集装箱船舶波浪在弗里曼港运动的全尺寸测量与方法验证外文翻译资料
2021-12-23 22:43:53
英语原文共 24 页
集装箱船舶波浪在弗里曼港运动的全尺寸测量与方法验证
摘要:本文对港口航道中船舶波浪诱导运动的数值模型进行了验证。从最近的全面试验中挑选出一组高质量的数据。 集装箱船在进入和离开西澳大利亚弗里曼港的垂直运动中使用。六例测量波浪引起的升沉、滚转和俯仰运动 文中详细讨论了NER船的通过情况,并对现场波浪测量和波谱分析进行了描述。在计算机编码 OCTOPUS中实现了一种线性条形方法,用于预测船舶的波浪运动。对实测的船舶运动响应与预测的船舶运动响应进行了比较,验证了船舶运动软件的正确性,并对实测的船舶横摇响应进行了分析。 用于全面评估现有减振方法的适用性。结果表明,该方法能较好地预测垂荡、滚转和俯仰响应,并具有合理的精度。 在本试验的一些案例中,观察到了大幅度长周期滚动运动,而在其他情况下,也观察到了意想不到的谐波俯仰运动。 我们建议作进一步的研究,以研究这些看似非线性的效应。
关键词:波浪诱导运动.船舶龙骨下隙(UKC);接近航道;浅水;集装箱船
引言
优化船舶下龙骨间隙(UKC)对港口安全高效运行具有重要意义。更好地了解船舶UKC有助于降低成本、尽量减少疏浚工程所固有的环境影响、船舶通过搁浅的安全以及经济上的安全。 打捞作业,充分利用船舶在进港航道上的载客量。特别是,船舶的动态垂直运动(即船下、横倾和波浪引起的运动)是影响UKC要求的重要因素。为了更好地预测蹲效应,已经采取了各种方法,例如模型规模试验(Lataire等人)。(2012年)和全面测试(Ha等人)。2016年)散货船和型号- Cale试验(Mucha等人)对集装箱船进行全面测试(Uliczka和Kondziella,2006年;Gourlay,2008年)。关于计算转弯和风引起的横倾力矩,存在着标准方法(PIANC,2014年)。对于波致运动,波致升沉、俯仰和滚转运动有潜在的作用。 在最大幅度减少的船舶UKC,其中一个港口是直接向海洋和它的接近通道暴露在长周期的膨胀。然而,对船舶波浪运动的研究却很少, 端口通道已经完成。散货船的模型规模试验由Van Wyk和Zwamborne(1988年)进行,全面试验由Wang(1980)和Van Wyk(1982)进行。对于集装箱船,布里格斯等人进行了数值模拟。(2014年),由Wang(1980)和Briggs等人进行了全面测试。(2013年)。
船舶波致运动是模型中最复杂的UKC效应,这部分是由于分析的复杂性,也部分是由于船舶尺寸、维等众多变量的影响。 平差分布、航向和速度;水深;波浪相关参数(波高、周期、方向和传播)(PIANC,2014年)。因此,获得可靠的船舶垂直运动数据集,结合现场波浪测量资料,对确定船舶的波浪运动,特别是在港口航道的全尺度运动,具有重要的意义。
成功地在弗里曼港进港通道进行了一系列集装箱船运动的全面试验,获得了一组关于船舶垂直运动和原位运动的高质量数据。 定向波测量已经确定。本文利用该数据集对集装箱船在进港通道中的波浪运动进行了方法验证,并给出了一些有意义的结论。 讨论了可利用的结果。由于在具有全面高质量数据的港口航道中,船舶波致运动的有效性以前似乎还没有公布过,因此可能会有以下结果: 有助于开发港口的UKC管理。
集装箱船舶运动的全尺度测量
2016年4月,在弗里曼港对16艘集装箱运输船进行了全面的测量,包括7艘进港和9艘出港过境,通过其深水通道入口通道。 ,以及内港(见图AUS 112和113)。测量采用基于海岸的接收机方法,该方法使用高精度的全球导航卫星系统(GNSS)接收机和一个固定的基站作为外部参考。Ha和Gourlay(2018)描述了全面测量和岸基接收方法的一般过程。来自试验的原始数据已作为海洋科学和技术中心(CMST)的报告(Ha和Gourlay 2016)发布。
港口、航道及被测船舶航迹的描述
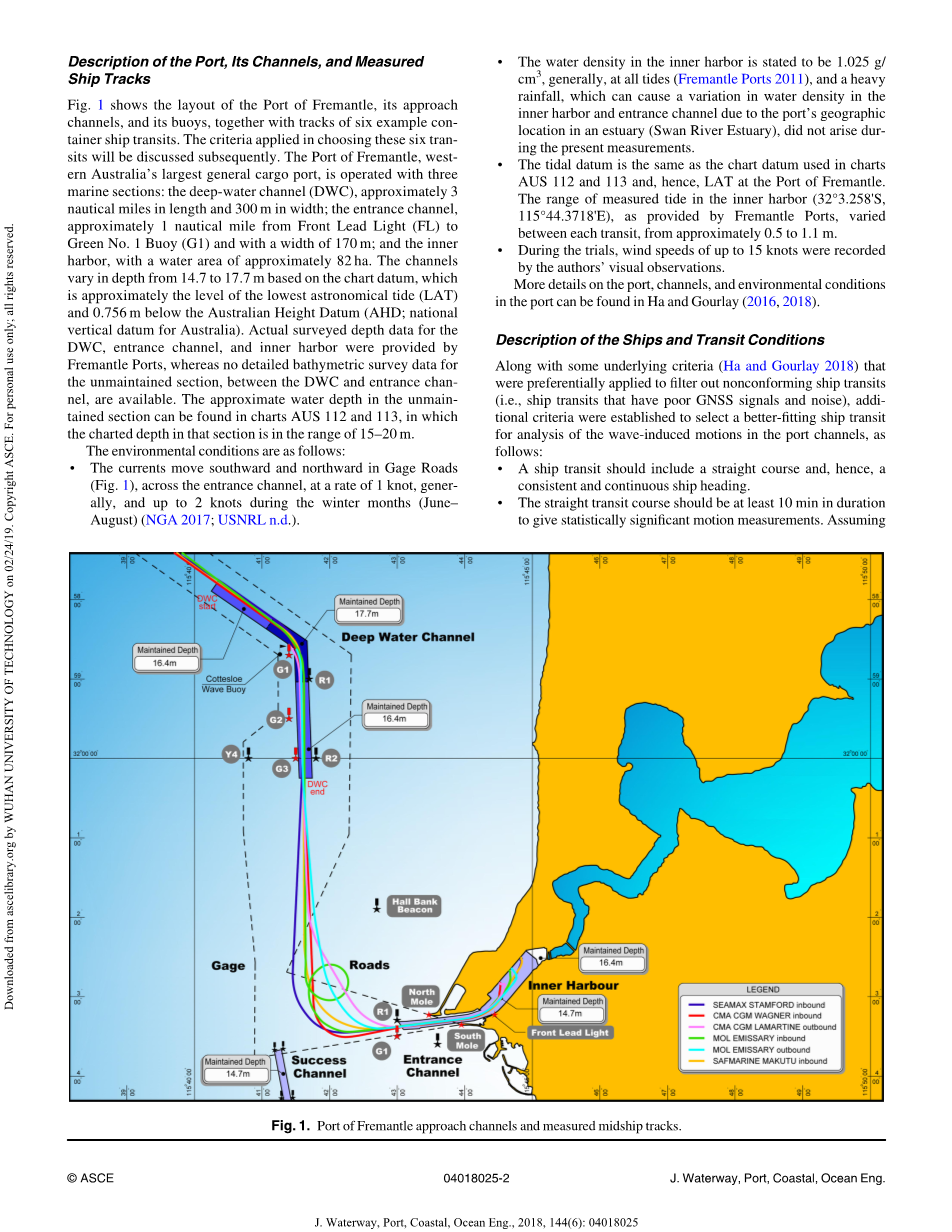
图1 展示了弗里曼港的布局、进港通道和浮标,以及六个集装箱船过境的航迹。随后将讨论选择这六个过境点的标准。弗里曼港是澳大利亚西部最大的普通货物港,有三个海运部门: 深水航道(Dwc),长约3海里,宽约300米;入口航道,距前导灯(FL)至绿色1号浮标(G1)约1海里, 宽度170米;和内港,水域约为82公顷。根据图表数据,通道深度从14.7到17.7m变化,这大约是低的水平。 天文潮汐(LAT)和澳大利亚高度基准以下0.756米(AHD;澳大利亚的国家垂直基准。DWC、入口通道和内港的实际勘测深度数据由Fremanman港提供,而DWC之间未维护的剖面没有详细的水深测量数据。 和入口通道。未维护部分中的近似水深可在图表AUS112和113中找到,其中该区段的绘制深度在15-20的范围内。
环境状况如下:
·海流在盖奇路(图1)向南和北移动,穿过入口通道,通常以1节的速度移动,在冬季月份(6月至8月)高达2节(NGA 2017;U (SNRL N.D.)
·内港的水密度一般为1.025 g/cm3,在所有潮汐中都是如此(Fremanmanport,2011年),以及一场暴雨,这会导致内港的水密度发生变化。 由于港口的地理位置在河口(Swan河河口),港口和入口航道不会出现在本测量过程中
·潮汐基准与AUS 112和113海图中使用的海图基准相同,因此在弗里曼港使用的是LAT。港内(南纬32°3.258lsquo;,东经115°44.3718rsquo;)测潮范围由弗里曼港提供,在每一过境点之间变化,约为0.5至1.1米。
·在试验期间,作者的视觉观察记录了高达15节的风速
关于港口、通道和环境状况的更多细节见Ha和Gourlay(2016、2018)。
船舶和过境条件说明
以及一些基本标准(Ha和Gourlay 2018),这些标准优先用于过滤不合格的船舶通过(即具有较差的全球导航卫星系统信号和噪声的船舶转运), 为选择更适合的船舶过境点,制定了国际标准,以分析港口航道中的波浪引起的运动,具体如下:
·船舶过境应包括直航,因此应包括一致和连续的船舶航向。
·直线运输路线应至少持续10分钟,以便进行统计意义上的运动测量
·假设单个波浪的周期为10或15秒,船舶在10分钟内可能会经历大约40-60次影响船舶运动的波浪。
图1.弗里曼港进场通道和被测船中航迹
在这些标准的基础上,选择了6艘集装箱船的横渡来分析波浪引起的运动,如表1所示。在这里,详细介绍了莫尔使者为其两个过境。 排水量和方形系数(Cb)是夏季吃水的值,而方形系数(Cb)是排水体积与垂线间长times;船宽times;吃水的比值。
对于船舶运动验证,船舶的静液压数据'实际过境吃水是从船上获得的'修剪和稳定性书籍。从装载计划中发现横向GMf数据GMF是中间中心高度,校正为自由表面效应.所有集装箱船过境情况的比较详情见表2。注意,方形系数(CB)是基于到达或离开时的平均吃水来计算的。日期和时间在澳大利亚西部标准时间(AWST)。
通过应用具体的标准,选择了六个例子过渡与他们确定的直道,如图2所示。不同的装载条件,不断变化的环境条件,不同飞行员的不同引航技术可能会导致不同的通道显示进入入口通道的不同路径(见图1),从而导致不同的长度和航向。表3显示了直线课程本身的详细信息。从北线(0°)沿顺时针方向测量船舶航向
直线路径涉及未维护部分(DWC和入口通道之间);参见图1和2)。如前面所提到的,剖面中的绘制深度范围为约15至20米。根据水深(H)与船舶吃水(T)之比(PIANC 2014),认为集装箱船在浅水条件下可能曾在DWC中航行(h/Tlt;1.5)。通常在浅水条件下(H/Tlt;1.5),但有时在中等水条件下(1.5lt;H/Tlt;2.0)。船舶水深”未维护部分的轨道估计在17-18m的范围内。然后将这些深度与DWC16.4m的水深进行平均以给出一致的深度,以便定义有效水深仅包含一个值用于船舶波浪诱导运动的建模。平均水深还包括局部潮汐效应(表3)。
波浪测量与分析
由于研究船舶在波浪中运动的前提是对海况的了解,因此识别波浪特征在处理船舶波浪运动中具有重要的应用价值。在演出期间在试验中,使用数据井(HAARLEM,荷兰)定向的Waverder浮标测量波浪,并使用全测量的波时间序列数据进行波谱分析。
现场波测量的描述
来自CotteSloe波浪浮标的波浪数据是由来自澳大利亚西部运输部(WADOT)的沿海基础设施小组的协作提供的。浮标位于31°58处。东经74333lsquo;南部115°41.39833rsquo;,海图基准面深度16-17m,靠近绿1号浮标(G1)。1和2)。浮标以1.28的速率测量原始的北、西和垂直位移。使用W@ves21软件读取和后处理原始数据,该软件是浮标制造商开发的数据采集和数据处理软件(Datwell Bv 2014 B)。
表1.集装箱船详情
图2
虽然科特斯洛波浮标与用于分析的运输段直接相邻,但它可能无法准确地表示整个中转段的波浪状况。然而,沿中转段方向波谱的变化预计将是最小的,因为这部分过境是在一个开放的区域,具有相当恒定的水深测量。
图3
此外,由于波浪条件的变化,在运输的这部分中没有注意到船舶运动的显著增加或减少。
波浪能谱分析
在W@ves21软件中,可以应用快速傅里叶变换(FFT)获得浮标的升沉谱,从而得到波功率谱密度。波的方向是由余弦和量子方向导出的。采用最大熵法(MEM)将原始数据转换为方向性波分布(即波粉)。R谱密度作为波频率和波方向的函数)。
W@ves21中的光谱处理例程被设计成每200秒一次,计算一个频率范围为0.025-0.58Hz(共64个频率)的频谱,0.025到0.1Hz(16个频率)的分辨率为0.005 Hz,以及0.01Hz
的BET分辨率。0.11和0.58Hz(48个频率)(数据阱B2014A)。需要将来自W@ves21的结果定向或非定向波频谱与其他软件的定向或非定向波频谱进行比较,以确保它们的适合能力。另外,使用内部MATLAB代码来获得使用相同波形测量数据的非定向波频谱。内部MATLAB代码使用Bartlett窗口,具有半赢球DOW重叠(Pressetal.1992),并且每个片段中的点数被选择为256个点。
在集装箱船通过过程中测量到的无方向和定向波谱如图3所示。根据浮标手册(dwr-mkiii),浮标可以测量波浪高度。1.6和30s之间的周期,精度为测量值的0.5%(数据阱B2014A),这意味着浮标不能有效地测量由于其惰性而具有超过30s的周期的波。铝系统容易产生低频漂移.因此,0.033赫兹的截止频率(或30秒的截止周期)可视为测量波谱的下限(Jeans等人)。二百3;Lenin和Melville2014)。测量波数据的时间周期对应于每个直线的时间段,特别是对波浪中对船舶运动有较大影响的浪涌部分,使用W@ves21软件的结果进行进一步分析可能没有任何障碍。在图3中,在Fremover方法通道的端口中,波谱表现出明显的海洋与膨胀部分之间的区别。通常,每个渡越的峰值波频率在0.05A之间。Nd 0.1Hz,峰值周期10~20s,主波方向为225°(西南)~315°(西北)。CMA、CGM、Wagner、MOL大使的波谱TBIND和SafMarine Makutu对总波能的贡献相对较大。表4总结了由波谱导出的重要波浪参数,其中Hs=显著波高;tp=谱峰周期;T01=平均周期;t02=平均过零周期。海潮分离频率为0.125 Hz(或周期为8s)。
波浪引起的船舶垂直运动:升沉、横摇和纵摇响应
船舶在具有波浪的港口进近航道中的总体垂直运动被认为是其起伏、滚转和俯仰运动的组合。了解帖的复杂混合物在给定的环境条件下,应分别对船舶的每一运动进行调查和分析。频谱分析用于产生船舶的垂直运动。频率域和因此它的升沉、滚动和俯仰运动响应谱。将测量的运动响应谱与来自方法验证的预测结果进行比较。
资料处理
使用Javad(加利福尼亚州圣何塞)的胜利-1和胜利-2全球导航卫星系统接收机在船首和桥翼上测量了船舶的运动,并在岸上安装了一个固定的全球导航卫星系统基站。假设船舶为r从实测数据可以得到所有六自由度船舶的绝对运动。该方法在Ha和Gourlay(2018年)中作了详细说明,包括以下步骤:
·每艘船的前垂直(FP)、船尾垂直(AP)和左舷和右舷舱底角的下沉量是通过计算每个接收机的原始全球导航卫星系统(GNSS)结果得出的
·然后,假设船舶是刚性的,并比较相对于静态浮动位置的纵倾和横倾角度,计算动态下沉(在船中部)、纵倾和横倾。
·采用低通滤波器消除近稳态部件(例如,由于风和转弯引起的蹲足和后跟)的影响,可导出纯波引起的升沉、滚转和俯仰运动。
图4示出了用于示例传输的这样的处理(SEAMAX斯坦福德入站)。结果与前引线灯(FL)的累积距离(32°3.22728lsquo;S,115°44.45048rsquo;E)相对应。垂直绿色1号浮标(G1)、绿色2号浮标(G2)、绿色3号浮标(G3)和DWC的终点分别为起点线、绿色1号浮标(G1)、绿色2号浮标(G2)、绿色3号浮标(G3)和终点线。在入口通道,垂直线显示在G1,Nort。h Mole(NM)和South Mole(SM)(参见图1)(Ha和Gourlay 2018)。还显示了直线在整个运输过程中的位置。对于图4(A),下沉是在FP,AP,和左舷舱底角(正向下)。航速是e根据全球导航卫星系统的结果,船舶在地面上的航速(SOG),但不能与测量结果分开测量船舶通过水的速度(STW)。如前所述,海流在盖奇公路(图1)向南移动和向北移动的时间分别约为14和10小时,速度一般为1节,而在不稳定的w区则高达2节。冬季月份的皮革(NGA 2017;USNRL N.D.);因此,船舶的STW可能被认为在船舶SOG的61节之内。
资料编号:[3765]



