评估GSICS SEVIRI-IASI交叉定标产品的不确定度外文翻译资料
2022-11-11 14:59:24
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
评估GSICS SEVIRI-IASI交叉定标产品的不确定度
Tim J. Hewison, Senior Member, IEEE
摘要:全球空间定标系统(GSICS)产品来校正Meteosat/SEVIRI(旋转增强型可见光和红外成像仪)地球静止成像仪红外通道与Metop/IASI(红外大气探测干涉仪)作为参考仪器的匹配观测结果进行比较的定标。根据测量不确定度表达指南,分析交叉定标算法的每个步骤以产生全面的误差预算。本文旨在通过GSICS校正验证作为不确定度估计提供的质量指标。该方法提供了一个框架,允许在配置标准和生成的匹配数量之间进行定量权衡,以提供进一步的算法改进。结果表明,随机误差在系统误差中占主导地位,两者合成的校正亮温的标准不确定度(包含因子k = 1)在典型的晴空条件下为~0.01 K,而低辐射则快速增加,在冷云顶210 K场景超过一个数量级。
关键词:定标,地球观测系统,红外(IR)图像传感器,测量不确定度,气象学
1 引言
可追溯性是全球空间定标系统(GSICS)的关键原则之一[1]。确保其产品的可追溯性基于依赖于传递连续的比较链的共同参考,每个比较具有明确的不确定度。基于这个意图,本文回顾了地球静止卫星Meteosat/SEVIRI的红外通道使用极轨卫星Metop/IASI作为参考仪器的生成GSICS校正的交叉定标算法中的每一步所引入的不确定度。这些GSICS校正是将观测结果定标为与共同参考仪器一致的函数。这些是GSICS产品在GEO-LEO 红外通道定标中的示例。
在Landsat-7/ETM 和Terra/MODIS的交叉定标中,针对一些有因素提出了类似的分析,这些因素被确定为主导因素[2]。类似的方法也被用于分析MODIS红外通道的定标,通过评估星上辐亮度的不确定度的影响,并将这些不确定度合成在一个误差预算中[3]。
交叉定标算法基于选择来自GEO目标仪器和LEO参考仪器的观测结果,这些观测结果根据空间,时间和观察几何进行匹配[4~5]。将匹配的观测结果转成在空间尺度和光谱覆盖范围上具有比较性,并使用加权回归进行比较。每对匹配观测值基于其测量的空间方差和每个通道的指定辐射噪声来分配权重。回归传递这些方差以估计校正辐亮度的不确定度,提供了交叉定标产品的质量指标。
2 一般原则
在此分析中,通过算法过程的计算模型分析不确定度,如算法理论基础文档(ATBD)中所述 [6]。每个过程都被考虑,并且由于随机和系统的影响,评估它引入每对匹配辐亮度的不确定度。然后合成这些不确定度以产生误差预算,给出B类评估对交叉定标偏差的不确定度[7]。将其随机分量与来自交叉定标算法的结果的时间序列统计进行比较,由此调整交叉定标算法从而产生更一致的不确定度估计。该分析基于测量不确定度表达指南,并遵循QA4EO指南[8]。
对于交叉定标算法的每个过程,估计目标仪器和参考仪器之间的采样变量的典型差异 ——来自用于选择匹配(例如空间采样)的指定限制或来自于已知差异(例如采样时间)。这些差异在本文中称为。还估计了每个变量中的辐射对每个变量中的扰动的灵敏系数。
输入到交叉定标过程的量是每个匹配的辐射率。通常,由于过程,上的标准不确定度(包含因子)是:
GSICS校正,是目标和参考仪器观察到的匹配辐射的回归方程[4]。如ATBD中所述,在该回归中组合适用日期的窗口期内的所有匹配。该时期定义为SEVIRI的再分析校正的plusmn;14天和近实时校正的-14/ 0天,并且被选择以确保仪器定标中的漂移可忽略不计[6]。这些GSICS校正是将被目标仪器观察到的辐射转换为与定标一致的参考的函数:
在该分析中,每个匹配观察到的辐射都被扰动。然后,重新计算回归以生成修正函数,其将产生不同的校正辐射:
这量化了匹配辐射中的误差如何传播到不同场景辐射的GSICS校正中的误差。对GSICS校正的不确定度进行估计,使用在一系列场景辐射范围内评估的普朗克函数的导数将其转换为亮温。
基于案例研究,在以下各节中分析了系统误差和随机误差的各种机制所引起的不确定度,在SEVIRI观测到的大部分辐射动态范围(至少在晚上)计算不确定度。这对于减少外推误差很重要。对其他情况的重复评估表明,合成不确定度的结果变化约plusmn;20%,这取决于用作GSICS校正计算输入的匹配辐射的分布。总之,这些将不确定度分析的准确度限制在大约两倍。
3 系统误差
尽管配置算法确保样本服从对称分布,但实际上仍然存在小的残差,这在最终产品中引入了系统误差。这些采样差异引入了每个配置的辐射误差,这取决于它们对每个变量的灵敏系数,这是使用案例研究的统计数据估算得到的。如果有关采样分布的信息,则已在分析中使用——否则,匹配标准已被视为限制并作为标准不确定度传播,假设误差遵循这些限制内的矩形分布。这些是相对简单的处理方法,如果认为有必要进行更准确的分析,可以根据ISO 14253-2:2011建议的方法对主导性影响因素进行修订[9]。该方法定义了不确定度管理的迭代程序[10]。
3.1 系统误差的分析方法
对于引入系统误差的每个过程,每个匹配点的辐射亮度由表示其估计的不确定度扰动:
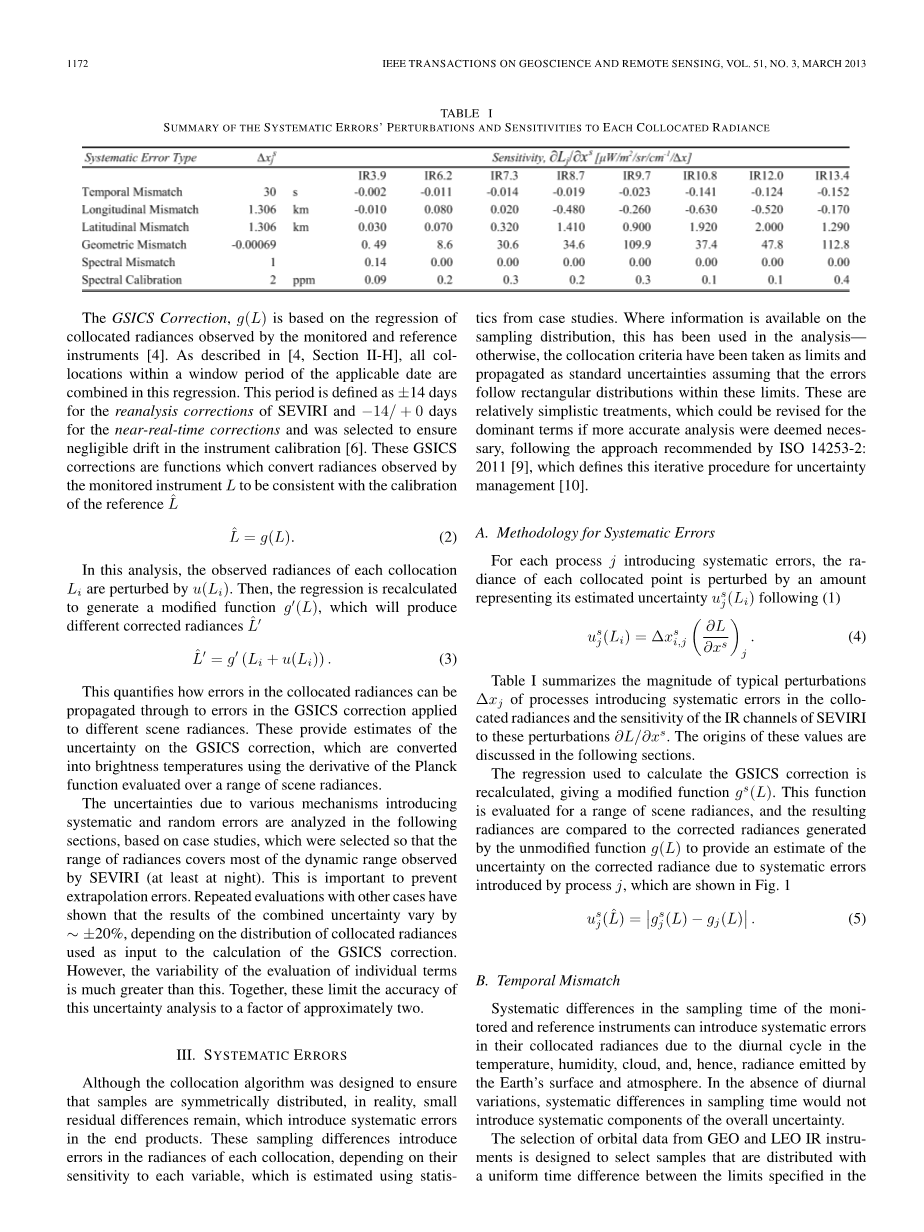
表1总结了在匹配辐射中引入系统误差的过程的典型扰动的大小以及SEVIRI的IR通道对这些扰动的灵敏系数。以下各节将讨论这些值的来源。
表1 系统误差对每个匹配辐射的扰动和灵敏系数
重新计算用于计算GSICS校正的回归,给出修正函数。评估该函数的一系列场景辐射,并将得到的辐射与未修改的回归函数产生的校正辐射进行比较,以提供由于过程引入的系统误差引起的校正辐射的不确定度的估计, 如图1所示
3.2 时间不匹配
由于温度、湿度、云的昼夜循环以及地球表面和大气发出的辐射,目标和参考仪器的采样时间的系统差异可能在其匹配辐射中引入系统误差。在没有昼夜变化的情况下,采样时间的系统差异不会引入整体不确定度的系统组成部分。
从GEO和LEO IR仪器中选择轨道数据的目的是选择在配置标准中规定的极限之间均匀分布的样本(在这种情况下,)。然而,假设它们的时钟是准确的,则Meteosat和IASI观察到的匹配的时间之间存在平均差异。通过计算SEVIRI在配置目标区域上的连续图像中观察到的大系列辐射之间的平均差异,接近Metop-A过升交点时间(UTC),评估了辐射对采样时间变化的灵敏系数:
由于只有来自Metop-A夜间过升交点时刻的数据用于交叉定标,因此表面温度的平均变化率相对较小(-0.2 K/h),因此辐射对系统时序差异相对不敏感。因此,在应用GSICS校正后,时间不匹配对SEVIRI辐射的组合不确定度贡献lt;0.01 K,如图1所示。
3.3 经度和纬度不匹配
被目标仪器和被比较的参考仪器的地理定位中的系统误差引入了它们的匹配辐射中的误差,这是由于它们在配置域上的辐射中的小的纵向和纬度平均梯度。
由于每个像素的确切地理定位误差未知,我们假设它们均匀分布在其导航所引用的精度上。基于操作图像处理设施处理的SEVIRI 1.5级图像的图像导航(校正)的典型精度计算为1.2 km [11]。IASI 1c级数据的地理定位精度计算为1-2 km [12]。假设这些误差在经度和纬度之间平均分配。它们的不确定度线性组合起来作为保护带,因此假设纵向位置误差均匀分布在,这相当于标准不确定度。将匹配辐射对经度中的系统误差的灵敏系数计算为目标域上的Meteosat-9图像的相邻像素之间的辐射的平均差。纬度地理定位误差与生成GEO-LEO匹配的大多数域中的经度非常相似。然而,由于纬度温度和湿度梯度,辐射对纬度误差比经度更敏感。
值得注意的是,对于大多数通道,时间不匹配是系统不确定度的主要来源,而纬度不匹配为8.7和9.7mu;m通道引入了更大的不确定度。这可能是由于这些通道敏感的冰云和臭氧的纬度梯度。
3.4 几何不匹配
即使匹配在表面位置方面完全对齐,来自不同卫星上的仪器的观测也不会在观察和太阳几何方面完全对齐。虽然SEVIRI的红外通道中的辐射对本研究中使用的夜间条件下的太阳和方位角不敏感,但它们受入射角的影响,沿不同大气路径的吸收和表面发射率的变化。
仅当像素的入射角为大气路径差的比率小于1%(即)时,这才满足匹配像素的条件。对于典型的入射角theta;=30°,这对应于角度差Delta;theta;=1°。在实践中,匹配可以具有在plusmn;Delta;theta;范围内均匀分布的不同入射角。然而,如果视角差异的实际分布不对称,则系统偏差将被引入到交叉定标产品中。在这种情况下,我们可以使用为用于生成典型GSICS校正匹配计算的空气质量的实际差异。它们遵循范围内的矩形分布,平均值。
通过比较在大气和表面条件范围内的入射角30°和29°的每个通道的RTM输出来估算对这些变化的平均灵敏系数,表示在不同高度的晴朗天空或均匀云。
由于视差误差,云引入了额外的不确定度,其大小将取决于每个配置的几何形状(入射角theta;和相对方位角Delta;)以及云顶高度。然后可以使用针对空间不匹配和可变性导出的灵敏系数分别估计由视差误差引入的不确定度,使用空间偏移:
在匹配区域上的平均云顶高度估计为(尽管变化较大)。对于入射角theta;= 30°,GEO-LEO方位角的平均差为Delta;= 90°,这引入了平均视差误差。这与地理定位的一个组成部分相关的系统不确定度(前面提到的空间不匹配)和由于匹配引起的随机不确定度(下文中的空间变异性)相当。然而,视差误差将对高云区域中的匹配产生更大的影响,其具有更大的空间可变性并且在将GSICS校正应用于低辐射场景时相应地产生更高的不确定度。通过比较从具有低和高相对方位角的匹配计算的GSICS校正,实验证实了这一点。由此产生的差异很小,但在八个通道中的四个中仅具有统计显着性,并且对于低辐射场景而言是最大的。
3.5 光谱不匹配
当比较不同通道测量的辐射时,必须非常小心地考虑由它们的不同光谱响应引入的差异。已经开发了许多方法来实现该光谱校正。但是,没有光谱校正方法可以是完美的,并且残余误差将保留在比较的辐射中,包括系统组件。即使使用高光谱参考仪器,如IASI,在配置辐射与宽带辐射计(如SEVIRI)的比较中也存在不确定度,由于高光谱仪器的光谱校准精度和用于解释其GEO通道的不完全光谱覆盖的间隙填充方法。
3.5.1 GEO-LEO光谱不匹配
高光谱参考仪器对宽带目标仪器的覆盖范围的缺陷需要在其可以比较其匹配观测值之前进行说明。在SEVIRIIASI交叉定标的情况下,可以采用一种简单的方法来解释这种缺陷,因为只有SEVIRI的IR3.9通道具有IASI的不完全覆盖,其停留在2760cm-1。LBLRTM逐行代码[13],包括HITRAN2004光谱线参数数据库[14],包括大气和环境研究新版本2.0 [15],用于计算九个大气压的全热红外范围内的辐射光谱,具有不同的云量。这些与SEVIRI光谱响应函数(SRF)和整个频带上的积分相比较、与在2760 cm-1处截断的积分相比较。开发了一个简单的线性模型,用于估算整个SRF上的截止SRF上的辐射率。这产生了从-0.08 K到-0.35 K的校正,具体取决于场景辐射。IR3.9通道的该校正的均方根(rms)不确定度为0.005K。通常,在比较两个仪器的观测值时,还会有用于执行光谱校正的RTM中的系统误差。但是,在SEVIRI-IASI的情况下,光谱校正的不确定度非常小,因此可以忽略建模误差的影响。
3.5.2 LEO光谱定标精度
IASI的预发射表征证实其通道的相对光谱偏移在Delta;nu;/nu;= 2 ppm [12]的要求范围内。通过将SRF的波数移动该比率并重复频谱卷积,估计了搭配的辐射对IASI信道中心频率的系统偏移的敏感性。得到的辐射与未受干扰的SEVIRI通道(lt;1 mK)计算的辐射可忽略不计。
3.5.3 GEO光谱定标精度
SEVIRI通道的官方SRF是根据对其硬件组件执行的一系列测试计算得出的。这些被组合并以选择的不规则波长间隔表示,以代表具有最小误差的完整SRF。但是,SRF定义可以解释,与高光谱参考仪器相比,这可能在辐射中引入误差。例如,虽然建议使用线性插值将已发布的SRF转换为IASI通道波数,但可以使用其他插值方法。使用线性和二次插值重复计算,并且比较结果以估计由于这种模糊性引入的可能误差的大小,这个误差非常小(~0.01 K),如果我们假设SRF在GEO观测的应用和交叉定标的计算中被解释为推荐的并且以一致的方式被解释,则可以忽略不计。
3.6 合成和比较所有系统误差
由系统过程引起的所有不确定度以正交方式加入,得出合成不确定度
将由于所有系统误差引起的校正辐射的总不确定度与图1中每个考虑的机制的贡献进行比较。在这里,已经评估了在样本案例中使用的所有匹配上观察到的辐射范围的不确定度。SEVIRI的完整动态范围可能稍大,但需要更多的情况才能生成可靠的统计数据。
将辐亮度和不确定度转换为亮温以便于比较。由于普朗克函数的非线性,这导致低场景辐射的不确定度看起来更大。虽然这有助于低场景辐射出现更大的不确定度,但这种增加主要是由于回归中使用的匹
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[18889],资料为PDF文档或Word文档,PDF文档可免费转换为Word



