船舶操纵与船舶在波浪中的运动的数值分析外文翻译资料
2022-08-24 11:23:16

英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
船舶操纵与船舶在波浪中的运动的数值分析
Min-Guk Seo, Yonghwan Kim
摘要
本文考虑了在存在入射波和由此产生的船舶运动响应的情况下船舶操纵性能的数值分析。为此,开发了船舶时域运动程序,用于解决与船体滑移速度和旋转有关的波浪与船的相互作用问题,还与模块化的4自由度的操纵问题结合。在这个耦合问题中,二阶平均漂移力在船舶操纵轨迹中起重要作用的,它可以使用直接压力积分法进行估算。通过观察有入射波和没有入射波情况下的二阶平均漂移力和操纵实验的平面运动轨迹来验证所开发的程序。比较了两种船舶模型,系数是0.7的60系列船和S-175集装箱船,它们已经存在现有的实验数据。操纵实验中包括观测在静水中的Z型实验,以及在静水中和规则波中的回转实验。目前的结果表明,在操纵轨迹方面的总体趋势是一致的。
简介
通常在静水中预测船舶的操纵性能。这在初始船舶设计阶段提供了非常有价值的信息。 但是,由于船舶始终在波浪中航行,在航海条件下的操纵性能可能与在平静水面条件下的操纵性能明显不同。当船舶在波浪中航行时,波浪引起的运动和漂移力将增加,螺旋桨和舵的效率将改变。 因此,如果波浪的影响和相应的运动响应可以包含在船舶操纵的数学模型中,则估算将更加可靠。 这样的需求要求一种有效的方式将操纵与海上航行结合起来。
尽管成本高昂,但在波浪中进行自由运行模型测试是评估波浪对船舶操纵影响最可靠的方法。 引入了自由运行测试的一些结果:平野等(1980)进行了规则波中的回转实验。上野等(2003)VLCC模型进行了规则波中的回转,Z型和停车实验的规则波。最近,安川(2006a,2006b)利用S175集装箱船模型进行了在规则波和不规则波中的回转实验
同时,为了预测在波浪中航行的船的操纵性能,建立了几个简化的数学模型。例如,平野等(1980)通过使用在静水中运动的3自由度方程仅计算波漂移力估计操纵性能。McCreight(1986)建立了波浪中的非线性操纵模型,其中波引起的运动有关的水动力,例如波浪激振力,以及附加质量和波浪阻尼在船体坐标系中进行评估。 在他的研究中,他的建模已通过使用剥离方法来实现。Ottosson和Bystrom(1991)提出了一种更为简化的方法。附加质量和阻尼系数假定为
常数,该值是由操纵运动过程中平均遭遇频率时获得的。后来,芳等。 (2005年)开发了数学模型来以时域仿真计算水动力.
在上述方法中未考虑由于船舶运动引起的记忆效应。 但是,Bailey等。 (1997年)和福森(2005年)采用了线性卷积积分公式,以考虑到船舶在波浪操纵过程中的非稳态记忆效应。 虽然这种方法比不包括记忆效应的其他方法更可靠,卷积积分的精确计算并不简单,而且,由于多变的遭遇频率和航向角,需要更多的计算时间。而且,在他们的预测方法中,没有精确地计算出波浪漂移力。 为了简单地考虑记忆效应,Sutulo和Soares(2008,2009)采用了辅助状态变量法,该方法比卷积积分法简单得多。他们还根据遇到的频率,利用流体动力对波浪中的细长船舶开发了面向仿真的数学模型. 最近,Skejic和Faltinsen (2008)更加准确地考虑了二阶波动效应。他们使用许多不同的方法计算了二阶平均漂移力,并比较了每种方法。另外,他们提出了一个两倍尺度的模型,该模型将低频运动(操纵运动)和高频运动(耐波运动)分开。Yasukawa (2006a, 2009)还考虑了使用动量守恒方法计算二阶平均漂移力来计算规则波和不规则波的转弯轨迹。但是,船速的影响并未完全包括在内。以前的所有研究都采用二维带状方法来考虑波浪引起的船舶运动。最近, Lin等(2006)和Yen等。 2010年)使用三维直板方法解决波浪中的船舶操纵问题。在他们的研究中,扩展了非线性船舶运动程序LAMP (大振幅运动程序)。yen等(2010)也考虑使用直接压力积分法的二阶平均漂移力。
在目前研究中,波浪中的船舶操纵问题通过使用时域船舶运动方程,WISH (用于非线性波浪感应载荷和船舶运动分析的计算机程序),该程序基于B样条兰金面板法求解。为此,从耐波方程中扩展了两个主要领域:扩展到大型横向运动和耐波和操纵模型的耦合。在这该方法采用直接压力积分法计算二阶平均漂移力,并将模块化操纵模型(MMG模型)与耐波模型相结合。
通过与公开的实验数据进行比较,可以验证开发的计算机程序,例如在静水中进行60系列(方形系数0.7)的Z型实验,以及在静水中和在波浪中进行S-175集装箱船的回转测试。计算结果表明程序与实验数据具有良好的一致性。
2.边值问题
当船舶以非恒定速度行进时,该问题比常规的耐波问题变得更加复杂。尽管边界值问题的形式与常规问题相同,但应包括由于航向速度和角度变化而引起的时间和空间变化。另外,为了解决该问题,需要考虑非线性粘性成分的强烈影响。
2.1坐标系
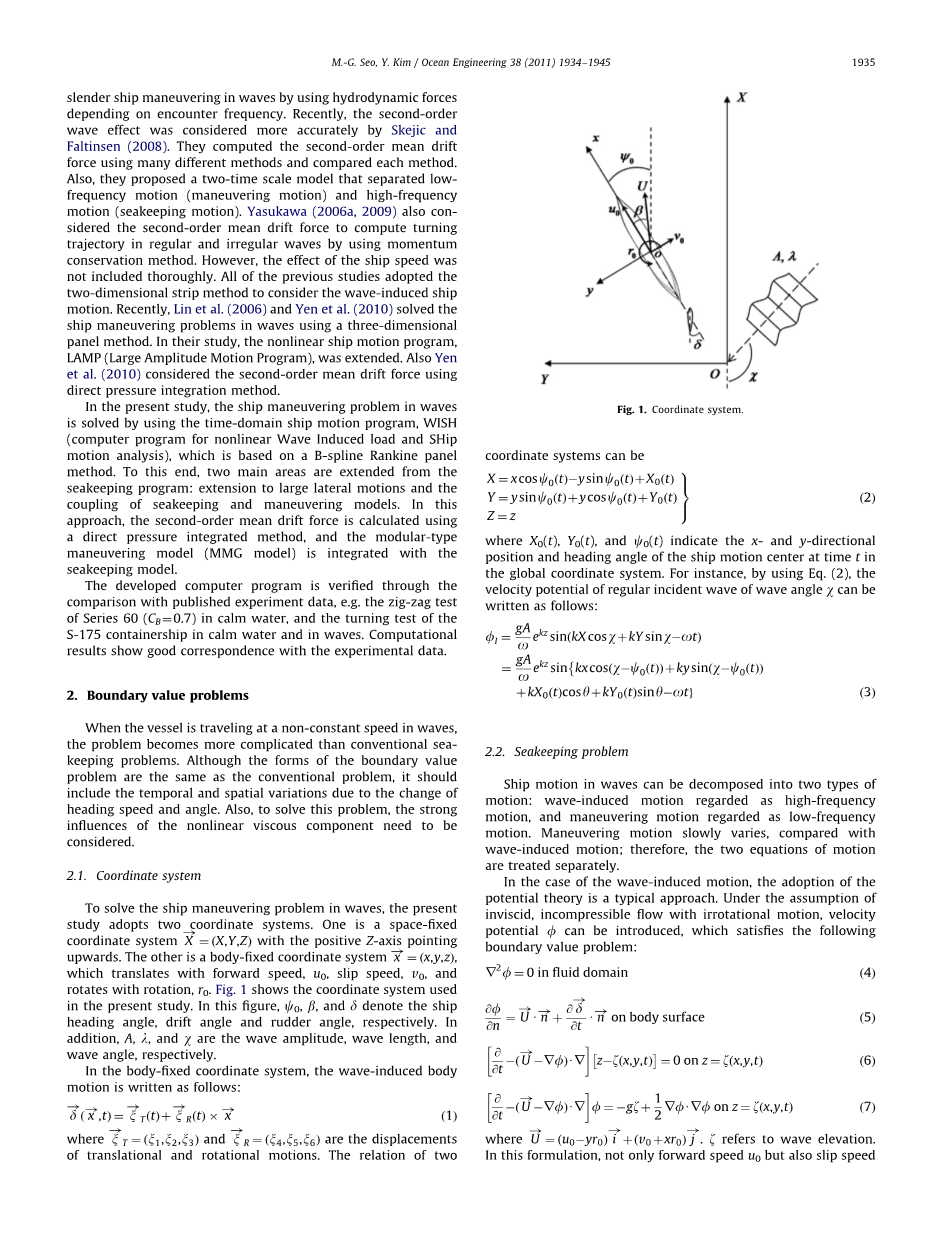
为了解决波浪中的船舶操纵,本研究采用两个坐标系。一个是固定的坐标系,Z轴正向向上。另一个是随船标系,它以速度u向前,滑移速度v进行平移,并以旋转r。进行旋转。图1显示了本研究中使用的坐标系。
在此图中,,B和分别表示船首角,漂移角和舵角。 另外,A,和分别是波幅,波长和波角。在随船坐标系中,由波浪引起的船体运动的写法如下
其中和表示平移和旋转运动。两者的关系可以表示成:
其中X0(t) , Y0 (t)和Z0(t)表示全局坐标系中在时间t处船舶运
动中心的x和y方向位置和航向角。例如,通过使用等式。(2) ,波
角为w的规则入射波的速度势可写为:
2.2.耐波问题
船舶在波浪中的运动可以分解为两种类型的运动:波浪引起的运动被视为高频运动,而操纵运动被视为低频运动。与波引起的运动相比,操纵运动变化缓慢;因此,这两个运动方程是分开处理的。对于波动运动,采用势能理论是一种典型的方法。在具有无旋运动的无粘性不可压缩流的假设下,可以引入速度势,它满足以下边值问题:
其中表示波高,在此公式中不仅有前进速度还有滑移速度v和旋转r。另外,应在每个时间步长考虑这些值的变化。
在这项研究中,采用Neumann-Kelvin线性化方法对边值问题进行线性化。然后将总速度势和波高分解为:
其中表示均匀的流势。和是入射波的速度势和波高,和是扰动势和高度分别。 然后,线性化边界条件取以下形式:
其中,mi称为m项,它包括稳态流和非稳态流之间的相互作用的影响。
应该提到的是不同的线性化方法,可以为上述边界值提供不同的解决方案问题。也就是说,两种线性化方法对于耐波问题: Neumann-Kelvin线性化和双体线性化。Kim和Kim(2010b)表明,两种公式的解可以不同。在这项研究中,采用了
Nuemann-Kelvin线性化。
可以通过如下求解运动方程来获得船舶运动:
其中是船舶质量矩阵,是Fk力,水动力和恢复力。
2.3操纵问题
在船舶操纵问题中,四自由度运动被认为是在固定空间坐标系中。对于这个问题,使用了一套模块化方程式,可以写成如下:
其中x, Y, K, N分别表示纵荡,横荡,横摇,和首摇方向分量,下标H, P和R分别表示作用在船体,螺旋桨和方向舵上的流体动力。另外,下标W表示应从耐波分析获得的二阶平均漂移力。由于运动,转向,阻力等,船体力由线性和非线性部分组成。船体力的某些部分取决于上述的势能理论。船体力分量的其他部分可以从经验公式或模型测试中获得。特别是,螺旋桨和方向舵的力可以从经验公式获得。
3.数值方法
3.1耐波问题
通过使用时域Rankine面板法解决耐波问题。特别地,本研究着重于线性边值问题。为此,WISH程序以恒定的速度解决耐波问题,该程序扩展到包括船舶的横向和旋转运动。wISH程序是在几个大型造船业的支持下在首尔国立大学开发的,它采用了基于B样条基函数的Rankine面板方法作为物理变量(Kim等, 2008; Kim和Kim, 2010a )为了解决线性边值问题,通过离散化边界表面来应用格林的第二恒等式。积分方程表达如下:
在目前的研究中,使用B样条基本函数来估计速度势,波高和沿着流体边界的法向通量。
其中表示B样条基本函数,和表示干扰势系数,波高和法向通量的系数第j个离散面板。通过代入式(16)成等式(10)和(15) , 可以获得自由表面上的速度势的法向通量和表面上的速度势的通量,然后可以通过求解微分方程(11)和(12)来获得自由表面上的波高和速度势。
对于自由表面边界条件的时间积分,应用了混合的显式-隐式欧拉方程。明确求解运动自由表面边界条件以获得扰动波高,而隐式求解动态自由表面边界条件以预测下一时间步中自由表面的速度势,即
其中P和Q是力函数,其中包含自由表面边界条件中的所有其他项。另外,可以通过应用多步时间积分方法来求解运动方程。本研究使用四阶预测校正方法。
通过应用人造波吸收区的概念可以满足辐射条件。在自由表面的截断边界周围分布了一个人造波吸收区,并且对运动自由表面边界条件进行了修改,以包括一个人造阻尼机制。在这项研究中,使用了Nakos (1993)使用的以下方程式:
其中v 表示阻尼强度。
3.2操纵问题
对于四自由度的船体受力由下等式确定,一般形式可以分解为
其中Fpot:是仅由势流产生的流体动力,其余两个部分由于粘性效应。Flift是船体的升力, Fvisc是船体上的附加粘性阻尼力(Lin等人,2006)。这些力是常规操纵方程式的典型分量。 例如,以下表格由安川定义(2006a):
这些参数可以分成等式20的三个部分,例如和与惯性力相关,这些可以作为Fpot的一部分,而和与波浪阻尼和升力相关, Fpot和Flift都包括这些部分,在本研究,由WISH程序直接获得,船体升力作为模块化的升力等效板
其中L, T分别代表船长,吃水, CL代表低纵横比板的升力系数。在这种近似中,采用g来补偿由于板与实际船之间的差异引起的误,其大小为在1.0-2.0的范围内。
非线性分量,例如Xvvv02, Xvrv0r0, Xrrr02, Yvvvv03, Yvvrv02r0, Yvrrv0r02, Yrrrr03, Nvvvv03, Nvvrv02r0, Nvrrv0r02, Nrrrr03 和N(Phi;) 应该包括在附加阻尼力Fvisc中,R(u0)的粘性成分例如在Fvisc也包括抗粘性。在目前研究中,Fvisc,是使用实验数据或
Yasukawa (2006a, 2006b)引入了经验公式,除了粘性横摇阻尼项,粘性横摇阻尼力矩由WISH程序计算得出应用以下形式的等效线性阻尼系数:
其中,m44,m44 (infin;)和c44分别表示转动惯量,在无限频率下增加的转动惯量和恢复系数。实际上是临界阻尼系数,是粘性的大小
阻尼系数可以使用b进行调整。
3.2.2.螺旋桨力
在此计算中,通过使用以下公式获得螺旋桨力:
其中tp, n, Dp,和KT,分别是推力减额,螺旋桨每秒旋转数,螺旋桨
直径和推力系数。推力系数K使用提前比的二阶多项式形式表示,如下所示:
其中J0, J1, J2是常量,可以从敞水测试中获得,而Jp,表示提前率,写
为
其中 表示有效尾流分数,它取决于船的前进和滑移速度,其形式如下:
其中Wp0,表示直行情况下的尾流分数, 而表示几何入射角。
3.2.3.舵力
通过方向舵作用在船上的水动力可以表示为以下形式:
其中d和和分别表示舵角以及作用在舵上的法向力的x方向和z方向中心。此外,表示可以通过实验或经验公式获得的船体与方向舵之间的相互作用。方向舵法向力FN,可以用以下形式表示:
此处AR,和lambda;表示舵的面积和纵横比。UR和aR表示有效的速度和入射角。有效流入速度和角度受到船体尾流的影响,还受船体,螺旋桨和船舶运动的牵连影响。为了估计准确的舵力,准确估算这两个值很重要。要计算这两个量,使用半经验公式。在这项研究中,实验数据和运用Yasukawa (2006a, 2006b)提出的系数值。
3.2.4漂移力
在存在入射波和随之产生的船体运动的情况下,轮船在回转运动期间会经历平面漂移运动。这种漂移运动的精确预测是运动轨迹预测中的基本要素之一。两种主要的分析方法用于计算二阶平均漂移力。一种是基于Maruo (1960)提出的动量守恒理论的远场方法,另一种是通过对船体表面压力进行积分的近场方法。最近对于稳定速度的情况, Joncquez (2008, 2009)和Kim and Kim(2010b)引入了一种公式来计算船舶的附加阻力,特别是通过使用其时域RANKine面板方法。
在本研究中,采用近场方法估计平均漂移力。通过使用伯努利方程和泰勒展开,可以将二阶平均漂移力计算如下(等式30):
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[235790],资料为PDF文档或Word文档,PDF文档可免费转换为Word



