自由流和控制流道路的交通噪声预测外文翻译资料
2022-08-02 10:19:40

英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
自由流和控制流道路的交通噪声预测
——基于一种新的概率统计模型
Feng Lia, Shaoyi Stephen Liaob, Ming Caic,uArr;
a:中国广州广东理工师范大学汽车工程学院,
b:中国香港城市大学信息系统,
c:广州中山大学工程学院;广州广东省智能交通系统重点实验室;广东省交通环境监测与控制工程研究中心。
摘要
本文提出了一种基于车辆噪声排放概率分布模型并通过蒙特卡罗模拟实现的交通噪声预测新方法。用实验方法得到了三种类型车辆噪声排放的概率分布。在此基础上,建立了自由流道路和控制流道路交通噪声预测的概率统计模型。通过与实测数据的比较,验证了概率统计模型的准确性,表明Leq、L10、L50、L90的计算结果和噪声水平发生的概率分布与实测结果吻合较好。结果表明,该方法避免了复杂的交通流仿真过程,而且仍能保持较高的交通噪声预测精度。
关键词:交通噪声 预测模型 概率分布
1.引言
目前道路交通的发展给城市带来了严重的噪声污染。准确的交通噪声预测是交通噪声控制的前提,也是环境管理的重要任务。目前流行的交通噪声预测模型有两种:稳态计算模型和动态仿真模型。稳态计算模型可以用于根据平均交通量、平均车速等来预测一段时间内的平均交通噪声。研究人员在交通噪声预测方面做了大量的工作,并建立了各种有影响的稳态计算模型,如美国的FHWA公路交通噪声预测模型(Rochat和Fleming,2002)、英国的CRTN模型(交通部和威尔士办事处英国,1988)、德国的RLS90模型(联邦公路建设部,1988)。该模型可用于预测一段时间内的平均交通噪声。研究人员在交通噪声预测方面做了大量的工作,并建立了各种有影响力的稳态计算模型,如美国的FHWA公路交通噪声预测模型(Rochat和Fleming,2002)、英国的CRTN模型(交通部和威尔士办事处英国,1988。2010年)和欧洲的CNOSSOS模式(Kephalopoulos等人,2012年)。此外,交叉口(Makarewicz等人,1999;Makarewicz和Kokowski,2007;Abo-Qudais和Alhiary,2007)和环形交叉口(To和Chan,2000;Covaciu等人,2015)的一些特定模型也属于稳态计算模型范畴。虽然上述模型都能预测给定时间段内的等效噪声水平Leq或时间平均噪声水平Lat,但它们不能计算噪声的动态变化。
动态模拟模型不仅可以用来预测一段时间内的噪声水平Leq,还可以预测噪声水平的每秒动态变化(Jacobs等人,1980;Chvallier等人,2009;Guarnaccia,2013)。该方法通常通过组合动态交通仿真模型、车辆噪声发射模型和声音传播模型来实现(CAN等人,2010;Luo等人,2012)。随着计算机技术的发展,动态仿真模型在交通噪声预测中的应用越来越广泛。例如,铃木等人,提出了一个大型交叉口动态交通噪声仿真模型(Suzuki et al.,2003)。Chvallier等人,开发了一种新的环形交叉口交通模拟工具,并将其与噪声发射规律和声传播模型相结合来研究环形交叉口附近的动态噪声(Chvallier等人,2009年)。Li等人,建立了建筑物间信号交叉口的动态模型,并研究了红绿灯对交通噪声的影响(Li等,2011)。蔡等人,利用动态仿真模型模拟了信号控制的人行过街路口附近的动态变化,并研究了其交通噪声特性(蔡等,2011)。然而,几乎所有的动态仿真模型都依赖于复杂的交通仿真模型。此外,动力学仿真模型中几乎所有的车辆噪声排放模型都是与车速和车型相关的固定代数表达式,这使得很难表示实际情况下的各种噪声排放。
蒙特卡罗方法是一种依靠重复随机抽样获得数值结果的计算算法。它可以用来解决任何具有概率解释的问题(Kroese等人,2014年)。在交通工程中,它已被应用于交通速度预测(Jeon and Hong,2016)、交通流仿真(Waldeer,2003)和基于车速分布的交通噪声仿真(Alberto and Efraiacute;n,2013;Iannone et al.,2013)。为了简化微观交通流模拟过程,保持预测参数的多样性和准确性,提出了一种基于车辆噪声排放概率分布模型并通过蒙特卡罗模拟实现的交通噪声预测新方法。首先通过实验的方法得到了三种车型噪声排放的概率分布,然后在此基础上建立了自由流道路和控制流道路交通噪声预测的概率模型,最后用实测数据验证了模型的准确性。
2.模型建立
2.1自由流道路模型
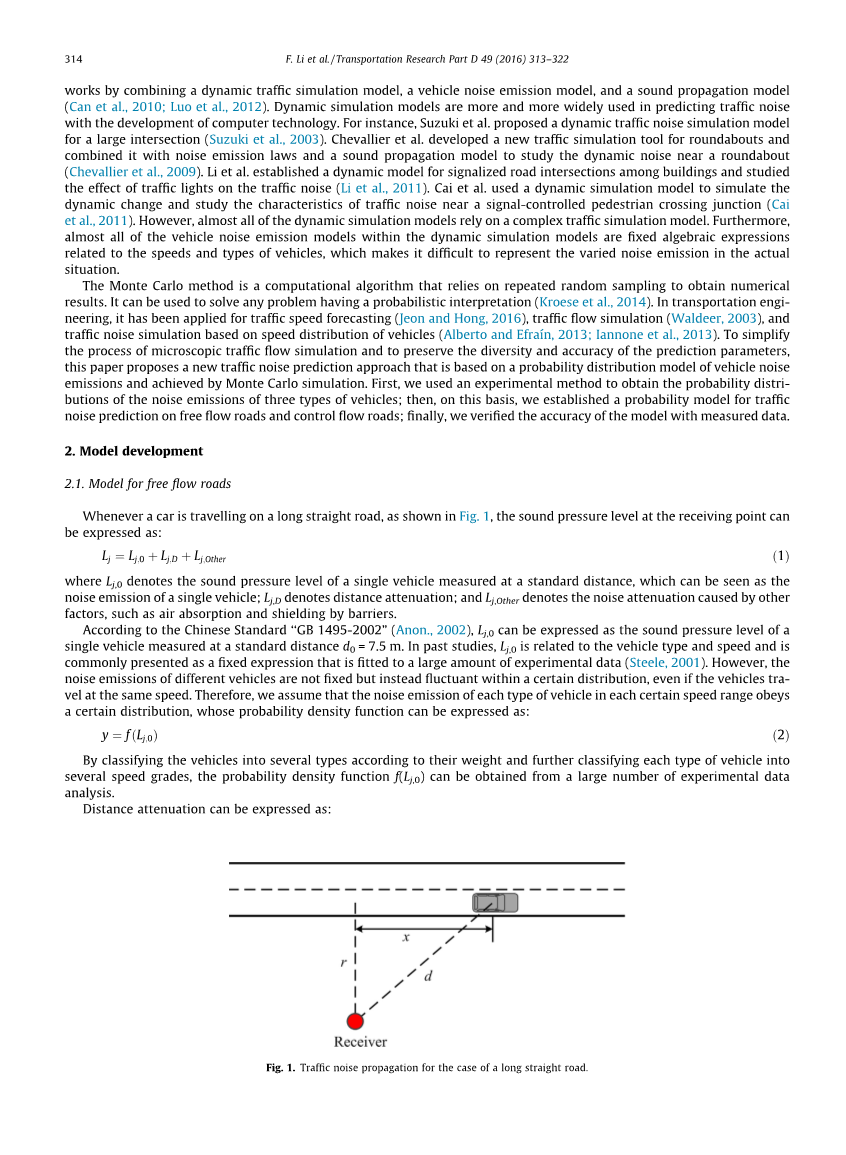
如图1所示,每当汽车在一条长而直的道路上行驶时,接收点的声压级可以表示为:
(1)
其中,表示在标准距离上测量的单个车辆的声压级,可视为单个车辆的噪声排放;表示距离衰减;表示其他因素(如空气吸收和障碍物屏蔽)引起的噪声衰减。
图1.长直路情况下的交通噪声传播
根据国家标准“GB1495-2002”(无名氏,2002),Lj,0可以表示为在标准距离d0=7.5m处测得的单个车辆的声压级,在以往的研究中,Lj,0与车辆的类型和速度有关,通常是一个固定的表达式,适用于大量的实验数据(Steele,2001)。然而,不同车辆的噪声排放并不是固定的,而是在一定的分布范围内波动的,即使车辆以相同的速度行驶。因此,我们假设每种车型在每个速度范围内的噪声排放服从一定的分布,其概率密度函数可以表示为:
(2)
通过根据车辆的重量将车辆分类为几种类型,并将每种类型的车辆进一步分类为几个速度等级,可以从大量的实验数据分析中获得概率密度函数f(Lj.0)。
距离衰减可以表示为:
(3)
其中d0表示测量单个车辆的噪声时的参考距离,在中国标准“GB 1495-2002”(Anon,2002)中取为7.5米;d表示车辆到接收点的距离,取决于车辆在道路上的坐标(用x表示)和从接收点到道路的垂直距离(用r表示)。假设影响接收点的道路长度为l(以米为单位),则x在l的范围内服从均匀分布,其概率密度函数为:
(4)
为排除研究路段外车辆的影响,建议接收点与路段的视角大于150°。在该模型中,l的取值为400m。
将道路上的车流分为两个方向,然后将方向1内所有车辆的声功率相加,即可计算出方向1在任意时刻产生的噪声:
(5)
其中m表示道路上的车辆数量。在直道上自由流动的情况下,m服从泊松分布(Roess等人,2010),其概率密度函数可写为:
(6)
式中,k是道路上的平均车辆数,与每小时交通量Q和速度V(以米/秒为单位)有关:
(7)
可以使用相同的方法计算方向2在任意秒(Li.2)产生的噪声。然后,将两个方向的声功率相加,即可得到瞬时声级:
(8)
2.2 可控流量道路模型
图2.控制流量交通车道和时间-空间图的示意图
对于流量控制的道路,我们用停车线将车道分成两段,L1和L2(以米为单位)。同样,为了保证接收点对路段的视角大于150°,建议L1和L2为200m。车辆在红绿灯控制下的行驶过程如图2所示.假设交通灯的信号周期为T,则红灯时间和绿灯时间分别为Tr和Tg,t表示从红灯亮起的信号周期的第T秒。因此,t在(0,T)范围内服从均匀分布。在任何时期的第T秒,我们都有:
当红灯亮时,l1号以内的车辆正在排队等待放行。在交通不拥堵的情况下,时刻m1.r的排队车辆数与小时交通量Q和t相关,服从泊松分布,。车辆到停车线的距离LX1在范围内服从均匀分布。其中ls表示平均空间间隔。此时,在最后一个绿灯时间内释放的队列的头部车辆已经行驶了TG t秒,尾部车辆已经行驶了t秒。因此,在l2以内的车辆数量m2.R变成了:
(9)
其中,ht(以s/veh为单位)表示交通流的平均时间间隔,即排队的两个连续车辆之间的时间间隔;V(以m/s为单位)表示离开交通流的平均速度;以及L2/V表示车辆离开L2所需的时间。类似地,lx2在(Vt,l2)范围内服从均匀分布。
当交通灯为绿色时,排队被释放,车辆数量M1.G可通过下式计算:
(10)
其中m1,T服从泊松分布,lx1在(-m1.G*ls)范围内服从均匀分布。目前l2辆以内的车辆数m2.g分两种情况考虑:当t - TRlt; l2/V时,本次绿灯时段放行的车辆全部在L2;当时,在当前绿灯时间内放行的部分车辆已离开L2.因此,我们有:
(11)
类似地,lx2在范围内服从均匀分布.
均匀分布(9)-(11)给出任意时刻上路车辆数量的计算方法。在此基础上,可以通过参考均匀分布来计算受控流动道路产生的瞬时声级(1)、(3)、(5)及(8)。
2.3 单车噪声排放的测定
采用实验方法获得了单车的噪声排放LJ.0。实验方案按照国家标准GB1495-2002(加速行驶车辆外部噪声限值及相关测量方法)(无名,2002)和GB 1496-79(单车交通噪声测量方法)(无名,1979)设置。选择一条低交通量、100m左右、无明显反光层的平直道路。声级计设置在离地面1.2米和距离道路两侧车道7.5米的地方。车辆分为三类:长度在6米以下、重量在2吨以下的轻型车辆;长度在10米以上或重量在12吨以上的重型车辆;以及中型车辆,即轻型车辆或重型车辆以外的任何车辆。共测量了3300辆汽车(包括2429辆轻型汽车、354辆中型汽车和517辆重型汽车)通过声级计时的噪声排放量。每辆车的速度都由雷达速度指示器记录下来。
车辆速度分为三个等级:低速(0~20 km/h)、中速(20~50 km/h)和高速(50 km/h以上)。利用SPSS软件,采用Kolmogorov-Smirnov法和Shapiro-Wilk法对各车型在各车速等级下的噪声排放进行正态检验,如表1所示。假设每组噪声排放数据服从正态分布。正态检验结果表明,各组噪声发射数据的显著性水平均大于0.05,说明不能反驳假设.虽然有几组数据的显著性水平相对较低(如低速重型车辆和高速中型车辆),但我们仍然认为假设是正确的,数据近似服从正态分布.在统计分析的基础上,得到了三种车型在三种车速等级下噪声水平的平均值和标准偏差(图3)。因此,公式(2)(lj.0的概率密度函数)可以表示为:
(12)
表1 车辆噪声排放数据的正态性检验
2.4 模型的计算步骤
2.4.1 自由流动道路
可以通过以下步骤使用蒙特卡罗方法模拟任意给定时刻的交通噪声.
步骤1:生成表示车辆数量的随机数m,并根据公式服从泊松分布(6)。
步骤2:根据每个参数的概率分布,随机生成m组车辆参数(代表m辆车,如车辆类型、坐标、速度等)
步骤3:重复第一步和第二步,生成反向行驶车辆的参数
步骤4:根据步骤2生成的车速和第2.3节给出的噪声排放模型,随机生成每辆车的噪声排放。然后,计算每辆车在接收点产生的噪声水平,这通常需要使用公式计算距离衰减。(3)其他因素引起的噪声衰减。最后,将所有车辆的噪声功率相加,得到给定时刻的噪声级
步骤5:将上述计算重复N次,得到N个瞬时噪声级
步骤6:基于这些瞬时噪声级计算等效连续声级Leq、统计声级L10、L50和L90以及一段时间内交通噪声的概率分布
图3.车辆噪音排放量的统计结果
2.4.2 控制流道路
控制流道路的计算步骤与自由流道路的计算
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[241275],资料为PDF文档或Word文档,PDF文档可免费转换为Word



