利用三维激光图像扫描系统监测边坡变形:案例研究外文翻译资料
2023-01-01 19:11:40
本科毕业设计(论文)
外文翻译
利用三维激光图像扫描系统监测边坡变形:案例研究
作者:岳德鹏,王继平,周锦兴,陈晓雪,任慧君,
国籍:中国
出处: Mining Science and Technology (China)Volume 20, Issue 6November 2010 Pages 898-903
摘要:采用ILRIS-36D三维激光图像扫描系统对山西平朔安家岭露天矿边坡进行了监测。阐述了该系统的基本工作原理、性能指标、特点及数据采集和处理方法。对点云结果进行了详细的分析。采用缩放范围分析法分析了边坡的变形特征。结果表明,边坡位移趋势稳定,滑坡危险性较低。研究结果表明,三维激光图像扫描能够提供长距离多参数、高精度的实时数据。利用这些数据可以快速、准确地研究边坡的变形。
关键词:三维激光图像扫描系统;ILRIS-36D;失真;边坡;监控
1介绍
人口的增长和中国的快速发展和现代化对矿产资源的需求越来越大。矿山作业规模不断扩大,大型矿山工程项目不断推出。这些努力给人民带来了巨大的经济利益,但也带来了许多问题。边坡变形问题尤为重要。了解如何监测边坡变形和稳定性对于预防地质灾害和促进矿区环境负责任和可持续的发展是重要的。早期对边坡变形的预测与监测研究主要依靠现象学预测和经验模型。这种方法导致低精度的模拟和预测。随着计算机技术的发展,一些现代数学理论,如数值模拟、模糊数学或灰色系统理论,可以被引入到目前的边坡稳定性研究中。这个更新的研究促进了边坡变形理论的发展,提高了管理效率和决策水平。近年来,开发了多种监测边坡变形的新技术。其中,全球定位系统(GPS)、全站仪测量技术和数字摄影测量技术得到了广泛的应用。然而,所有这些都有局限性。一种新的测量技术--三维激光扫描,由于其高精度和高速度,超越了传统的单点测量方法,最近在采矿行业流行起来。该技术对综合、综合、连续、关联的全景坐标数据进行高精度捕获。它还真实地描述了对象的框架和配置。因此,结果估计比其他方法更接近于这种技术的实际情况。本文以山西省平朔安家岭露天矿为研究对象。采用缩放距离分析方法和三维激光图像扫描系统获取边坡数据。据此可以分析边坡的特征位移。研究结果对矿山安全生产具有重要意义,也为矿山企业周围边坡变形研究提供了新的思路。
2研究区
安家岭露天矿位于平朔矿区中南部。地形为缓坡丘陵,海拔1100 - 1500米。矿区属于温带大陆性季风气候区。年降水量在400 - 500毫米之间。然而,不同季节的降水量差别很大。夏季降水量占全年降水量的60%以上。径流的损失约为30%,这导致了地下水的严重短缺。由于自然条件和煤矿开采技术的限制,大型露天开采不仅影响露天矿边坡的稳定性,而且在露天矿边坡变形预测精度不高的情况下诱发边坡滑坡。
3原理与方法
3.1三维激光图像扫描系统原理
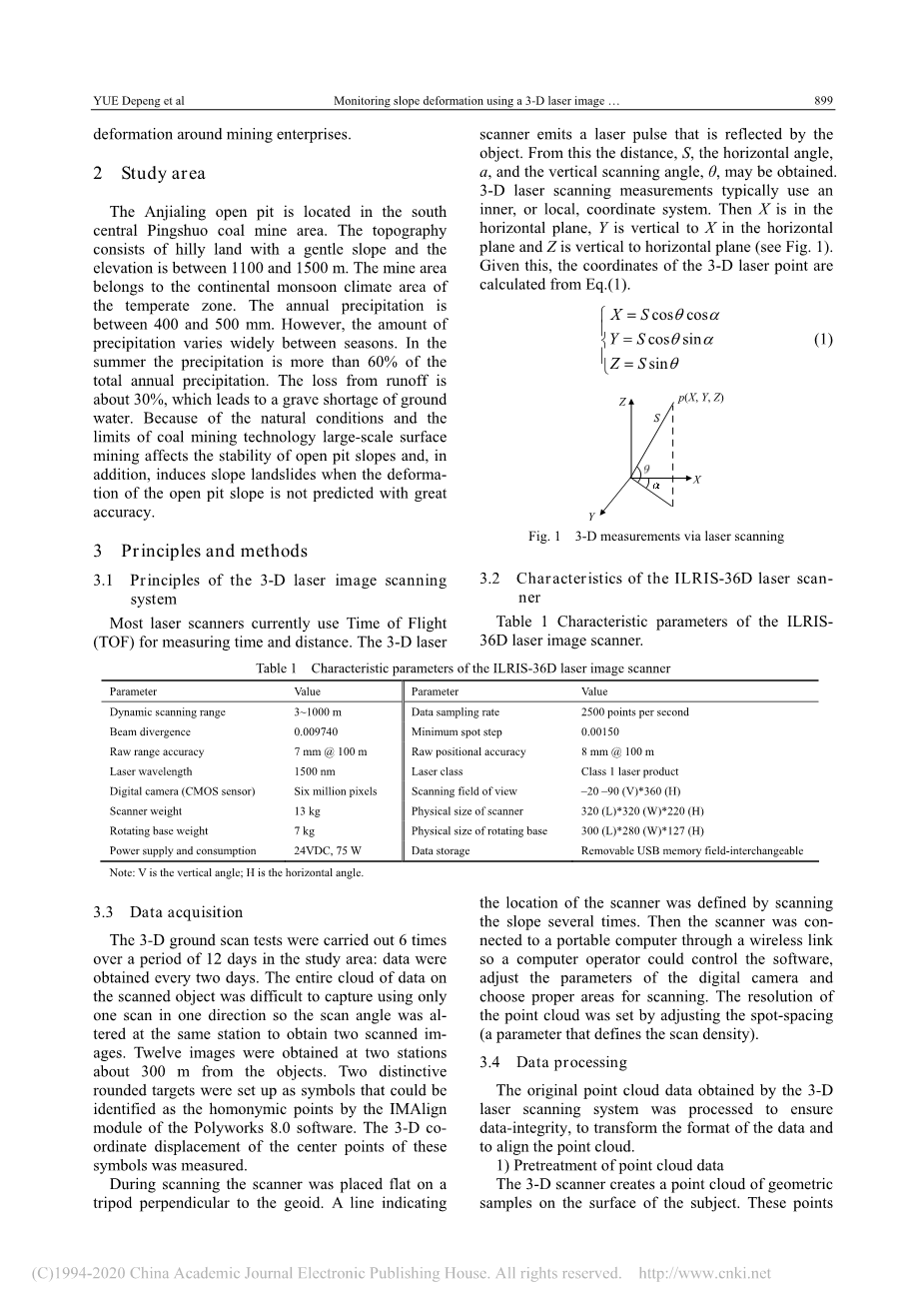
目前大多数激光扫描仪使用飞行时间(TOF)来测量时间和距离。三维激光扫描仪发射的激光脉冲被物体反射。从这个距离S,水平角,a,和垂直扫描角theta;,可能获得的。三维激光扫描测量通常使用内部或局部坐标系。则X在水平面上,Y在水平面上与X垂直,Z在水平面上与X垂直(见图1),由式(1)计算出三维激光点的坐标。
图 1 三维激光扫描测量
3.2 ILRIS-36D激光扫描仪的特点
|
参数 |
价值 |
参数 |
价值 |
|
动态扫描范围 |
3 ~ 1000 |
数据采样率 |
每秒2500点 |
|
光束发散度 |
0.009740 |
最小点的步骤 |
0.00150 |
|
生的精度范围 |
7mm@ 100米 |
生的位置精度 |
8mm@ 100米 |
|
激光波长 |
1500 nm |
激光类 |
第一类激光产品 |
|
数码相机(CMOS传感器) |
六百万像素 |
扫描视场 |
-20-90 (V)*360 (H) |
|
扫描仪的重量 |
13kg |
扫描器的物理尺寸 |
320(L)*320(W)*220 (H) |
|
旋转底座重量 |
7kg |
旋转底座的物理尺寸 |
300(L)*280(W)*127 (H) |
|
电力供应及消耗 |
24 vdc, 75 W |
数据存储 |
可移动USB存储器外地可互换 |
表 1 ILRIS- 36D激光图像扫描仪的特征参数。
3.3数据采集
研究区在12天的时间内进行了6次三维地面扫描试验:每两天获取一次数据。扫描对象上的整个数据云很难只用一个方向的一次扫描来捕获,因此在同一位置改变扫描角度来获得两幅扫描图像。在距离目标约300米的两个站点上获得了12张图像。在Polyworks 8.0软件的IMAlign模块中,设置了两个不同的圆形目标作为符号,这些符号可以被识别为同名点。测量了这些符号中心点的三维坐标位移。
在扫描过程中,扫描仪被平放在一个与大地水准面垂直的三脚架上。一行显示扫描器的位置是通过多次扫描斜坡来确定的。然后扫描仪通过无线连接连接到便携式电脑,这样电脑操作员就可以控制软件,调整数码相机的参数,并选择合适的扫描区域。点云的分辨率是通过调整点间距(一个定义扫描密度的参数)来设置的。
3.4数据处理
对三维激光扫描系统得到的原始点云数据进行处理,保证数据的完整性,转换数据格式,对点云进行对齐。
1)点云数据预处理
3-D扫描仪在被测物的表面产生一个几何样本点云。这些点用于推断主题的形状。如果在每个点上收集了颜色信息,也就记录了被测物的颜色。彩色数据由数码相机采集。使用Paser软件将点云数据转换为Polyworks的标准格式。导出过程创建一个PIF文件和一个XYZ文件。
本实验在研究区进行了12天,每隔一天获取一个点云。在扫描过程中,扫描仪的位置是固定的。在本实验中,每个实验以两个不同的角度获得两幅扫描图像,在这两幅图像之间至少有20%的重叠。
预处理后,数据进入Polyworks的IMAlign模块进行粗对准(图2和图3),如图2所示,红色的点表示同名点。
图 2 在IMAlign模块中对两个扫描映射进行对齐
图 3 对齐后的结果
2)确定符号的三维坐标
由于扫描数据由许多点组成,因此必须考虑扫描中对应点的精确标识问题。在多边形图像的对齐过程中,符号不能只看作是同形点。符号也反映了位移的趋势。本实验以两个圆形目标作为软件处理的符号,将三维模型导出到Polyworks的IMSpect模块中。这是用来搜索斜率上的圆形符号的。从图4可以看出,点云中的一块圆形区域可能被软件表示为小球。取小球的中心坐标作为符号的三维坐标。
图 4 第一个目标点云数据
3.5 R/S分析方法
R/S分析最初是由Hurst提出的,他试图评估一个永不溢水或干涸的最佳河流水库的大小R。S表示数据的标准方差。R/S分析(或重新标度范围统计分析)的基本思想是改变时间步长,研究不同时间的记录或一系列不同时间的观察。它的目的是提供一种评估,即一系列变化的表观可变性如何随所考虑的时间周期的长度而变化。本文采用赫斯特指数h表示定量信息,采用R/S方法分析了边坡的变形特性。
第一个问题是在分析边坡变形时选择时间窗。为了平滑小样本问题产生的趋势,通常采用测试观察期作为基本时间窗。本研究以一天为基本时间窗。学习一段时间,tau;,如果是用来代表观察时间我们将得到N记录。在这里, , ,的N′坐标参考点。平均数,,标准差,S,被发现在以下方式。
步骤1:选择时间窗口
步骤2:累计偏差,当
步骤3:参考点位移时间序列分析的范围
步骤4:运用赫斯特经验公式
现在决定了无因次系数的函数是范围,这是之间的差异最小和最大位移的参考点, 是坐标的标准差 ,从公式6通过最小二乘拟合确定赫斯特指数H。
随着时间的推移,对斜坡进行了大量的测量。将时间序列划分为多个分段,计算各点的位移赫斯特指数。如果某一段时间内位移的H与其它点相比有明显的不同,则边坡是不稳定的。因此,参考点的位移变化有助于预测边坡的稳定状态。
4结果与讨论
4.1基于三维激光扫描系统的分析
从图5可以看出,研究区总体趋势比较稳定,最大位移仅在厘米左右。变形按位移排序,红色是最大的。依次为黄色、绿色、蓝色和淡蓝色区域。红色区域靠近河岸,位置较高,坡度较大,位移速度较快。蓝色区域位于一个平坦的区域,随着时间的推移几乎没有位移。三维激光扫描系统显示:1)运动方向一般与边坡结构面垂直;2)沉降位移大于水平位移3)位移符合蠕变机理。在三维激光扫描过程中,由于彩色图像的对齐和叠加仍存在一定的缺陷,彩色信息的采集和处理还需要进一步的研究。但是,总的来说,这种方法是一种很好的非接触测量方法,不需要事先埋入检测设备。这种方法的高效性使我们能够观察到整个失真的趋势。与传统方法相比,该方法精度稍低,更适合于大型边坡的检测。
图 5 畸变监测图
4.2 基于R/S方法进行分析验证
表 2
|
Measurement |
第一点的三维坐标 |
第二点的三维坐标 |
||||
|
x |
y |
z |
x |
y |
z |
|
|
第一次 |
0.244320 |
197.820131 |
0.617536 |
–40.516505 |
179.694191 |
6.622411 |
|
第二次 |
0.247686 |
197.793516 |
0.596409 |
–40.488537 |
179.684415 |
6.594134 |
|
第三次 |
0.257830 |
197.774688 |
0.588517 |
–40.477337 |
179.658918 |
6.586473 |
|
第四次 |
0.272117 |
197.769610 |
0.577393 |
–40.472466 |
179.655304 剩余内容已隐藏,支付完成后下载完整资料
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料 资料编号:[268548],资料为PDF文档或Word文档,PDF文档可免费转换为Word |
|