细节。杨的结果通常含有明显的颜色。
图5。定性比较。
(a)原始水下图像大小为600times;400:图像1,图像2和图像3自上而下。
(b)HE的结果。
(c)卡莱瓦利斯的结果。
(d)杨结果。
(e)我们的结果。
4.2。定量结果
不同于常见的图像质量评价或共同图像恢复区,没有简单的方法可以参考图像,这使得水下图像难以评估。我们认为图像恢复的主要目标是强调图像特征和信息内容。
表1显示了比较值的熵,SIFT。(尺度不变特征变换)局部特征点〔21〕水下平均坡度(AVG)值图5所示的图像。熵的价值代表了包含在恢复图像中的有价值的信息。这个SIFT局部特征点表示全局对比度和局部特征。特征,而AVG表示对比度和细节变化。最好的结果用粗体面值表示。
表1显示了我们的定量表现方法在其他方法中脱颖而出。熵,SIFT和AVG方法可以增加有价值的信息,全局对比度,水下图像的局部特征和细节。因此,定性和定量评价证明我们的方法优于其他三种方法,并能有效提高视觉质量水下图像。
五 结论
我们提出了一种水下图像复原方法:蓝绿通道去雾与红色通道校正。定性和定量评价表明,这种方法可有效祛除雾霾,恢复自然外观增加对比度、梯度和局部特征水下图像。并且,我们的方法优于现有的三种方法。
6。参考文献
[1] R. Schettini and S. Corchs, “Underwater image processing: state of the art of restoration and image enhancement methods,” EURASIP Journal on Advances in Signal Processing, vol. 2010, pp. 14, 2010.
[2] A. Yamashita, M. Fujii, and T. Kaneko, “Color registrati on of underwater images for underwater sensing with consideration of light attenuation,” in Robotics and automation, 2007 IEEE international conference on. IEEE, 2007, pp. 4570–4575.
[3] M. Ludvigsen, B. Sortland, G. Johnsen, and H. Singh, “Applications of geo-referenced underwater photo mosaics in marine biology and archaeology,” Oceanography, vol. 20, pp. 140–149,
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[23762],资料为PDF文档或Word文档,PDF文档可免费转换为Word



