CAN总线数据汇集器毕业论文
2020-02-17 23:04:50
摘 要
控制器局域网(Controller Area Network简称CAN)是由德国Bosch公司为汽车应用而开发的广泛应用于汽车分布式嵌入式系统的总线协议。为了解决汽车上大量电子设备之间的通信需求造成电子设备之间信号线繁复的问题,于是德国Bosch公司设计了一个所有的外围设备都可以连接到总线上的单一性网络总线。CAN总线作为一种技术先进、可靠性高、功能完善、成本低廉的网络通信控制方式被广泛应用于各种工业领域。本文通过对一个数控系统CAN总线的通信数据进行分析,设计一款数控主机的CAN总线数据汇集器,将多个扩展模块的数据汇集起来显示或控制,扩展模块具备16个开关量输入 16个开关量输出,汇集器至少要汇集16个模块的数据,达到256个输入和256个输出。
在文章的开始,先对CAN总线技术的应用和发展进行了充分地介绍,接着对与论文有关的CAN总线技术和STM32芯片进行了介绍与研究,并对CAN总线数据汇集器的总体结构和功能设计,并完成了基于STM32单片机的基本外围电路、按键、液晶显示电路以及包括LED灯检测电路等模块的电路原理图和硬件及软件设计。最后用所设计出来的CAN总线汇集器进行的测试和调试,验证了该设计的可行性、可靠性。
在完成所有设计并制作实物进行调试后,试验结果表明,本文设计的CAN总线数据汇集器系统性能稳定,满足本次设计的要求。
关键词: CAN总线;STM32;数据汇集。
Abstract
The Controller Area Network , or CAN, is a bus protocol developed by Bosch for Automotive Applications and widely used in distributed embedded system. In order to solve the problem of complicated signal lines between electronic devices caused by the communication requirement between a large number of electronic devices on automobiles, so Germany Bosch designed a single network bus on which all peripheral devices can be connected. As an advanced technology, high reliability, perfect function and low cost network communication control method, CAN bus is widely used in various industrial fields. By analyzing the communication data of a CNC system CAN bus, this paper designs a CAN bus data collector of CNC host computer, which CAN display and control the data of several extended modules The expansion module has 16 switch inputs and 16 switch outputs, and the collector has to collect data from at least 16 modules to 256 inputs and 256 outputs.
This paper first introduces the Application and development of CAN bus technology, then introduces and studies the CAN bus technology and STM32 chip related to the paper, and designs the overall structure and function of CAN bus data collector The circuit diagram, hardware and software design of the basic peripheral circuit, the key-press, the Liquid Crystal Display Circuit and the module including the LED lamp detection circuit are completed. Finally, the designed CAN bus Assembler is tested and debugged to verify the feasibility and reliability of the design.
The test results show that the designed CAN bus data collector system has stable performance and meets the requirements of this design.
Key Words:CAN Bus; STM32; Data collection.
目 录
第1章 绪论 1
1.1课题的背景及意义 1
1.2 国内外当前的研究现状 2
1.3 课题研究的内容与计划 3
1.4 本章小结 3
第2章 方案选择与设计 4
2.1 系统总体结构 4
2.2 方案选择 4
2.3 CAN总线 5
2.4 STM32的bxCAN控制器介绍 7
2.5 本章小结 8
第3章 系统硬件设计 9
3.1 STM32F103系统设计 9
3.1.1晶振电路 9
3.1.2复位电路 10
3.1.3 电源电路 10
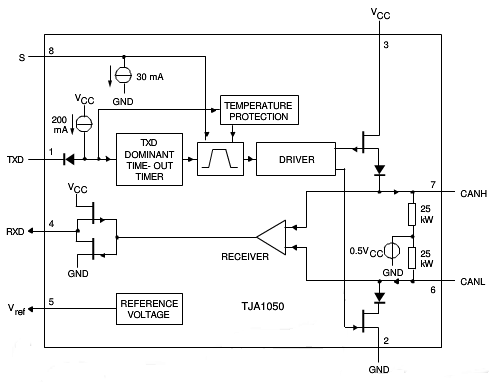
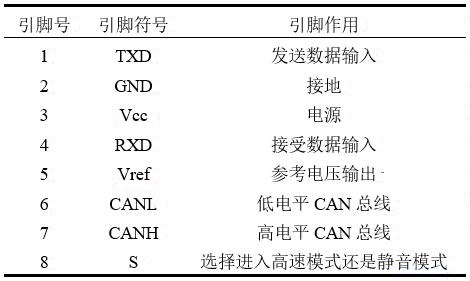
3.1.4 CAN收发器电路 11
3.2主节点硬件电路设计 12
3.3扩展节点硬件电路设计 14
3.4 本章小结 15
第4章 系统软件设计 16
4.1 STM32的软件开发环境 16
4.2 CAN总线数据汇集器的软件设计实现 16
4.2.1整体软件设计 16
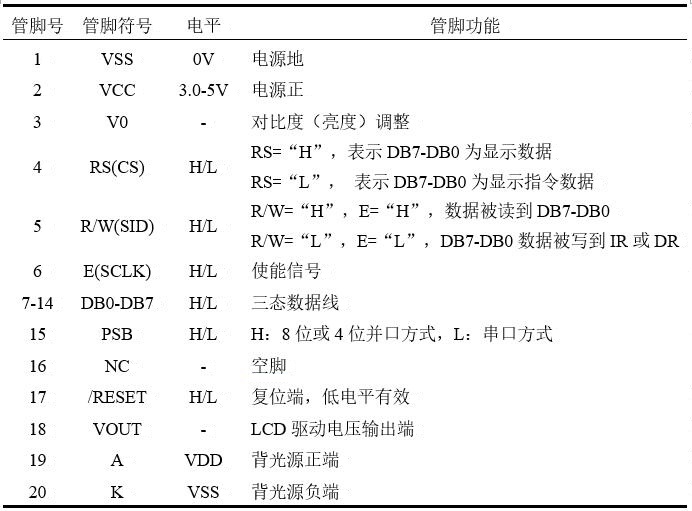
4.2.2 LCD12864模块软件设计 17
4.2.3 按键、LED模块软件设计 17
4.2.4 CAN模块软件设计 18
4.3 本章小结 20
第5章 实物调试 21
5.1 实物调试 21
5.2 测试结果分析 22
5.3 本章小结 23
第6章 总结 24
参考文献 25
致谢 26
- 绪论
随着现代化的发展,工业控制技术发展快速,这对数据传输的即时性、灵活性、可靠性提出了新的要求,这就需要现场总线技术跟随时代的脚步进行创新。适应于这一要求的CAN总线就是具有全数字化、全分散性、全透明化、标准化和规范化等特点,能很好地满足不同传感器和不同设备与之连接的条件。本文中CAN总线数据汇集器主要是制作一个能对扩展模块进行控制并显示通过CAN总线从扩展模块获得的数据。
1.1课题的背景及意义
在1980-1990年,数字仪表日渐成熟,分散型控制系统(DCS,Distributed Control System)计算机也实用化,在保证可靠性的基础上也实现了价格的合理化;分析仪器也逐步实现计算机或数字化,综上可以看出,这十年确实是微型计算机在工业生产的应用成熟期。工业生产过程得以实现优化控制,主要得益于计算机技术日新月异的迅猛发展以及人们在工业生产过程中的普遍运用,这一不仅大幅度提高了设备的生产技能,而且也降低了能源消耗,节省了生产费用。但是随着工业生产的飞速发展,工业生产要求越来越多的测控点和越来越高测控参数,这也是使一个自动控制系统变得越来越庞大复杂的原因,如此一来原有的分散型控制系统就不再能够满足工业需求了。为了适应新的时代需求,新一代现场总线控制系统(FCS,Fieldbus Control System)应运而生,并且具有了全数字化、全分布式和全开放性等前所未有的特点。现场总线是现代总线控制系统的中心要素,而现场总线技术是综合计算机技术、通信技术和控制技术而形成的使传统的自动控制系统的革命性变革由此而生,变革范围涵盖广泛,一方面是传统的信号标准、通信标准和系统标准,另一方面也使现有的自动控制系统的体系结构、设计方法、安装调试方法和产品结构发生变革。计算机控制随着计算机软硬件水平的提高和集成电路制作技术的飞速发展已经从模式化的控制阶段成长到灵活的现场总线控制阶段[2]。
随着汽车产业的出现,德国BOSCH公司率先提出的CAN总线来应用于汽车的发展。汽车成为消费品之后,消费者对其性能上的要求也越来越高,而这些功能的改善很大程度上是依赖于电子操作的,这就使存在于电子装置之间的通信日益复杂。CAN总线的产生就是针对现代汽车产业中减少冗杂的电子装置之间的通信线,也就是德国BOSCH公司设计的总线,可以使所有外围器件挂接到该总线上,实现彼此之间的良性互动。就通信功性能上的特点而言,CAN 总线在可靠性和灵活性上的突出优势使其逐渐成为市场上公认的最具发展前景的现场总线之一,特别突出在发展潜力和应用空间这两方面。由于现场总线技术的出现和发展对工业控制领域产生了巨大影响,现场总线技术已经成为现今自动化领域中最具竞争力的分支之一,也标志着工业控制技术领域开始了一个全新的时代。1991年9月Philips Semiconductors制定并发布了包括A和B两部分的CAN总线技术规范,CAN2.0A给出了CAN报文标准格式,而CAN2.0B给出了标准和扩展的两种格式。1993年11月CAN已成为国际标准ISO11898(高速应用)和ISO11519(低速应用),这为CAN的标准化和规范化奠定了基础,使其得以确立了欧洲汽车总线标准的地位[17]。在这一现状下,CAN总线凭借其在数据通信过程中所具有的高效的数据处理能力、灵活的自由通信模式及可靠的错误处理能力等特点迅速崛起,目前已在各种工业现场得到广泛应用。
1.2 国内外当前的研究现状
在国外,随着CAN总线技术的迅猛发展,其应用在汽车领域呈现了普遍化的趋势。其中奔驰S型系列就采用了CAN总线系统,美国商业制造商也将重点关注这一发展态势良好的现场总线系统。而且由于CAN总线具有高可靠性和高安全性的优点,CAN总线技术在医疗器械和电梯控制系统等领域也得到了广泛的应用,小至家用电器,大到智能小区的安防系统等都离不开CAN总线技术。正是因为CAN总线机制的节点访问相对自由,通信速率符合要求的同时价格又相对低廉等优越的特性,开发者才极力使CAN总线技术在各个领域推广开来。1992年,旨在促进CAN总线的进一步发展,欧洲成立了CiA(CAN in Automation),并吸引了许多公司的加入。CiA不仅仅局限于将CAN总线技术应用到汽车电子控制系统领域,而且与日常生活息息相关的电梯监控系统中也有应用,甚至CAN总线技术引入到了医疗仪器、纺织机械、船舶运输等领域。CiA对CAN总线技术的应用目前处于最高水准,不单单满足了在各个领域应用的性能要求,而且能做到成本最小化,功能性与实用性并存,广受好评。
CAN总线最大信号速率为1Mbps,主要适用成为汽车装置中的多主消息广播系统。与传统的网络(如USB和以太网)相比,CAN不需要在中央总线主机的监督下点对点地发送大型数据块。为了保证每个节点数据间的相互一致,通过CAN网络保证短消息被广播到整个网络空间。最近对汽车网络带宽要求的增加已经使CAN达到了极限,为了满足这些要求,最近开发的CAN-FD允许更高的费率和有效载荷[20]。这个新协议的控制器也执行标准的CAN通信,为未来的汽车系统提供了一个新的选择。导致这种新协议的动机包括:(i)满足通信带宽需求的增加;(ii)提供一种协议,以最大带宽1Mbps 填补低速和廉价CAN总线与高速但昂贵的FlexRay 间的差距,最大带宽为10-20Mbps;(iii)避免从CAN迁移到FlexRay或以太网所涉及的昂贵的移植工作。现实和未来的系统,如汽车和工业领域包含复杂的功能,需要基于CAN的高层协议与数据通过CAN(控制器局域网路)技术提供了1Mbps的高带宽和有效载荷高达8字节,实际上是超载,不能满足需求的下一代汽车电子系统。尽管提出了一些替代方案,但是许多努力都集中在CAN的增强上,于是CAN-FD(具有灵活数据速率的控制器局域网路控制器) 诞生了。然而CAN-FD是一种改进的通信技术,带宽高达8Mbps,有效载荷高达64字节。
国内CAN总线的发展尚处于起步阶段,其应用范围相对狭窄,主要为汽车网络、医疗设备和工程机械等领域,但随着进一步得到重视,也吸引了众多专家学者投入研究开发之中。目前我国工业控制系统中,低端设备的控制系统更多的是分散式的,各个测量点与控制点之间的通信主要依赖于工作人员之间的协调,实时性和效率都较为低下;中端设备通常采用集中式控制系统控制,当主机出现故障时,整个控制系统可能会因此瘫痪,这是这种系统的最大弊病。在这种情况下,现场总线的出现和应用就较好地解决这一问题,因而CAN总线作为公认最具发展前景的现场总线之一,恰好顺应了工业控制体系全面发展的趋势,具有了较高的推广与研究价值。随着国际化市场的发展,国内的自动化系统和设备的发展也正朝着现场总线体系的方向,现场总线技术的发展也朝着商业化和应用化的方向。
1.3 课题研究的内容与计划
课题的研究内容是通过对一个数控系统CAN总线的通信数据进行分析,设计一款数控主机的CAN总线数据汇集器,将多个扩展模块的数据汇集起来显示或控制,扩展模块具备16个开关量输入、16个开关量输出,汇集器至少要汇集16个模块的数据,达到256个输入和256个输出。
本文第1章中,首先概括说明了该课题的背景及意义、国内外当前的研究现状以及制定了课题研究的计划;第2章则对课题提出研究方案并进行论证,还对课题必要的原理进行叙述;第3章则开始根据第2章选择的方案进行系统硬件电路设计;在设计完硬件电路后,第4章开始对其进行软件设计;软硬件设计都完成后就开始实物制作,并在第5章进行实物调试和结果分析;最后在第6章进行总结,叙述设计所完成的内容和以及达到的设计指标以及运行结果。
1.4 本章小结
本章节主要讲述了课题的研究背景意义、研究国内外发展现状以及课题研究的内容和计划。
- 方案选择与设计
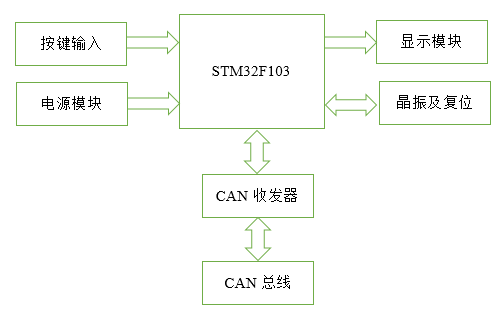
2.1 系统总体结构
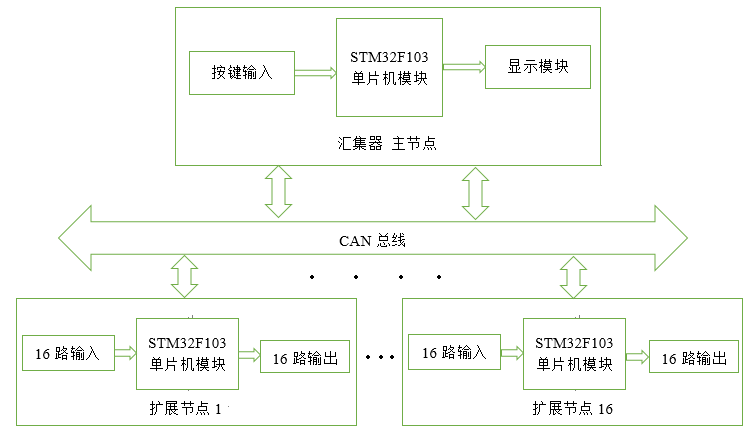
由于CAN总线属于分布式控制的总线,因此对它来说总线上的节点都相对简单不复杂。为了实现具体的特定功能,对CAN总线数据进行处理通常采用MCU控制器,而且如果要将CAN总线各个节点连接起来仅仅需要少量的线缆。因此CAN总线具有高可靠性。本次设计CAN总线数据汇集器要求将多个扩展模块的数据汇集起来显示或控制,其CAN总线节点网络结构如图2.1所示[13]。
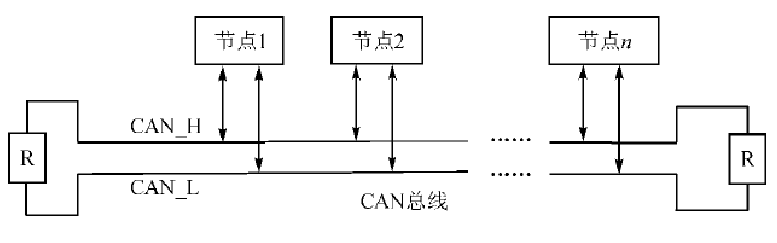
图2.1 CAN总线节点网络结构
2.2 方案选择
CAN总线节点有两种硬件构成方案,如下图2.2所示:
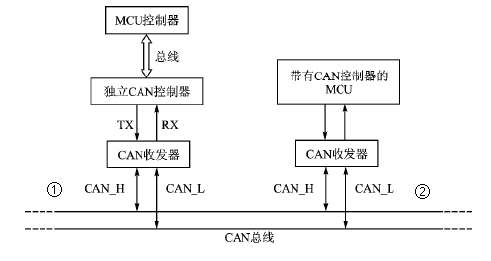
图2.2 CAN总线节点的硬件构成方案
方案一:MCU控制器、独立CAN控制器以及CAN收发器依次相连接。
方案二:带有CAN控制器的MCU 和 CAN收发器直接相连接。
从上述两种方案可以看出这两种方法都是将CAN收发器和CAN总线相连从而达到目的。但是通过对比验证,这两种方法在对于软件开发方向各有优点和缺点,先分析如下所示:
如果使用方案一,编写CAN程序时不需要对整体的CAN控制器进行编写实现,而只需要针对使用的独立CAN控制器,而在MCU上可以连接到任意的独立CAN控制器,所以这样就使得所编写的程序可移植性相对较好。但是因为采用了独立的CAN控制器,MCU被占用的I/O口资源会增加,这样就使得该电路更加复杂化。
如果使用方案二,编写的CAN程序时则需要针对选择使用的特定MCU,而针对特定MCU的CAN程序写好后是不可以移植别的MCU控制器中。但是由于CAN控制器单元在MCU控制器中集成,这种方法使得设计硬件电路时变得更加简单。
综上所述两种方案各有利弊,但由于本文为学生设计,在功能设计和硬件电路设计方面均会选择从简。所以从系统需求角度和硬件复杂度考虑,本设计拟定采用方案二,这样既可以实现已定功能,同时也节约了实物制作成本和降低硬件系统实现起来的复杂性。
2.3 CAN总线
CAN总线目前是国际上应用最广泛的现场总线之一,因为它是唯一一个具有国际标准的现场总线。这在于CAN总线具有优越的特性主要如下:
- 成本低廉。
- 数据传输距离远(最远长达10km)。
- 数据传输速率高(最高达1Mbit/s)。
- 无破坏性的基于优先级的逐位仲裁。
- 借助验收滤波器的多地址帧传递。
- 远程数据请求。
- 可靠的错误监测和出错处理功能。
- 发送的信息遭到破坏后,可自动重发。
- 暂时错误和永久性故障节点的判别以及故障节点的自动脱离。
- 脱离总线的节点不影响总线的正常工作。
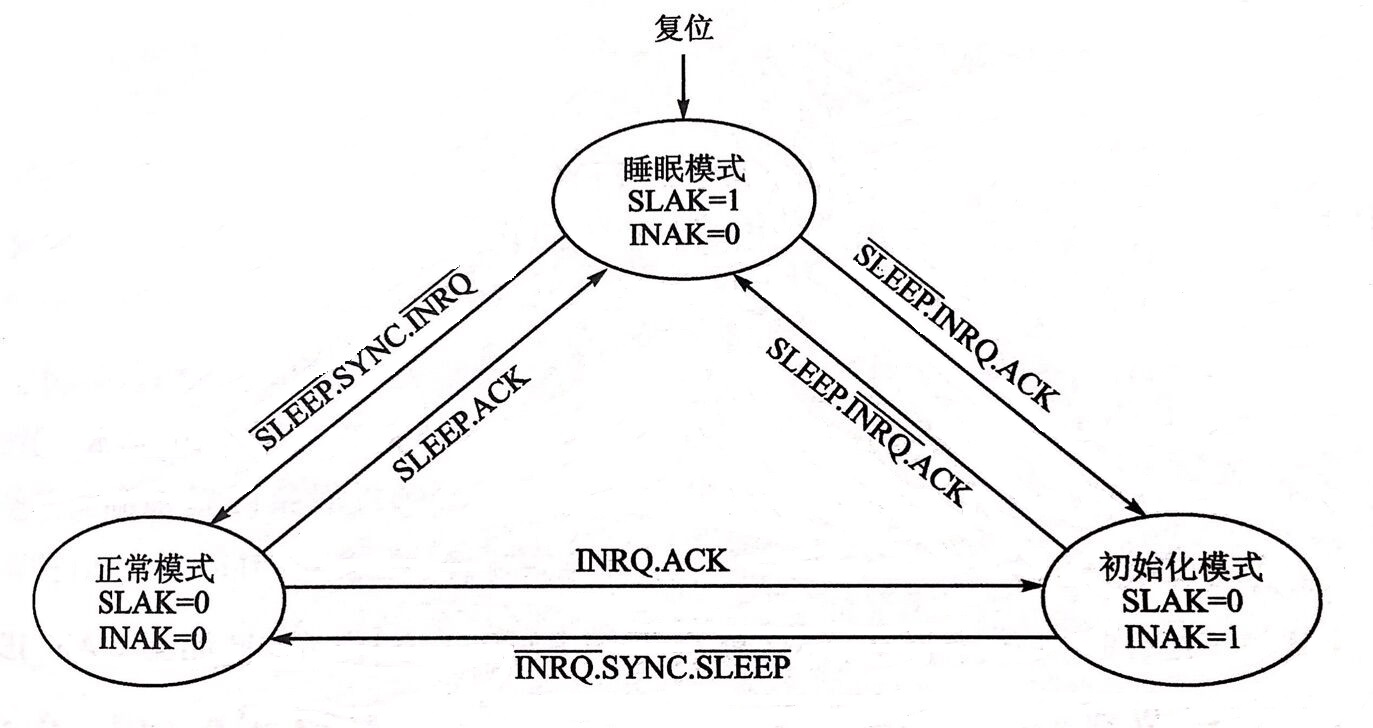
由于CAN总线的特性优越、应用广泛,越来越多的芯片制造厂商都推出了独立的CAN控制芯片或者带有CAN控制器的MCU。而本文采用的就是带有CAN控制器的STM32作为主控芯片,在众多32位微处理器中,STM32F103系列的内核是32位的ARMCortex-M3RISC内核。STM32F103单片机的闪存空间为128K字节,并且其SRAM高速存储器可达20K字节,其工作频率可以达到72MHz,而且STM32F103单片机I/O端口极其丰富,这种条件对于CAN总线网络的高性能提供了许多便利。
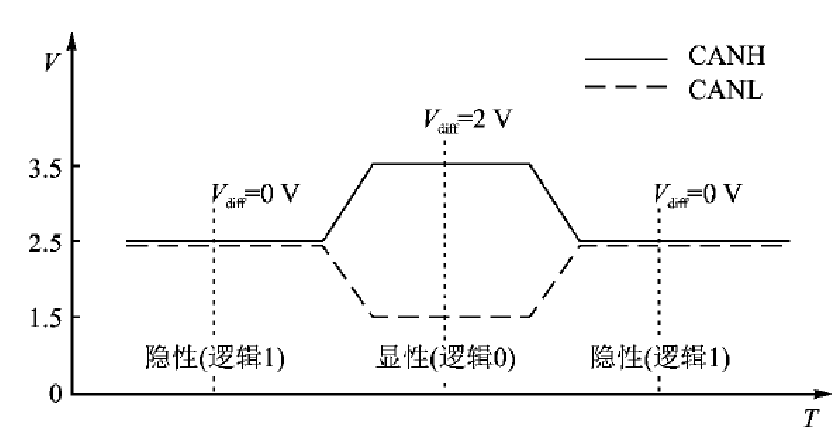
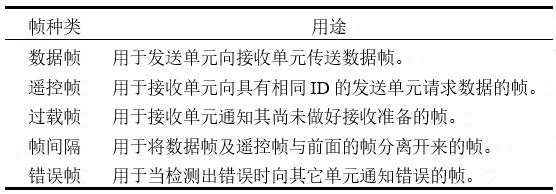
在CAN总线上传输的信息称为报文,并且总线上连接的单元只有检测到总线空闲状态的位信息时才可以发送新的报文。该报文信息包含有几种不同的固定帧类型和两种不同的帧格式,根据在CAN总线通信中的不同的用途列出了下列5种帧类型以及标准帧和扩展帧两种帧格式[12]。
- 帧的种类和用途如表2.1所示:
表2.1 CAN总线报文帧类型
- 帧格式的种类说明如表2.2所示:
表2.2 帧格式的种类说明
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: