船舶进出三峡升船机船厢操纵运动建模及仿真计算毕业论文
2020-04-03 13:13:41
摘 要
本文主要运用MMG分离模型,在考虑了浅水效应和岸壁效应影响的基础上,建立了船舶在进出三峡升船机这一受限水域的操纵运动数学模型。然后用Matlab编写了仿真计算程序,并用一条已知试验数据的船来进行试算,以此验证所建模型的正确性。在证明模型无误之后,用给定的船舶在受限水域内的操纵运动分别进行了浅水效应模拟、岸壁效应模拟,并对模拟结果进行了分析,给船舶进出升船机航行时提出了一些参考建议。
关键词:受限水域;浅水效应;岸壁效应;船舶运动仿真
Abstract
In this paper, the MMG model is used to establish a mathematical model of the ship's maneuvering motion in the restricted waters of the Three Gorges ship lift, taking into account the effect of shallow water effect and shore wall effect. Then the simulation program is written in Matlab, and the trial is done with a ship with known test data to verify the correctness of the model. After the model is proved to be unmistakable, the simulation of shallow water effect and the effect of the bank wall effect are simulated with the maneuvering motion of the given ship in the restricted waters, and the simulation results are analyzed, and some reference suggestions are given to the ship entering and leaving the ship lift.
Key Words:the restricted water area;the effect of shallow water;bank-ship interaction effect;the simulation of the ship maneuvering motion
目 录
第1章 绪论 1
1.1研究背景及意义 1
1.2研究现状 1
1.2.1 船舶操纵运动建模研究现状 1
第2章 船舶进出三峡升船机船厢操纵运动数学模型 4
2.3.1 作用于船体的水动力 6
2.3.2 作用由于船上的惯性力及力矩 8
2.3.3 螺旋桨产生的作用力 9
2.4 浅水效应对船体水动导数的影响 12
2.4.1 浅水效应对纵向水动力导数的影响 12
2.4.2 浅水效应对线性水动力导数的影响 13
2.4.3 浅水效应对非线性水动力导数的影响 14
2.5 岸壁效应 15
2.5.1岸壁效应简介 15
2.5.2影响岸壁效应因素 16
2.5.3岸壁效应计算 16
第3章 模型的仿真与验证 18
3.1深水无外力干扰下的操纵运动模型 18
3.2主程序流程图 18
3.3模型的验证 20
3.3.1回转性验证 20
3.3.2浅水效应仿真 21
第4章 岸壁效应仿真 22
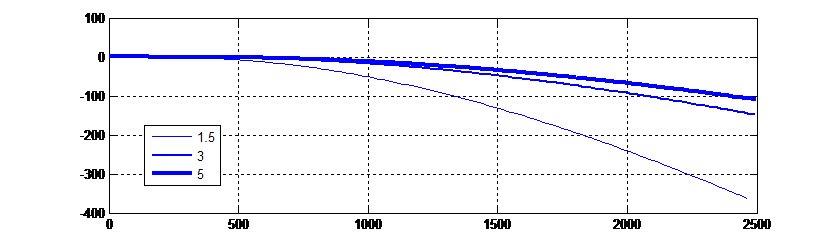
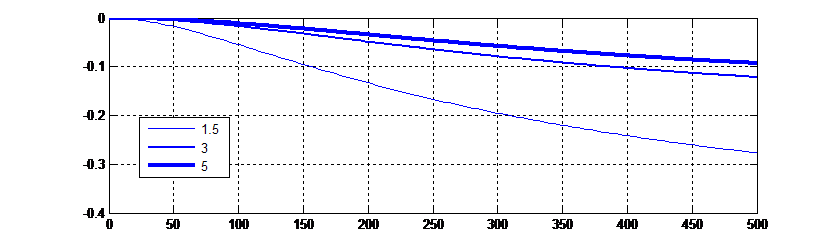
4.1不同水深下的岸壁效应仿真 22
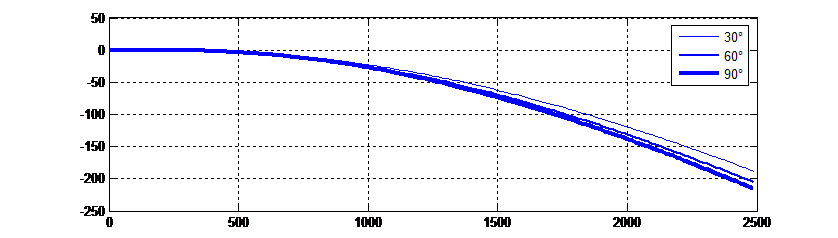
4.2不同岸壁倾斜角下的岸壁效应仿真 23
4.3不同岸壁距离下的岸壁效应仿真 24
4.4不同航速下的岸壁效应仿真 25
第5章 总结与展望 27
5.1总结 27
5.2 展望 27
参考文献 28
附录 29
岸壁效应计算代码 29
致 谢 31
第1章 绪论
1.1研究背景及意义
三峡升船机全线总长约5000米,船厢室段塔柱建筑高度146米,最大提升高度为113米、最大提升重量超过1.55万吨,承船厢长132米、宽23.4米、高10米。三峡升船机承载船型的设计定位主要适应3000吨级大型客轮、旅游船,及部分运送鲜活快速物资货船。运营后,这类船舶过坝时间由通过永久船闸的3.5小时缩短为约40分钟。投入运行后,三峡升船机为客货轮和特种船舶提供了快速过坝通道,大大缓解了三峡枢纽通过能力不足与日益增长的长江上下游水运量之间的矛盾。但是,在船进升船机船厢的过程中,由于受到船厢水深和宽度的限制,船体会受到明显的岸壁效应和浅水效应,即产生偏航力和力矩,在很大程度上影响船舶的安全航行。近年来,客船事故时有发生,引起了社会各界人士的广泛关注,而三峡升船机服务的主要对象为客船,这就使得研究船舶在进升船机船厢时受到的水动力变得尤为重要。
1.2研究现状
1.2.1 船舶操纵运动建模研究现状
国内外学者通过对船舶运动数学模型的理论计算方法进行了不断地研究,取得了非常丰硕的结果。戴维森等人于 1946 年首次提出船舶操纵运动方程。1967年,以泰勒级数展开方式,建立了六自由度船舶操纵运动数学模型,对于船舶操作性的研究,特别是在非线性的水动力数学模型方面有着重要的意义。而随着计算机在数学上的应用,Chislett等人通过在计算机上运算模拟,利用阿勃科维奇方程,通过大量实验,对“Mariner”号的 Z 形操纵实验以及回转试验进行了数值计算,使得阿勃科维奇的船舶操纵运动模型开始慢慢被越来越多的研究这一方面专家学者认可和使用。同样的在1967年,日本的数学模型小组(Mathmatic Modelling Group,简称 MMG 小组)通过对约束船模的大量试验,终于得出了“分离式水动力数学模型”,即MMG模型,MMG模型建立了船、桨、舵的水动力导数的计算以及这三者之间的相互干扰的影响。当然,有时也会将船、桨和舵三者(欧美学派的整体模型)或其中两两进行组合进行实验研究水动力导数。在1998年,韩国学者 Hoyong Lee,在贵岛的操纵运动数学模型的基础上,做了Planner Motion Mechanism试验(PMM试验),PMM实验使得MMG分离型模型得到了一步的完善。MARSIM 会议于2003年在日本成功召开,日本学者贵岛在他提出的模型中加入了估算船舶尾形系数影响的方程式,进一步提高了对船舶运动操纵性进行预报的准确度。在最近几年,国内外的学者对船舶操纵运动的数学模型的研究主要集中在特殊的实际问题。例如,Senda 和 Kobayashi 等人通过大量实验,在应用前辈们的理论成果和试验资料,对船舶减速、停船的工况进行了建模仿真和控制算法的研究并取得了不错的成果。Benvenuto等人建立了对船舶推力系统的计算模型,和实船实验结果进行对比研究后,准确度得到了检验。遗憾的是,我国很晚才开始对船舶操纵运动的仿真进行研究,周昭明教授等在大量船模实验的基础上,成功地归纳出回归公式来计算“井上模型”的非线性水动力导数。李美菁、乐美龙等人在考虑浅水效应以及风、浪、流影响的基础上,进行了多工况操纵性仿真预报。杨盐生、陆惠生、董国祥、蒋维清以及李殿璞等人都做了大量关于船舶数学模型的工作。近年来,国内外也有很多专家学者利用切片理论对船舶的操纵运动状态进行了大量的研究。在20世纪60年代以前,基本上国内外学者对于船舶操作性的研究都是针对于海上航行的船舶,而对于在限制航道内(如港区水域、内河等)航行的船舶研究相对而言比较少。近年来,不断发展内河航运,从而国内外越来越多的专家学者开始着手研究内河船舶等限制航道的操纵运动,并且利用计算机仿真技术(MATLAB 等)来模拟岸壁效应对船舶运动状态的影响。
1.2.2水动力导数研究现状
准确的仿真预报的船舶操纵运动对保证船舶航行安全有着重要的作用,而在仿真预报中,求取船舶操纵运动的水动力导数的准确度的影响非常大。现在,计算船舶水动力及其导数主要有以下几种方法:
试验测定法:分为静态船模试验、约束船模试验、动态船模试验和自航模型试验四种。Goodman和Gertller等人经过很长时间的不懈努力,终于研发出平面运动机构系统(PMM),这使作拖曳运动的船模可以在普通的长水池中做振荡运动,进而可以求出船模的每一项水动力及力矩的线性速度和加速的导数。而Kim利用有四自由度的平面运动机构系统的方法对集装箱船进行了大量的船模试验工作,并且成功得到了相关的水动力导数的值,而后对Zigzage(Z形操纵试验)模拟仿真计算其船舶操纵运动,最终该方法得到的结果与自航模试验结果在很大程度上吻合的很好。
数值计算:即利用CFD仿真软件模拟船舶操纵运动,Ishigu在刚开始设计船舶的时候,就用流体力学计算软件就对设计船舶进行操纵性评估,他用NICE CFD得到船舶操纵运动水动力导数后对操纵运动进行仿真预报,仿真结果很接近实船试验数值。Tanaka等人在不同的伴流条件下,估算出舵力受船尾附近流场的影响,其获取的结果(包括进速和有效冲角)也是非常准确的。
系统辨识法:即基于数据的输入和输出,在众多已给出的模型中,挑出一个与所测的系统可以等价的模型。水动力参数的模型(主要是阿勃科维奇模型)可以应用系统辨识法。第20届国际船模试验池会议ITTC模型(即基于阿勃科维奇模型的改进模型)以及Maneuvering Model Group模型(即MMG分离模型)的水动力导数也是应用辨识方法来确定的。
数据库法:即通过现有的模型或实船试验的数据,得出计算线性水动力系数的回归公式。Wagner Smitt在对30多组PMM试验数据的研究和分析的基础上,给出了计算船舶水动力系数的回归公式;Kijima通过分析不同的人所做的各种船尾形状的研究成果,得出了许多计算船舶水动力系数的公式;Inoueet在对Wagner Smitt和Norrbin发表的研究报告对比分析之后,给出了计算非线性水动力导数的回归公式;Clarke 和Oltma在基于附加质量的数据和试验报告上,总结出计算附加质量的公式。
第2章 船舶进出三峡升船机船厢操纵运动数学模型
当前,船舶操纵运动数学模型的建立方法有两种:一种是欧美用的比较多的整体模型、另一种是日本 MMG 分离模型。两种模型各有其优缺点,整体模型的精确度较高,但成本较大,且一些高阶的水动力导数的物理意义不明确,不能直接应用于另一条船。而分离模型中各项水动力导数的物理意义都很明确,并且经过多年的研究,提出了不少的经验公式来计算船体上的水动力已经舵和桨的作用力。因此本文采用 MMG 运动模型。
2.1 坐标系的建立
研究船舶的操纵运动时,有两种建立坐标系的方式:固定坐标系和运动坐标系。固定坐标系是将坐标原点固定于地球表面,X0 轴与 Y0 轴在水平面内,Z0 轴指向地心,船舶的位置可以用重心坐标(X0,Y0)以及航向与轴的夹角表示,船舶的运动状态可以用这三个量及其各阶导数表示。运动坐标系是将原点放在船舶重心处,X 轴沿船中纵方向,Y 轴沿船中横方向,Z 轴垂直于 XOY 平面。为了计算方便本文建立如图2.1所示坐标系:
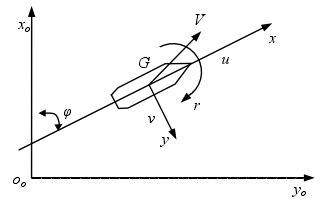
图2.1 平面运动坐标系
2.2 船舶操纵运动基本方方程
 (2.1)
(2.1)
方程中:分别用带下标H、P、R的物理量来表示船体受到的力和力矩,以及螺旋桨和舵产生的力和力矩。而YHhxc则是对力矩进行修正,将其表示成对船舶重心的力矩。并且由于螺旋桨是对称于中纵剖面布置的,其产生的横向力YP及力矩NP相对于其它力是小量,在后续的计算中可以忽略。在下标里加上h表示是进行浅水效应修正以后的量,YB , NB分别表示船舶由于岸壁效应受到的横向力和转首力矩。将上述方程中的物理量按表2.1进行无量纲化:
表2.1 基本量的无因次化表
物理量 名称 | 速度 | 加速度 | 质量 | 力 |
无因次 化公式 |
|
|
|
|
物理量 名称 | 角速度 | 角加速度 | 转动惯量 | 力矩 |
无因次 化公式 |
|
|
|
|




2.3 深水中船体水动力及其模型
利用 MMG 模型计算研究船舶的操作性问题时,可以将水动力分成两大类:即粘性类水动力和力矩、惯性类水动力和力矩。现在,主要有两种模型可以能用近似船模试验统计法来代替约束模型试验法来估算粘性流体动力,即井上模型和贵岛模型。通过阅读文献表明,仿真计算时贵岛模型符合得更好,因此本文采用贵岛模型。
贵岛模型: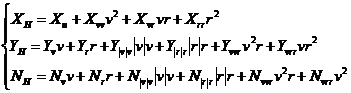 (2.2)
(2.2)
2.3.1 作用于船体的水动力
(1)直航阻力的计算
直航阻力系数:
(2.3)

上式中:S 表示船体湿表面积,采用杨盐生提出的计算公式:
(2.4)


表示 船舶总阻力系数,则
(2.5)

上式中, 分别表示摩擦阻力系数,剩余阻力系数和粗糙度补贴系数。
分别表示摩擦阻力系数,剩余阻力系数和粗糙度补贴系数。
其中,摩擦阻力系数采用1957-ITTC公式计算:
(2.6)

剩余阻力系数可查找系列船型的剩余阻力图谱来进行估算。
粗糙度补贴系数可根据表2.2选取:
表2.2 粗糙度补贴系数表
船长/m | ΔC | 船长/m | ΔC |
50-150 | 0.0004 | 260-300 | 0 |
150-210 | 0.0002 | 300-350 | -0.0001 |
210-260 | 0.0001 | 350-450 | -0.00025 |
(2)其它纵向水动力的计算

(2.7)
(3)线性水动力导数的估算
根据贵岛提出的计算公式:
(2.8)

上式中,d表示平均吃水,λ表示展舷比,且λ=2d/L,τ表示吃水差,且
(4)非线性水动力导数的计算
根据贵岛提出的计算公式,有

(2.9)
2.3.2 作用由于船上的惯性力及力矩
2.3.2.1 船舶自身惯性力及力矩
船体自身的惯性力数值上即等于船体的质量,也就等于船舶的排水量,可以根据下面的公式直接计算得到:
(2.10)

船体自身的惯性力矩可以根据船舶绕自身 Z 轴的转动惯性矩计算,船体绕 Z 轴的惯性矩为:
(2.11)

2.3.2.2 船舶附加惯性力和力矩
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: